Aplicador automático de grapas quirúrgicas.
Aplicador automático de grapas quirúrgicas (10), que comprende:
un conjunto del mango (12) que presenta un elemento de accionamiento que causa que un primer elemento (30) se mueva secuencialmente en una dirección distal y una dirección proximal, y causa que un segundo elemento (34) se mueva secuencialmente en una dirección proximal y una dirección distal; y
un conjunto aplicador de grapas (14) adaptado para asegurarse a dicho conjunto de mango (12) de forma que se pueda liberar y que tiene un elemento para el cierre de la mordaza (32) y un elemento para el suministro de grapas (36), siendo posible engranar el elemento para el cierre de la mordaza (32) con el primer elemento (30) y siendo posible engranar el elemento para el suministro de grapas (36) con el segundo elemento (34),
caracterizado en que
dicho conjunto de mango (12) está adaptado para proporcionar un movimiento substancialmente paralelo y de sentido opuesto del primer miembro (30) y del segundo miembro (34).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2001/030905.
Solicitante: VITALITEC INTERNATIONAL, S.A.
Nacionalidad solicitante: Francia.
Dirección: Z.A. VAGUE DE LA NOE, ROUTE DE LA GUERCH - BP 1 35680 DOMALAIN FRANCIA.
Inventor/es: FORSTER,Michel,C, LEBOZEC,Jacques.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/12 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › para ligar o comprimir partes tubulares del cuerpo, p. ej. los vasos sanguíneos, el cordón umbilical.
- A61B17/128 A61B 17/00 […] › para aplicar o quitar clamps o pinzas.
PDF original: ES-2385512_T3.pdf
Fragmento de la descripción:
Aplicador automático de grapas quirúrgicas.
El invento se refiere a un dispositivo de grapado quirúrgico automático y, en particular, a un dispositivo de grapado consistente en conjuntos modulares.
Las grapas quirúrgicas son utilizadas en diversos procedimientos quirúrgicos de una forma ampliamente conocida para la unión de tejidos, vasos sanguíneos y similares.
Diferentes dispositivos quirúrgicos son ya conocidos para la aplicación de dichas grapas, tales como las pinzas hemostáticas y similares, que pueden estar cargadas individualmente con grapas, o que están adaptadas para contener un suministro de grapas que se cargan, una de cada vez, para las mordazas del dispositivo. Un ejemplo de un dispositivo de este tipo se describe en la patente de los EE.UU. Nº 4.296.751.
Una de las ventajas de este tipo de dispositivos quirúrgicos es que permiten al cirujano aplicar rápidamente las grapas mientras se lleva a cabo el procedimiento, sin que sea necesario cargar manualmente cada grapa en el dispositivo. Sin embargo, este tipo de dispositivos son normalmente complejos, costosos y en determinados casos poco convenientes o engorrosos para ser usados por el cirujano.
Un dispositivo quirúrgico de este tipo para la aplicación de grapas quirúrgicas se describe también en la EP 0793944 A1. Este dispositivo posee un conjunto para el manejo y una porción de cuerpo alargada que se extiende distalmente desde el mango. En una parte del extremo distal está montado un conjunto de mordazas que incluye primeras y segundas mordazas que se mueven desde una posición abierta a una posición cerrada. Se da a conocer un accionador que es deslizable dentro de la sección alargada del cuerpo en respuesta al accionamiento del conjunto del mango. El accionador tiene una estructura de leva en una sección distal del mismo para mover las primeras y segundas mordazas entre la posición abierta y la posición cerrada. Hay una unidad de carga montada de tal forma que se puede liberar con respecto a la sección de cuerpo alargada y almacena en la misma una serie de grapas quirúrgicas. La unidad de carga incluye un impulsor de grapas que posee una sección que puede ser engranada con el accionador y que se puede mover con el mismo para el avance de la grapa quirúrgica más distal, además de un conjunto de trinquete asociado con el impulsor de grapas para guiar el movimiento progresivo de las mismas.
La patente de los EE.UU. Nº 6.099.537 muestra un instrumento adicional para el tratamiento médico. Dicho instrumento está provisto de una sección de tratamiento para el tratamiento deseado, una sección de inserción que tiene en un extremo la sección de tratamiento, y una sección de funcionamiento que está prevista en el otro extremo de la sección de inserción, maneja la sección de tratamiento, y tiene una parte fija y una parte móvil. La sección de tratamiento se acciona mediante el giro de la parte móvil con respecto a la parte fija. El instrumento de tratamiento médico está provisto además de un cuerpo principal de accionamiento y una cubierta. La sección de inserción se compone de un cuerpo principal y un cartucho para el suministro de una grapa.
La EP 0680729 A1 describe una pistola para fijar grapas quirúrgicas que tiene un cargador de grapas dispuesto en el extremo distal de un eje tubular endoscópico, un mecanismo para el suministro de las grapas, y pinzas con un mecanismo asociado de cierre de las pinzas para la fijación de las grapas. El mecanismo de suministro y el mecanismo de cierre de las pinzas son operados mediante la empuñadura de la pistola.
Existe todavía la necesidad de un dispositivo quirúrgico, en particular de un aplicador automático de grapas quirúrgicas, que sea simple y fiable en su uso, y cuya fabricación resulte menos costosa.
Un objetivo adicional del presente invento es el de proporcionar un aplicador automático de grapas quirúrgicas de manejo suave y cómodo para el usuario.
Otros objetivos y ventajas del presente invento serán mostrados más adelante.
Resumen del invento Los objetivos y ventajas que han sido mostrados anteriormente se alcanzan con facilidad conforme al presente invento.
De acuerdo con el invento, está previsto un aplicador automático de grapas quirúrgicas, el cual comprende un conjunto del mango que tiene un elemento de accionamiento para conseguir que un primer elemento se mueva secuencialmente en una dirección distal y una dirección proximal, y que un segundo elemento se mueva secuencialmente en una dirección proximal y una dirección distal; y un conjunto de aplicación de grapas adaptado para asegurar dicho conjunto del mango de forma que se pueda liberar, que tiene un elemento de cierre de la mordaza y un elemento para el suministro de las grapas, en cuyo caso dicho miembro de cierre de mordaza se puede engranar con el primer elemento, y el miembro de alimentación de grapas se puede engranar con el segundo elemento, en cuyo caso el conjunto del mango está adaptado para proporcionar un movimiento del primer elemento y el segundo elemento, en cuyo caso dicho movimiento está dirigido de forma substancialmente paralela y en sentido opuesto.
Una de las ventajas del presente invento es que proporciona un aplicador de grapas que posee conjuntos modulares, lo que permite que la sección del conjunto del mango pueda ser reutilizada tantas veces como sea necesario con cartuchos aplicadores de grapas adaptados para conectarse con el conjunto. Una ventaja adicional del presente invento es que dichos cartuchos aplicadores de grapas o módulos están adaptados de tal modo que tanto los cartuchos que contienen un número distinto de grapas como los cartuchos que contienen grapas de diferentes tamaños, pueden ser utilizados con el mismo conjunto del mango.
Breve descripción de las figuras
Se presenta a continuación una descripción detallada de las realizaciones preferidas para el presente invento, con referencia a los dibujos adjuntos, en los que:
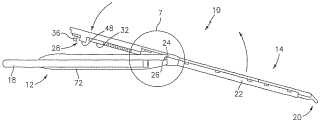
La figura 1 es una vista en planta de un aplicador automático de grapas quirúrgicas de acuerdo con el presente invento;
La figura 2 es una vista lateral de un aplicador automático de grapas quirúrgicas de acuerdo con el presente invento;
Las figuras 3, 4 y 5 son una vista inferior, una vista lateral y una vista en planta de un aplicador automático de grapas quirúrgicas ensamblado de acuerdo con el presente invento;
Las figuras 6 y 7 ilustran el conjunto para la conexión y el método para la conexión del conjunto de aplicación de las grapas del presente invento al conjunto del mango del presente invento;
Las figuras 8, 9 y 10 ilustran un mecanismo de engranaje del aplicador automático de grapas quirúrgicas del presente invento;
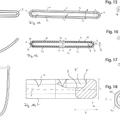
Las figuras 11, 12, 12a y 13 ilustran una estructura de liberación del mecanismo de enganche de acuerdo con el presente invento;
Las figuras 14, 15 y 16 ilustran el funcionamiento de un aplicador automático de grapas quirúrgicas de acuerdo con el presente invento durante un movimiento de apertura de los conjuntos del mango;
Las figuras 17, 18 y 19 ilustran el funcionamiento de un aplicador de acuerdo con el presente invento durante un movimiento de cierre del conjunto del mango, y Las figuras 20 y 21 ilustran una realización preferida de un elemento de transferencia de grapas en conformidad con el presente invento.
Descripción detallada El invento se refiere a un aplicador automático de grapas quirúrgicas y, más particularmente, a un aplicador que presenta un conjunto de mango y un conjunto para la aplicación de las grapas o un cartucho montado de forma que pueda ser liberado, el cual permite que el conjunto del mango pueda ser utilizado con cartuchos subsiguientes cuando la provisión de grapas de un cartucho se ha agotado, y que además permite que el conjunto del mango pueda ser utilizado con una capacidad distinta y / o con cartuchos aplicadores de grapas de diferentes tamaños.
El presente dispositivo incluye secciones para el mango en uno de los extremos del dispositivo y mordazas para la aplicación de las grapas en el otro extremo del dispositivo. En este tipo de dispositivos, es común referirse a las secciones que se encuentran relativamente cercanas al extremo de la mordaza como secciones "distales" y a las secciones que se encuentran relativamente cercanas al extremo del mango como secciones "proximales". Es por ello que cuando dichos términos son utilizados... [Seguir leyendo]
Reivindicaciones:
1. Aplicador automático de grapas quirúrgicas (10) , que comprende:
un conjunto del mango (12) que presenta un elemento de accionamiento que causa que un primer elemento (30) se mueva secuencialmente en una dirección distal y una dirección proximal, y causa que un segundo elemento (34) se mueva secuencialmente en una dirección proximal y una dirección distal; y un conjunto aplicador de grapas (14) adaptado para asegurarse a dicho conjunto de mango (12) de forma que se pueda liberar y que tiene un elemento para el cierre de la mordaza (32) y un elemento para el suministro de grapas (36) , siendo posible engranar el elemento para el cierre de la mordaza (32) con el primer elemento (30) y siendo posible engranar el elemento para el suministro de grapas (36) con el segundo elemento (34) , caracterizado en que dicho conjunto de mango (12) está adaptado para proporcionar un movimiento substancialmente paralelo y de sentido opuesto del primer miembro (30) y del segundo miembro (34) .
2. Aparato conforme a la reivindicación 1, que comprende un conjunto para el giro dispuesto sobre el conjunto del mango (12) y el conjunto aplicador de grapas (14) para engranar dicho conjunto aplicador de grapas (14) con el conjunto de mango (12) de forma que pueda ser girado, y un conjunto de bloqueo para bloquear dicho conjunto aplicador de grapas (14) a dicho conjunto de mango (12) de forma que pueda ser liberado, en el que dicho conjunto para el giro define un punto de giro (74) en una posición separada distalmente de dicho conjunto de bloqueo.
3. Aparato conforme a la reivindicación 2, caracterizado en que dicho conjunto para el giro comprende una superficie curvada hacia el exterior (24) sobre uno de los conjuntos aplicadores de grapas (14) y el conjunto del mango (12) , y una superficie curvada hacia el interior (26) en otro de los susodichos conjuntos aplicadores de grapas (14) y el conjunto del mango (12) .
4. Aparato conforme a la reivindicación 2, caracterizado en que dicho conjunto de cierre comprende un elemento de engranaje sobre uno de los conjuntos aplicadores de grapas (14) y el conjunto del mango (12) , un elemento de engranaje en otro de los conjuntos aplicadores de grapas (14) y el conjunto del mango (12) y que se puede posicionar entre una posición de bloqueo para engranar dicho elemento de engranaje y una posición de liberación desengranada de dicho elemento de engranaje, y un elemento de liberación asociado operativamente con dicho elemento de engranaje para colocar dicho elemento de engranaje en la posición de liberación, en cuyo caso dicho elemento de engranaje está desviado hacia la posición de inicio.
5. Aparato conforme a la reivindicación 1, caracterizado en que el conjunto aplicador de grapas (14) comprende además una estructura de almacenamiento para almacenar una pluralidad de grapas (84) a lo largo de un eje longitudinal (A) de dicho conjunto aplicador de grapas (14) , y un conjunto de mordazas (20) para el cierre de una grapa (84) , caracterizado en que el elemento para el suministro de las grapas (36) está adaptado para hacer avanzar una grapa (84) desde la estructura de almacenamiento hasta las mordazas.
6. Aparato conforme a la reivindicación 5, caracterizado en que la estructura de almacenamiento define la estructura para contener una serie de grapas (84) con una primera grapa distal en una posición de inicio y una segunda grapa distal en una posición de espera situada proximalmente con respecto a dicha posición de inicio, y en cuyo caso el elemento para el suministro de las grapas (36) comprende un elemento corredera (108) montado de forma deslizable con relación al conjunto aplicador de grapas (14) y que tiene un elemento para el empuje de grapas distal y un elemento para el empuje de grapas proximal, caracterizado en que dicho elemento corredera (108) puede ser deslizado desde una posición proximal a una posición distal, y en donde el deslizamiento de dicho elemento corredera (108) desde dicha posición proximal a dicha posición distal engrana la primera grapa distal en la posición de inicio con el elemento para el engranaje de grapas distal (100) y mueve la primera grapa distal a dicho conjunto de mordazas (20) , y engrana la segunda grapa en la posición de espera con el elemento para el engranaje de grapas proximal (102) y mueve dicha segunda grapa distal desde la posición de espera hasta la posición de inicio.
7. Aparato conforme a la reivindicación 6, caracterizado en que al menos uno de los elementos para el engranaje de grapas distal (100) y el elemento para el engranaje de grapas proximal (102) posee dos brazos que presentan superficies de contacto para grapas (114) inclinadas con respecto al eje longitudinal (A) de dicho elemento corredera
(108) en un ángulo de entre aproximadamente 30° y aproximadamente 60° entre la superficie de contacto (114) y dicho eje (A) , y en donde las superficies de contacto para grapas (114) se extienden además hacia el interior una en dirección de la otra con el fin de definir un área de retención para retener un vértice de una grapa con las superficies de contacto dispuestas de tal forma que entren en contacto con dicho vértice (86) en las superficies superior, inferior y final del mismo.
8. Aparato conforme a la reivindicación 6, caracterizado en que el conjunto para la aplicación de grapas (14) comprende un primer conjunto que contiene grapas relativamente largas y un segundo conjunto que contiene grapas relativamente pequeñas, en el que la separación entre un vértice (86) de una grapa en la posición de inicio y un vértice (86) de una grapa en la posición de espera en el primer conjunto es la misma que la separación en el segundo conjunto, en cuyo caso dicho primer conjunto y dicho segundo conjunto se pueden utilizar con el mismo conjunto del mango (12) .
9. Aparato conforme a la reivindicación 1, caracterizado en que el conjunto de mango (12) comprende un cuerpo de mango (72) y al menos un elemento de mango (16, 18) montado en dicho cuerpo de mango (72) de forma que se pueda girar, en cuyo caso el movimiento de dicho elemento de mango (16, 18) con respecto a dicho cuerpo de mango (72) mueve el primer elemento (30) en dirección distal y el segundo elemento (34) en dirección proximal, y en cuyo caso el movimiento de dicho elemento del mango (16, 18) con respecto al cuerpo de mango (72) en una segunda dirección mueve el primer elemento (30) en la dirección proximal y el segundo elemento (34) en la dirección distal.
10. Aparato conforme a la reivindicación 9, caracterizado en que el conjunto de mango (12) comprende el cuerpo de mango (72) y dos elementos del mango (16, 18) montados en el cuerpo del mango (72) de forma que se puedan girar, en cuyo caso cada uno de los dos elementos del mango (16, 18) define un elemento de ranura con apertura hacia el interior (78) , en donde el primer elemento (30) comprende un carrete (38) dispuesto en la ranura con apertura hacia el interior (78) de cada uno de los dos elementos del mango (16, 18) , y en cuyo caso el giro de los dos elementos del mango (16, 18) uno en dirección del otro con respecto al elemento de cuerpo (72) mueve el carrete (38) en una dirección distal, y en cuyo caso dicho carrete (38) se puede engranar con el elemento para el cierre de la mordaza (32) del conjunto aplicador de grapas (14) .
11. Aparato conforme a la reivindicación 10, caracterizado en que el segundo elemento (32) comprende un resorte
(82) que posee una sección central en espiral y dos brazos (80) que se extienden desde dicha sección central en espiral, en cuyo caso dicho resorte (82) está colocado entre los dos elementos del mango (16, 18) con dichos brazos
(80) que se extienden distalmente desde la sección central en espiral y ponen en contacto los dos elementos del mango (16, 18) , en cuyo caso el cierre de los dos elementos del mango (16, 18) gira los dos brazos (80) , uno en dirección al otro y mueve la sección central en espiral en una dirección proximal, en cuyo caso dicha sección central en espiral está adaptada para que se pueda engranar al elemento para el suministro de grapas (36) .
12. Aparato conforme a la reivindicación 8, caracterizado en que cada una de las grapas (84) presenta una sección de vértice (86) y unas patas (88) que se extienden desde dicha sección de vértice (86) , en cuyo caso el conjunto aplicador de grapas (14) posee mordazas (92) para la aplicación de dichas grapas (84) y la estructura de almacenamiento para almacenar una serie de grapas (84) en fila con las patas (88) extendidas en dirección distal hacia las mordazas (92) , en cuyo caso dicha estructura de almacenamiento define la posición de inicio situada de forma proximal con respecto a las mordazas (92) , y la posición de espera situada de forma proximal con respecto a la posición de inicio, y el elemento para el suministro de grapas (36) montado de forma deslizable con respecto a la estructura de almacenamiento presenta el elemento para el engranaje de grapas distal (100) y el elemento para el engranaje de grapas proximal (102) , pudiendo deslizarse los elementos para el suministro de grapas (110, 102) desde la posición proximal hasta la posición distal, en cuyo caso el deslizamiento de dicho elemento para el suministro de grapas (36) desde la posición proximal hasta la posición distal engrana el elemento para el engranaje de grapas distal (100) con la primera grapa distal en la posición de inicio y engrana el elemento para el engranaje de grapas proximal (102) con la segunda grapa distal en la posición de espera y por lo tanto mueve la primera grapa distal hasta las mordazas (92) y la segunda grapa distal hasta la posición de inicio.
13. Aparato conforme a la reivindicación 12, caracterizado en que el movimiento de un elemento para el suministro de grapas (36) desde una posición distal hasta una posición proximal engrana dicho elemento para el engranaje de grapas (100) con una nueva grapa situada de forma distal en la posición de inicio, y engrana el elemento para el engranaje de grapas proximal (102) con otra segunda grapa situada de forma distal a la posición de espera.
14. Aparato conforme a la reivindicación 12, caracterizado en que la separación entre el elemento para el engranaje de grapas distal (100) y el elemento para el engranaje de grapas proximal (102) es la misma que la separación entre un vértice de grapa (86) en la posición de inicio y un vértice de grapa (86) en la posición de espera.
15. Aparato conforme a la reivindicación 14, caracterizado en que la separación entre un vértice de grapa (86) en las mordazas (92) y un vértice de grapa (86) en la posición de inicio es la misma que la separación entre un vértice de grapa (86) en la posición de inicio y dicho vértice de grapa (86) en la posición de espera.
16. Aparato conforme a la reivindicación 12, en donde al menos uno de los elementos para el engranaje de grapas distal (100) y el elemento para el engranaje de grapas proximal (102) comprende dos brazos que tienen superficies
de contacto para grapas (114) inclinadas con respecto a un eje longitudinal (A) de dicho elemento de corredera (108) con un ángulo de entre aproximadamente 30° y aproximadamente 60° entre la superficie de contacto (114) y dicho eje (A) , y en cuyo caso las superficies de contacto para grapas (114) se extienden además hacia el interior una en dirección de la otra con el fin de definir una zona de retención para sujetar un vértice (86) de una grapa con las superficies de contacto (114) dispuestas para ponerse en contacto con dicho vértice (86) en las superficies superior, inferior y final del mismo.
REFERENCIAS CITADAS EN LA DESCRIPCIÓN
La lista de referencias citada por el solicitante lo es solamente para utilidad del lector, no formando parte de los documentos de patente europeos. Aún cuando las referencias han sido cuidadosamente recopiladas, no pueden excluirse errores u omisiones y la OEP rechaza toda responsabilidad a este respecto.
Documentos de patente citados en la descripción
• US 4296751 A [0003] • US 6099537 A [0006]
• EP 0793944 A1 [0005] • EP 0680729 A1 [0007]
Patentes similares o relacionadas:
Pieza de boca para un instrumento quirúrgico de vástago tubular, del 13 de Mayo de 2020, de AESCULAP AG: Pieza de boca para un instrumento quirúrgico de vástago tubular con un componente de sujeción , una primera rama con una primera zona de actuación […]
Instrumento médico de vástago con una placa de apoyo / puente en el riel de retención, del 6 de Mayo de 2020, de AESCULAP AG: Instrumento médico de vástago , con una cabeza de instrumento que presenta una pieza de boca con dos ramas de pieza de boca que pueden moverse a […]
Dispositivos para aplicar pinzas quirúrgicas, del 27 de Noviembre de 2019, de Endodynamix, Inc: Un aparato de aplicación de pinzas quirúrgicas, que comprende: una carcasa ; un mecanismo impulsor que incluye una estructura de soporte […]
Dispositivo de pinzado de tejidos, del 30 de Octubre de 2019, de BOSTON SCIENTIFIC SCIMED, INC.: Un dispositivo de pinzado de tejidos, que comprende: un miembro flexible dimensionado para inserción a través de un canal […]
Instrumento médico de tipo vástago con diferentes distancias de posición de almacenamiento mediante elementos de arrastre de grapas y pestañas de retención para grapas, del 2 de Octubre de 2019, de AESCULAP AG: Instrumento médico de tipo vástago con un cabezal de instrumento para aplicar grapas , en el que el cabezal de instrumento puede unirse por medio de un vástago […]
 Clip quirúrgico, del 25 de Septiembre de 2019, de AESCULAP AG: Clip quirúrgico para un aplicador de clips quirúrgico con al menos una pareja de brazos de clip (2a, 2b, 2c, 2d), donde cada brazo de clip (2a, 2b, […]
Clip quirúrgico, del 25 de Septiembre de 2019, de AESCULAP AG: Clip quirúrgico para un aplicador de clips quirúrgico con al menos una pareja de brazos de clip (2a, 2b, 2c, 2d), donde cada brazo de clip (2a, 2b, […]
Dispositivo de pinzado de tejidos, del 18 de Septiembre de 2019, de BOSTON SCIENTIFIC SCIMED, INC.: Un aparato de pinzado de tejido que comprende: una pinza ; una cápsula , en la que un extremo proximal de la pinza se recibe dentro de la […]
Dispositivo de plicatura con elemento de fijación lineal conformable para su uso en el tratamiento de anuloplastia de plicatura directa de la regurgitación de la válvula mitral, del 17 de Abril de 2019, de Cardinal Health Switzerland 515 GmbH: Un sistema para el tratamiento de la regurgitación de la válvula mitral a través de la anuloplastia de plicatura directa de un paciente que comprende: un dispositivo de plicatura […]