Un aparato de llenado y envasado de bolsas que comprende: una cadena sin fin (1) que se mueve a lo largo de una pista anular con forma de pista de carreras y una pluralidad de pares de pinzas (2) que están dispuestos en dicha cadena sin fin (1) a intervalos iguales a lo largo de la longitud de dicha cadena sin fin (1) y que se mueven conjuntamente con dicha cadena sin fin (1),
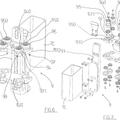
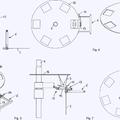
y además un dispositivo (3) de suministro de bolsas, un dispositivo (4) de apertura de boca de bolsa, una dispositivo (5) de llenado y un dispositivo (6) de sellado que están, entre otros, dispuestos a lo largo de la pista anular; en el que dicho dispositivo (5) de llenado tiene una pluralidad de tolvas (41) ascendentes/descendentes que están dispuestas por encima de una sección en forma de arco de dicha pista anular y se mueven, en sincronismo con dichas pinzas (2), a lo largo de su propia pista circular que es concéntrica con dicha una sección de dichas secciones en forma de arco, y durante un movimiento de dichas pinzas (2), se realiza una operación de envasado que incluye, entre otras cosas, el suministro de bolsas (9) a dichas pinzas (2) por dicho dispositivo (3) de suministro de bolsas, la sujeción de los bordes de las bolsas (9) por dichas pinzas (2), la apertura de una boca de bolsa por dicho dispositivo (4) de apertura de boca de bolsa, el llenado de la bolsa (9) con producto por cada una de dichas tolvas (41) de dicho dispositivo (5) de llenado, y el sellado de la boca de bolsa por dicho dispositivo de sellado (6); caracterizado porque un miembro (42) de guía que está hueco por dentro y que guía al producto que cae de dicha tolva (41) en el interior de la bolsa (9), está dispuesto debajo de cada una de dichas tolvas (41); dicho miembro (42) de guía está compuesto por un par de bastidores (43, 44) de guía, que están dispuestos enfrentados uno contra otro y que son capaces de abrirse y cerrarse, y se mueve y se eleva/baja conjuntamente con cada una de dichas tolvas (41); y cuando dicho par de bastidores de guía (43, 44) se cierran, dicho miembro (42) de guía se estrecha en su parte inferior y un extremo inferior del mismo puede insertarse así dentro de la boca de bolsa, y cuando se abren dichos bastidores (43, 44) de guía, dicho miembro (42) de guía se ensancha en su extremo inferior; se dispone de unos medios de accionamiento (54) de bastidor de guía que abren y cierran dicho par de bastidores de guía; dicho par de bastidores (43, 44) de guía se abren/se cierran repetidamente por dichos medios de accionamiento de bastidor de guía en una región de no llenado (B) en forma de arco de una pista circular de dicho miembro (42) de guía; y un miembro receptor (40) que recibe un producto que cae desde dicho miembro (42) de guía está dispuesto en una posición directamente por debajo de dicho miembro (42) de guía en dicha región de no llenado (B)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09000036.
B65B1/06TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 1/00 Embalaje de materiales sólidos fluyentes, p. ej. polvos, materiales fibrosos granulares o a granel, masas a granel de pequeños objetos, en receptáculos o recipientes individuales, p. ej. sacos, bolsas, cajas, cartones, latas o tarros. › por gravedad.
B65B39/14B65B […] › B65B 39/00 Boquillas, embudos o guías para introducir objetos o materiales en los receptáculos o los embalajes. › que pueden desplazarse con el receptáculo o el embalaje.
B65B57/00B65B […] › Dispositivos de control automático, de verificación, de alarma, o de seguridad (posicionado del material de envoltura o formando receptáculo alimentado a partir de bobinas B65B 41/18).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
La presente invención se refiere a un aparato de llenado y envasado de bolsas en el que una pluralidad de pinzas se mueven continua o intermitentemente a lo largo de una pista anular en forma de pista de carreras y se realizan, en el proceso de este movimiento de las pinzas, operaciones de envasado que, entre otras, incluyen suministro de bolsas a las pinzas, sujeción de los bordes de las bolsas por las pinzas, apertura de la boca de bolsa, llenado de bolsas con producto y sellado de la boca de bolsa. 2. Descripción de la Técnica Relacionada La patente norteamericana número 4.509.313 describe un aparato de llenado y envasado de bolsas y este aparato de llenado y envasado de bolsas comprende una cadena sin fin que se mueve continuamente a lo largo de una pista anular con forma de pista de carreras y una pluralidad de pares de pinzas que están dispuestos a intervalos iguales a lo largo de la longitud de la cadena sin fin y que se mueven conjuntamente con la cadena sin fin, y además incluye un dispositivo de suministro de bolsas, un dispositivo de apertura de boca de bolsa, una dispositivo de llenado y un dispositivo de sellado que están, entre otros, dispuestos a lo largo de la pista anular. El dispositivo de suministro de bolsas y el dispositivo de apertura de boca de bolsa están dispuestos a lo largo de una sección lineal de la pista anular, mientras que el dispositivo de llenado incluye una pluralidad de tolvas ascendentes/descendentes que están dispuestas por encima de una sección semicircular de la pista anular (estando la sección semicircular sobre el lado aguas abajo de la sección lineal) y se mueven a lo largo de su propia pista circular que es concéntrica con la sección en forma de arco de la pista anular; y además el dispositivo de sellado está dispuesto a lo largo de la otra sección lineal de la pista anular. En este aparato de llenado y envasado de bolsas, durante el proceso de movimiento de las pinzas se realizan operaciones de envasado que incluyen suministro de bolsas a las pinzas por el dispositivo de suministro de bolsas, sujeción de los bordes de las bolsas por las pinzas, apertura de la boca de bolsa por el dispositivo de apertura de boca de bolsa, llenado de bolsas con producto mediante las tolvas del dispositivo de llenado, y sellado de la boca de bolsa por el dispositivo de sellado. Las tolvas (y, en particular, sus aberturas extremas inferiores) están dispuestas a intervalos equiangulares (los mismos intervalos equiangulares que entre las pinzas cuándo éstas se están desplazando sobre las secciones semicirculares de la pista anular), y se mueven así de una manera giratoria sincronizadas con las pinzas al tiempo que éstas están girando sobre la pista circular a lo largo de las secciones semicirculares de la pista anular. Durante el periodo de este movimiento giratorio, las tolvas caen hacia abajo desde una posición directamente encima de las bolsas sujetas por las pinzas (siendo tal posición una posición de espera hasta una posición de llenado (en donde las bolsas se llenan con producto), sus aberturas extremas inferiores se insertan dentro de las bocas de las bolsas, el producto se introduce dentro de la tolva y posteriormente cae desde las aberturas extremas inferiores dentro de las bolsas, y las tolvas son subidas y sus aberturas extremas inferiores son retiradas de las bocas de las bolsas, y las tolvas vuelven a las posiciones de espera. La región semicircular de la pista circular de las tolvas en la cual tiene lugar el paso de llenado de producto se denomina "región de llenado", mientras que la otra región semicircular en donde la pista circular de las tolvas diverge de la pista anular de las pinzas (en donde las tolvas y las pinzas no están en movimiento giratorio sincronizado) se denomina la "región de no llenado", y en esta región de no llenado las tolvas están en las posiciones de espera. El aparato de llenado y envasado de bolsas descrito anteriormente es capaz de realizar el llenado y envasado de bolsas con alta productividad; sin embargo, en casos en los que las aberturas extremas inferiores de las tolvas se ajustan a un tamaño relativamente pequeño para coincidir con el tamaño de las bocas de bolsa, el producto puede obturar fácilmente la tolva, y el aparato no tiene medios para detectar o desatascar tal obturación si ésta ocurre. Por el contrario, en el dispositivo de llenado descrito en la patente japonesa número 3.342.262 un par de bastidores de cocodrilo que son capaces de abrirse y cerrarse a lo largo y un cilindro de aire que abre y cierra las bastidores de cocodrilo están dispuestos en la parte inferior de la tolva, de modo que los extremos inferiores de los bastidores de cocodrilo cerrados se inserten dentro de la boca de bolsa y luego se abran, introduciendo así el producto dentro de la bolsa mediante la tolva y los bastidores de cocodrilo. Con este tipo de bastidor de cocodrilo de apertura/cierre dispuesto en la parte inferior de la tolva, no hay necesidad de hacer la abertura extrema inferior de la tolva excesivamente pequeña y, como resultado, es posible impedir la obturación de producto dentro de la tolva; y también, mediante la apertura y cierre repetidos de los bastidores de cocodrilo insertados en las bocas de las bolsas, se promueve la acción del producto que cae dentro de la bolsa, y por ello es posible impedir la obturación de producto en el bastidor de cocodrilo (incluso si tuviera lugar una obturación temporal, ésta puede desatascarse automáticamente. Sin embargo, aun cuando la tecnología de la patente japonesa número 3.342.262 pudiera aplicarse "como tal" a un 2 E09000036 29-12-2011 aparato de llenado y envasado de bolsas del tipo presentado en la patente norteamericana número 4.509.313, aún no resulta posible tener tiempo suficiente para permitir que los bastidores de cocodrilo insertados en la boca de las bolsas se abran y se cierren; y aparece un problema en el que si se tiene tiempo suficiente, entonces se degrada la ventaja original de la alta productividad. Por otro lado, la patente japonesa número 2.745.203 describe un método para detectar la obturación en una tolva por medio de sensores de detección o similares que están dispuestos en la porción superior de la tolva. Aunque la patente japonesa número 2.745.203 no expresa lo que se ha de hacer después de detectar la obturación en la tolva, en el caso de que se detecte la obturación, típicamente se detiene de manera inmediata el funcionamiento del aparato de envasado, de modo que la obturación se desatasque manualmente, y posteriormente se vuelve a arrancar el funcionamiento del aparato de envasado. Sin embargo, en el aparato de llenado y envasado de bolsas del tipo descrito en la patente norteamericana número 4.509.313 la detención del funcionamiento del aparato de envasado cada vez que se detecta la obturación en una de la pluralidad de tolvas degradaría la ventaja original de la alta productividad. BREVE SUMARIO DE LA INVENCIÓN El objeto primario de la presente invención es proporcionar un aparato de llenado y envasado de bolsas que desatasque automáticamente la obturación del producto que se ha de envasar sin disminuir la productividad en el caso de que la obturación tenga lugar en tolvas del aparato de llenado y envasado de bolsas que tiene una pista en forma de pista de carreras. Otro objeto de la presente invención es proporcionar un aparato de llenado y envasado de bolsas que esté controlado de modo que la productividad no resulte perjudicada ni siquiera cuando se detecta obturación en las tolvas, y que tal cosa se realice sin detener (inmediatamente) el funcionamiento del aparato de envasado. Los objetos antes descritos se logran en un aparato de llenado y envasado de bolsas que comprende: una cadena sin fin que se desplaza a lo largo de una pista anular en forma de pista de carreras, y una pluralidad de pares de pinzas que están dispuestos en la cadena sin fin a intervalos iguales a lo largo de un tramo de la cadena sin fin y que se mueven conjuntamente con la cadena sin fin, y además un dispositivo de suministro de bolsas, un dispositivo de apertura de boca de bolsa, un dispositivo de llenado y una dispositivo de sellado que están, entre otros, dispuestos a lo largo de la pista anular; en donde el dispositivo de llenado tiene una pluralidad de tolvas ascendentes/descendentes que están dispuestas por encima de las secciones en forma de arco de la pista anular y que se mueven, sincronizadas con las pinzas, a lo largo de su propia pista circular, la cual es concéntrica con la de las secciones en forma de arco, y durante un movimiento de las pinzas, se realiza una operación de envasado que incluye, entre otras cosas, el suministro de bolsas a las pinzas por el dispositivo de suministro de bolsas, la sujeción de los bordes de las bolsas por las pinzas, la apertura de una boca de bolsa por el dispositivo de apertura de... [Seguir leyendo]
Reivindicaciones:
1. Un aparato de llenado y envasado de bolsas que comprende: una cadena sin fin (1) que se mueve a lo largo de una pista anular con forma de pista de carreras y una pluralidad de pares de pinzas (2) que están dispuestos en dicha cadena sin fin (1) a intervalos iguales a lo largo de la longitud de dicha cadena sin fin (1) y que se mueven conjuntamente con dicha cadena sin fin (1), y además un dispositivo (3) de suministro de bolsas, un dispositivo (4) de apertura de boca de bolsa, una dispositivo (5) de llenado y un dispositivo (6) de sellado que están, entre otros, dispuestos a lo largo de la pista anular; en el que dicho dispositivo (5) de llenado tiene una pluralidad de tolvas (41) ascendentes/descendentes que están dispuestas por encima de una sección en forma de arco de dicha pista anular y se mueven, en sincronismo con dichas pinzas (2), a lo largo de su propia pista circular que es concéntrica con dicha una sección de dichas secciones en forma de arco, y durante un movimiento de dichas pinzas (2), se realiza una operación de envasado que incluye, entre otras cosas, el suministro de bolsas (9) a dichas pinzas (2) por dicho dispositivo (3) de suministro de bolsas, la sujeción de los bordes de las bolsas (9) por dichas pinzas (2), la apertura de una boca de bolsa por dicho dispositivo (4) de apertura de boca de bolsa, el llenado de la bolsa (9) con producto por cada una de dichas tolvas (41) de dicho dispositivo (5) de llenado, y el sellado de la boca de bolsa por dicho dispositivo de sellado (6); caracterizado porque E09000036 29-12-2011 un miembro (42) de guía que está hueco por dentro y que guía al producto que cae de dicha tolva (41) en el interior de la bolsa (9), está dispuesto debajo de cada una de dichas tolvas (41); dicho miembro (42) de guía está compuesto por un par de bastidores (43, 44) de guía, que están dispuestos enfrentados uno contra otro y que son capaces de abrirse y cerrarse, y se mueve y se eleva/baja conjuntamente con cada una de dichas tolvas (41); y cuando dicho par de bastidores de guía (43, 44) se cierran, dicho miembro (42) de guía se estrecha en su parte inferior y un extremo inferior del mismo puede insertarse así dentro de la boca de bolsa, y cuando se abren dichos bastidores (43, 44) de guía, dicho miembro (42) de guía se ensancha en su extremo inferior; se dispone de unos medios de accionamiento (54) de bastidor de guía que abren y cierran dicho par de bastidores de guía; dicho par de bastidores (43, 44) de guía se abren/se cierran repetidamente por dichos medios de accionamiento de bastidor de guía en una región de no llenado (B) en forma de arco de una pista circular de dicho miembro (42) de guía; y un miembro receptor (40) que recibe un producto que cae desde dicho miembro (42) de guía está dispuesto en una posición directamente por debajo de dicho miembro (42) de guía en dicha región de no llenado (B). 2. El aparato de llenado y envasado de bolsas según la reivindicación 1, en el que dicho aparato de llenado y envasado de bolsas comprende además: un primer sensor de detección (57) que detecta la presencia de producto dentro de dicho miembro (42) de guía inmediatamente después del llenado de la bolsa (9) con producto, y una unidad de control (61), que determina la presencia de una obturación de producto en un miembro (42) de guía basándose en señales de detección procedentes de dicho primer sensor de detección (57) y que controla las acciones de dichos medios de accionamiento de bastidor de guía; y después de la determinación de que está presente una obturación de producto en un miembro (42) de guía, dicha unidad de control (61) hace que dichos medios de accionamiento (54) de miembro de guía realicen una acción en la que dicho par de bastidores (43, 44) de guía del miembro (42) de guía determinado como obturado con producto se abra y se cierre repetidamente en dicha región de no llenado (B). 3. El aparato de llenado y envasado de bolsas según la reivindicación 1, en el que dicho aparato de llenado y envasado de bolsas comprende además: un primer sensor de detección (57) que detecta la presencia de producto dentro de dicho miembro (42) de guía inmediatamente después del llenado de la bolsa (9) con producto, un dispositivo (7) de expulsión de bolsa mala que, en una posición diferente con respecto a una posición de expulsión de producto bueno, abre dicha pinza (2) y expulsa de dicho aparato de llenado y envasado de bolsas una 11 bolsa que han estado sujeta por dichas pinzas (2), y una unidad de control (61), que determina la presencia de una obturación de producto en un miembro (42) de guía basándose en señales de detección procedentes de dicho primer sensor de detección (57) y que controla las acciones de dicho dispositivo (7) de expulsión de bolsas malas; y después de determinar la presencia de una obturación de producto en un miembro (42) de guía, dicha unidad de control (61) hace que dicho dispositivo (7) de expulsión de bolsa mala realice una acción para abrir una pinza (2) que se corresponde con un miembro (42) de guía determinado como obturado con producto. 4. El aparato de llenado y envasado de bolsas según la reivindicación 1, en el que dicho aparato de llenado y envasado de bolsas comprende además: un sensor de detección (58) que detecta la presencia de producto dentro de dicho miembro (42) de guía inmediatamente antes del llenado de la bolsa (9) con producto, y una unidad de control (61) que determina la presencia de una obturación de producto basándose en señales de detección procedentes de dicho sensor de detección (58) y que controla las acciones de dicho dispositivo (5) de llenado; y después de determinar la presencia de una obturación de producto en un miembro (42) de guía, dicha unidad de control (61) hace que dicho dispositivo (5) de llenado detenga el suministro de producto a una tolva (41) que se corresponde con un miembro (42) de guía determinado como obturado con producto. 5. El aparato de llenado y envasado de bolsas según la reivindicación 1, en el que dicho aparato de llenado y envasado de bolsas comprende además: un primer sensor de detección (57) que detecta la presencia de producto dentro de dicho miembro (42) de guía inmediatamente después del llenado de la bolsa (9) con producto, un dispositivo (7) de expulsión de bolsa mala que, en una posición diferente con respecto a una posición de expulsión de producto bueno, abre dicha pinza (2) y expulsa de dicho aparato de llenado y envasado de bolsas unas bolsas que han estado sujetas por dichas pinzas (2), y una unidad de control (61) que determina la presencia de una obturación de producto en un miembro (42) de guía basándose en señales de detección procedentes de dicho primer sensor de detección (57) y que controla las acciones de dichos medios de accionamiento (54) de bastidor de guía y dicho dispositivo (7) de expulsión de bolsas malas; y después de determinar la presencia de una obturación de producto en un miembro (42) de guía, dicha unidad de control (61) hace que dichos medios de accionamiento (54) de bastidor de guía realicen una acción en la que un par de bastidores (43, 44) de guía de dicho miembro (42) de guía determinado como obturado con producto se abren y se cierran repetidamente en dicha región de no llenado (B), y hace que dicho dispositivo (7) de expulsión de bolsa mala realice una acción para abrir una pinza (2) que se corresponde con un miembro (42) de guía determinado como obturado con producto. 6. El aparato de llenado y envasado de bolsas según la reivindicación 1, en el que dicho aparato de llenado y envasado de bolsas comprende además: un primer sensor de detección (57) que detecta la presencia de producto dentro de dicho miembro (42) de guía inmediatamente después del llenado de la bolsa con producto, un segundo sensor de detección (58) que detecta la presencia de producto dentro de dicho miembro (42) de guía inmediatamente antes del llenado de la bolsa con producto, y una unidad de control (61) que determina la presencia de una obturación de producto basándose en señales de detección procedentes de dicho primer sensor de detección (57) y así controla las acciones de dichos medios de accionamiento (54) de bastidor de guía, y determina la presencia la presencia de una obturación de producto basándose en señales de detección procedentes de dicho segundo sensor de detección (58) y así controla las acciones de dicho dispositivo (5) de llenado; y después de determinar la presencia de una obturación de producto basándose en señales de detección procedentes 12 E09000036 29-12-2011 de dicho primer sensor de detección (57), dicha unidad de control (61) hace que dichos medios de accionamiento (54) de bastidor de guía realicen una acción en la que un par de bastidores (43, 44) de guía de un miembro (42) de guía determinado como obturado con producto se abren y se cierran repetidamente en dicha región de no llenado (B), y después de determinar la presencia de una obturación de producto basándose en señales de detección procedentes de dicho segundo sensor de detección (58), dicha unidad de control (61) hace que dicho dispositivo (5) de llenado detenga el suministro de producto a una tolva (41) que se corresponde con un miembro (42) de guía determinado como obturado con producto. 7. El aparato de llenado y envasado de bolsas según la reivindicación 4 o 6, en el que, tras determinar que un miembro (42) de guía específico está obturado con producto un número de veces predeterminado en una fila basándose en señales de detección procedentes de dicho segundo sensor de detección (58), dicha unidad de control (61) hace que dicho dispositivo (3) de suministro de bolsas detenga el suministro de bolsas (9) a una pinza (2) que se corresponde con el miembro (42) de guía. 8. El aparato de llenado y envasado de bolsas según la reivindicación 4 o 6, en el que, tras determinar que un miembro (42) de guía específico está obturado con producto un número de veces predeterminado en una fila basándose en señales de detección procedentes de dicho segundo sensor de detección (58), dicha unidad de control (61) detiene el funcionamiento de dicho aparato de llenado y envasado de bolsas. 13 E09000036 29-12-2011 14 E09000036 29-12-2011 E09000036 29-12-2011 16 E09000036 29-12-2011 17 E09000036 29-12-2011 18 E09000036 29-12-2011 19 E09000036 29-12-2011
Patentes similares o relacionadas:
Envasado de chips comestibles de aperitivo, del 15 de Julio de 2020, de Frito-Lay Trading Company GmbH (100.0%): Un procedimiento para envasar chips comestibles de aperitivo , comprendiendo dicho procedimiento las siguientes etapas:
a) proporcionar […]
Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…]
Dispositivo y procedimiento para transportar y llenar sacos, del 14 de Agosto de 2019, de Statec Binder GmbH: Un dispositivo para transportar y llenar sacos , preferentemente sacos de boca abierta, que comprende un dispositivo de llenado giratorio alrededor […]
Aparato y procedimiento para transportar y llenar sacos, del 31 de Julio de 2019, de Statec Binder GmbH: Dispositivo para transportar y llenar sacos , preferentemente sacos abiertos, que comprende un dispositivo de llenado giratorio alrededor de un eje de rotación con […]
Un aparato para la transferencia de artículos farmacéuticos de una máquina de contar al interior de recipientes que avanzan continuamente, del 15 de Mayo de 2019, de MARCHESINI GROUP S.P.A.: Un aparato (D) para transferir artículos farmacéuticos de al menos una máquina de contar (MC) al interior de los recipientes (C) que avanzan en modo continuo a lo largo […]
Un aparato para introducir artículos en envases, del 26 de Abril de 2017, de MARCHESINI GROUP S.P.A.: Un aparato para la introducción de artículos en envases, comprendiendo los artículos productos deformables (B), tales como por ejemplo envases tipo blíster (B), y hojas informativas […]
Procedimiento para llenar y soldar bolsas de lámina y un dispositivo de llenado y de soldadura para el mismo, del 8 de Febrero de 2017, de INDAG GESELLSCHAFT FUR INDUSTRIEBEDARF MBH & CO. BETRIEBS KG: Procedimiento para llenar y soldar bolsas de lámina , en el que varias bolsas de lámina recogidas una detrás de otra […]
Dispositivo para introducir un medio en un recipiente, del 4 de Mayo de 2016, de INDAG GESELLSCHAFT FUR INDUSTRIEBEDARF MBH & CO. BETRIEBS KG: Dispositivo para introducir un medio en un recipiente , por ejemplo una bolsa flexible, con un carrusel giratorio y una o varias estaciones de tratamiento […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…]
Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…] Aparato y procedimiento para transportar y llenar sacos, del 31 de Julio de 2019, de Statec Binder GmbH: Dispositivo para transportar y llenar sacos , preferentemente sacos abiertos, que comprende un dispositivo de llenado giratorio alrededor de un eje de rotación con […]
Aparato y procedimiento para transportar y llenar sacos, del 31 de Julio de 2019, de Statec Binder GmbH: Dispositivo para transportar y llenar sacos , preferentemente sacos abiertos, que comprende un dispositivo de llenado giratorio alrededor de un eje de rotación con […]