Dispositivo autónomo de manipulación de envases.
Un dispositivo de manipulación de envases autónomo dispuesto contiguamente a un dispositivo giratorio de transporte de envases que tiene un camino de transporte arqueado y efectúa operaciones predeterminadas de manipulación del envasado,
en envases que son transportados a lo largo del camino de transporte arqueado, comprendiendo dicho dispositivo de manipulación de envases autónomo:
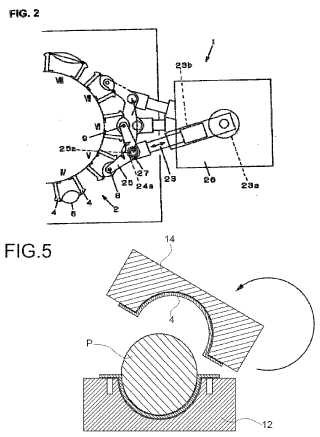
un brazo que tiene un fulcro de giro del mismo en el exterior de dicho camino de transporte arqueado y configurado para girar horizontalmente y para extenderse y retraerse;
un miembro de manipulación de envases dispuesto en una parte del extremo distal de dicho brazo y configurado para ascender y descender;
un medio de accionamiento para hacer girar a dicho brazo horizontalmente;
un medio de accionamiento para extender y retraer a dicho brazo;
un medio de accionamiento para elevar y descender dicho miembro de manipulación de envases; y
una unidad de control para controlar dichos medios de accionamiento
para hacer avanzar a dicho miembro de manipulación de envases a lo largo de dicho camino de transporte arqueado, en sincronismo con el transporte de dichos envases y, al alcanzar un punto de final del avance, desplazar dicho miembro de manipulación de envases devolviéndolo a una posición inicial del mismo, y
para elevar y descender dicho miembro de manipulación de envases en momentos predeterminados, durante el recorrido de alternancia de dicho miembro de manipulación de envases.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11001573.
Solicitante: TOYO JIDOKI CO., LTD..
Inventor/es: KOGA, SHOICHI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65B39/12 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 39/00 Boquillas, embudos o guías para introducir objetos o materiales en los receptáculos o los embalajes. › que pueden acercarse o alejarse del receptáculo o del embalaje durante el llenado.
- B65B39/14 B65B 39/00 […] › que pueden desplazarse con el receptáculo o el embalaje.
- B65B43/46 B65B […] › B65B 43/00 Formación, alimentación, abertura o montaje de receptáculos o recipientes, en unión con el embalaje (formación de bolsas en las hojas, los elementos de envoltura o en las bandas, presionando el material en las matrices o desplazándolo sobre matrices de plegado B65B 47/00). › sirviéndose de zarpas.
PDF original: ES-2387555_T3.pdf
Fragmento de la descripción:
Dispositivo autónomo de manipulación de envases.
ANTECEDENTES DE LA INVENCIÓN
1. Campo de la invención
La presente invención está relacionada con un dispositivo autónomo de manipulación de envases que está dispuesto contiguamente a un dispositivo giratorio de transporte de envases, que tiene un camino de transporte arqueado y realiza operaciones predeterminadas de manipulación del envasado en los envases que son transportados a lo largo del camino arqueado de transporte.
2. Descripción de la técnica relacionada
En las máquinas de envasado, se han utilizado dispositivos de manipulación de envases que llevan a cabo operaciones predeterminadas de manipulación del envasado en los envases que son transportados por un dispositivo giratorio de transporte de envases, a lo largo de un camino de transporte arqueado en un plano horizontal, al tiempo que desplaza unos miembros de manipulación de envases en sincronismo con los envases. Los miembros de manipulación de envases se desplazan (o avanzan) en sincronismo con los envases desde su posición inicial sobre el camino de transporte arqueado, dentro de un recorrido predeterminado, a lo largo de un camino de transporte arqueado y, después de detenerse en el punto final del avance, son devueltos (o desplazados hacia atrás) a la posición inicial. Las operaciones predeterminadas de manipulación de envases se llevan a cabo en los envases durante el movimiento de avance de los miembros de manipulación (incluyendo el momento de detención de los mismos) .
Los dispositivos giratorios de transporte de envases que tienen caminos de transporte arqueados incluyen un tipo que incluye un camino de transporte circular (consistente solamente en caminos de transporte arqueados) y un tipo que incluye caminos de transporte en forma de pista de carreras (incluyendo caminos de transporte arqueados en ambos extremos) , y la manera de transporte incluye tanto el transporte continuo como los transportes intermitentes.
En una máquina embotelladora (que se corresponde con la máquina envasadora en la descripción de la presente invención) , divulgada por ejemplo en la solicitud de patente japonesa a disposición pública (de Kokai) con el número S59-46874, se dispone un dispositivo de llenado de líquido (que se corresponde con el dispositivo de manipulación de envases de la presente invención) por encima de una mesa (que se corresponde con el dispositivo giratorio de transporte de envases de la descripción de la presente invención) , que transporta intermitentemente botellas a lo largo de un camino de transporte circular. Este dispositivo de llenado incluye un husillo que está posicionado en el centro de la mesa (y está por tanto en el centro del camino de transporte circular) , un miembro de soporte de toberas en forma de abanico fijado al husillo, y una pluralidad de toberas de llenado del líquido (que se corresponden con los miembros de manipulación de envases de la presente invención) dispuestas en forma arqueada con una separación predeterminada entre ellos a lo largo del perímetro del miembro de soporte de las toberas. A medida que gira el husillo de una manera alternada, las toberas de llenado se desplazan (o avanzan) intermitentemente a lo largo del camino de transporte circular (arqueado) de las botellas, en sincronismo con el transporte de las botellas y después, al detenerse en el punto del final del avance, son desplazadas hacia atrás (o devueltas) a la posición inicial. Las toberas de llenado descienden en la posición inicial y se elevan en el punto final del avance. En el mecanismo de accionamiento intermitente de la mesa, se incorpora un mecanismo que hace girar alternadamente al husillo, es decir, un mecanismo que hace que las toberas de llenado den vueltas de manera alternada a lo largo del camino de transporte arqueado.
En la máquina envasadora divulgada en la solicitud de patente japonesa a disposición pública (de Kokai) con el número 2009-1322, hay instalado un dispositivo de sujeción de la embocadura (que se corresponde con el dispositivo de manipulación de envases de la presente invención) en la proximidad de una mesa (que se corresponde con el dispositivo giratorio de transporte de envases en la descripción de la presente invención) que transporta bolsas intermitentemente a lo largo del camino circular de transporte. El dispositivo de sujeción de la embocadura incluye un riel guía instalado en el exterior del camino circular de transporte, concéntrico con él, una corredera configurada para un movimiento alternado a lo largo del riel guía, una pareja de garras de apertura de la embocadura (que se corresponde con los miembros de manipulación de envases de la presente invención) instaladas sobre la corredera, y un mecanismo de apertura y cierre del mismo. A medida que la corredera se desplaza de manera alternada, las dos garras de apertura de la embocadura se desplazan (avanzan) intermitentemente a lo largo del camino circular (arqueado) de transporte de bolsas, en sincronismo con el transporte de las bolsas y, tras detenerse en el punto del final del avance (o el final del movimiento de avance) , vuelven (retroceden) a la posición inicial. Las garras de apertura de la embocadura, etc., descienden es la posición inicial, se abren inmediatamente después de iniciarse el movimiento de avance, se elevan en el punto del final del avance, y después se cierran inmediatamente antes de llegar a la posición inicial. En el mecanismo de accionamiento intermitente de la mesa, se incorpora un mecanismo que se eleva y desciende y desplaza alternadamente la corredera, es decir, un mecanismo que eleva y desciende las garras de apertura de la embocadura y las desplaza alternadamente a lo largo del camino de transporte arqueado.
En cualquiera de los casos descritos anteriormente, el camino alternado de los miembros de manipulación de los envases está estructuralmente predefinido. En otras palabras, es una rotación alternada alrededor de un husillo en la máquina embotelladora divulgada en la solicitud de patente japonesa a disposición pública (de Kokai) con el número S59-46874, y es un movimiento alternado a lo largo de un riel guía en la máquina envasadora divulgada en la solicitud de patente japonesa a disposición pública (de Kokai) con el número 2009-1322. Además, hay incorporado un mecanismo de accionamiento que desplaza alternadamente los miembros de manipulación de envases, en el mecanismo de accionamiento del dispositivo giratorio de transporte de envases. Por esta razón, desde el punto de vista del mecanismo, es relativamente fácil hacer que los miembros de manipulación de envases avancen en sincronismo con el transporte de los envases a lo largo del camino de transporte arqueado, por medio del dispositivo giratorio de transporte de envases y después devolverlos a la posición inicial.
Sin embargo, los dispositivos divulgados en las solicitudes de patente japonesas a disposición pública (de Kokai) con los números S59-46874 y 2009-1322, tienen problemas tales como:
(1) El dispositivo de manipulación de envases no puede ser fácilmente separado del dispositivo giratorio de transporte de envases, aun cuando la separación se hace necesaria. Por esta razón, en el dispositivo, por ejemplo, de la solicitud de patente japonesa a disposición pública (de Kokai) con el número S59-46874 es necesario detener toda la máquina embotelladora con el fin de limpiar las toberas de llenado, cuando se cambia el líquido de llenado, lo cual da como resultado inevitablemente una pérdida de la productividad.
(2) Los miembros de manipulación de los envases se desplazan a lo largo del mismo camino cuando avanzan y vuelven. Por esta razón, en el dispositivo, por ejemplo, de la solicitud de patente japonesa a disposición pública (de Kokai) con el número S59-46874, cuando las toberas de llenado vuelven a lo largo del camino de transporte de botellas, el líquido que gotea de las toberas puede pasar potencialmente a las botellas.
(3) El dispositivo de manipulación de envases está configurado para ser utilizado con un dispositivo giratorio específico de transporte de envases y, por tanto, el dispositivo de manipulación de envases adolece de falta de versatilidad. Por ejemplo, no puede utilizarse el mismo dispositivo de manipulación de envases con dispositivos giratorios de transporte de envases que tengan caminos de transporte arqueados de radio diferente.
(4)
Reivindicaciones:
1. Un dispositivo de manipulación de envases autónomo dispuesto contiguamente a un dispositivo giratorio de transporte de envases que tiene un camino de transporte arqueado y efectúa operaciones predeterminadas de manipulación del envasado, en envases que son transportados a lo largo del camino de transporte arqueado, comprendiendo dicho dispositivo de manipulación de envases autónomo:
un brazo que tiene un fulcro de giro del mismo en el exterior de dicho camino de transporte arqueado y configurado para girar horizontalmente y para extenderse y retraerse;
un miembro de manipulación de envases dispuesto en una parte del extremo distal de dicho brazo y configurado para ascender y descender;
un medio de accionamiento para hacer girar a dicho brazo horizontalmente;
un medio de accionamiento para extender y retraer a dicho brazo;
un medio de accionamiento para elevar y descender dicho miembro de manipulación de envases; y
una unidad de control para controlar dichos medios de accionamiento
para hacer avanzar a dicho miembro de manipulación de envases a lo largo de dicho camino de transporte arqueado, en sincronismo con el transporte de dichos envases y, al alcanzar un punto de final del avance, desplazar dicho miembro de manipulación de envases devolviéndolo a una posición inicial del mismo, y
para elevar y descender dicho miembro de manipulación de envases en momentos predeterminados, durante el recorrido de alternancia de dicho miembro de manipulación de envases.
2. Un dispositivo de manipulación de envases autónomo dispuesto contiguamente a un dispositivo giratorio de transporte de envases, que tiene un camino de transporte arqueado y efectúa operaciones predeterminadas de manipulación del envasado en envases que son transportados a lo largo del camino de transporte arqueado, comprendiendo dicho dispositivo de manipulación de envases autónomo:
un brazo principal que tiene un fulcro de giro en el exterior de dicho camino de transporte arqueado y configurado para girar horizontalmente;
un sub-brazo dispuesto en una parte del extremo distal de dicho brazo principal y que está configurado para girar horizontalmente;
un miembro de manipulación de envases dispuesto en dicho sub-brazo y configurado para ascender y descender con respecto a dicho brazo principal;
un miembro de accionamiento para hacer girar dicho brazo principal horizontalmente;
un medio de accionamiento para hacer girar dicho sub-brazo alrededor de un eje del mismo;
un medio de accionamiento para elevar y descender dicho miembro de manipulación de envases; y
una unidad de control para controlar dichos medios de accionamiento:
para hacer avanzar dicho miembro de manipulación de envases a lo largo de dicho camino de transporte arqueado en sincronismo con el transporte de dichos envases y, al alcanzar el punto final del avance, desplazar dicho miembro de manipulación de envases devolviéndolo a la posición inicial del mismo, y
para elevar y descender dicho miembro de manipulación de envases en momentos predeterminados durante el recorrido de alternancia de dicho miembro de manipulación de envases.
3. Un dispositivo de manipulación de envases autónomo dispuesto contiguamente a un dispositivo giratorio de transporte de envases, que tiene un camino de transporte arqueado y efectúa operaciones predeterminadas de manipulación de envases simultáneamente sobre una pluralidad de envases que son transportados a lo largo del camino de transporte arqueado, comprendiendo dicho dispositivo de manipulación de envases autónomo:
un brazo principal que tiene un fulcro de giro en el exterior del camino de transporte arqueado y que está configurado para girar horizontalmente y para extenderse y retraerse;
un sub-brazo dispuesto en la parte del extremo distal de dicho brazo principal y configurado para girar horizontalmente;
una pluralidad de miembros de manipulación de envases configurados para ascender y descender con respecto al brazo principal, estando instalados los miembros de manipulación de envases sobre el sub-brazo con una separación predeterminada entre ellos y para realizar las operaciones de manipulación de envases simultáneamente sobre dicha pluralidad de envases;
un medio de accionamiento para hacer girar dicho brazo principal horizontalmente;
un medio de accionamiento para extender y retraer dicho brazo principal;
un medio de accionamiento para hacer girar dicho sub-brazo alrededor de un eje del mismo;
un medio de accionamiento para elevar y descender dichos miembros de manipulación de envases; y
una unidad de control para controlar dichos medios de accionamiento
para hacer avanzar dicha pluralidad de miembros de manipulación de envases a lo largo del camino de transporte arqueado en sincronismo con el transporte de dicha pluralidad de envases y, al alcanzar el punto final del avance, desplazar dicha pluralidad de miembros de manipulación de envases devolviéndolos a las posiciones iniciales de los mismos, y
para elevar y descender la pluralidad de miembros de manipulación de envases en momentos predeterminados, durante el recorrido de alternancia de dichos miembros de manipulación de envases.
4. El dispositivo de manipulación de envases autónomo, de acuerdo con cualquiera de las reivindicaciones 1 a 3, en el que dichos medios de accionamiento son servomotores mutuamente independientes.
5. El dispositivo de manipulación de envases autónomo, de acuerdo con cualquiera de las reivindicaciones 1 a 4, en el que el camino de retorno de dicho miembro de manipulación de envases es diferente del camino de avance del mismo.
6. El dispositivo de manipulación de envases autónomo, de acuerdo con la reivindicación 5, en el que el camino de retorno de dicho miembro de manipulación de envases es rectilíneo.
7. El dispositivo de manipulación de envases autónomo, de acuerdo con cualquiera de las reivindicaciones 1 a 6, en el que dicho miembro de manipulación de envases es una tobera de llenado de líquido.
8. El dispositivo de manipulación de envases autónomo, de acuerdo con cualquiera de las reivindicaciones 1 a 7, en el que dicho dispositivo giratorio de transporte de envases es un dispositivo de transporte de envases del tipo giratorio intermitente, para transportar intermitentemente dichos envases a lo largo del dicho camino de transporte; y
dicho miembro de manipulación de envases se desplaza hacia delante con un movimiento intermitente, durante un recorrido de avance, y se desplaza hacia atrás a las posiciones iniciales con un movimiento continuo.
Patentes similares o relacionadas:
Envasado de chips comestibles de aperitivo, del 15 de Julio de 2020, de Frito-Lay Trading Company GmbH (100.0%): Un procedimiento para envasar chips comestibles de aperitivo , comprendiendo dicho procedimiento las siguientes etapas: a) proporcionar […]
 Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…]
Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…]
Dispositivo y procedimiento para transportar y llenar sacos, del 14 de Agosto de 2019, de Statec Binder GmbH: Un dispositivo para transportar y llenar sacos , preferentemente sacos de boca abierta, que comprende un dispositivo de llenado giratorio alrededor […]
 Aparato y procedimiento para transportar y llenar sacos, del 31 de Julio de 2019, de Statec Binder GmbH: Dispositivo para transportar y llenar sacos , preferentemente sacos abiertos, que comprende un dispositivo de llenado giratorio alrededor de un eje de rotación con […]
Aparato y procedimiento para transportar y llenar sacos, del 31 de Julio de 2019, de Statec Binder GmbH: Dispositivo para transportar y llenar sacos , preferentemente sacos abiertos, que comprende un dispositivo de llenado giratorio alrededor de un eje de rotación con […]
Un aparato para la transferencia de artículos farmacéuticos de una máquina de contar al interior de recipientes que avanzan continuamente, del 15 de Mayo de 2019, de MARCHESINI GROUP S.P.A.: Un aparato (D) para transferir artículos farmacéuticos de al menos una máquina de contar (MC) al interior de los recipientes (C) que avanzan en modo continuo a lo largo […]
Un aparato para introducir artículos en envases, del 26 de Abril de 2017, de MARCHESINI GROUP S.P.A.: Un aparato para la introducción de artículos en envases, comprendiendo los artículos productos deformables (B), tales como por ejemplo envases tipo blíster (B), y hojas informativas […]
Procedimiento para llenar y soldar bolsas de lámina y un dispositivo de llenado y de soldadura para el mismo, del 8 de Febrero de 2017, de INDAG GESELLSCHAFT FUR INDUSTRIEBEDARF MBH & CO. BETRIEBS KG: Procedimiento para llenar y soldar bolsas de lámina , en el que varias bolsas de lámina recogidas una detrás de otra […]
Dispositivo para introducir un medio en un recipiente, del 4 de Mayo de 2016, de INDAG GESELLSCHAFT FUR INDUSTRIEBEDARF MBH & CO. BETRIEBS KG: Dispositivo para introducir un medio en un recipiente , por ejemplo una bolsa flexible, con un carrusel giratorio y una o varias estaciones de tratamiento […]