UN DISPOSITIVO GPS.
Un aparato que comprende: un circuito de sincronizacion de tiempo (325) dispuesto para proporcionar datos de tiempo para un estimador de ubicacion (319),
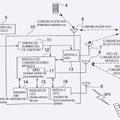
disponiendose el circuito (325) para, en un primer modo, proporcionar los datos de tiempo dependiendo de al menos una senal de posicionamiento satelital recibida por un receptor del sistema de posicionamiento (303) sin la asistencia de una estimacion de ubicacion y para, en un segundo modo, proporcionar los datos de tiempo dependiendo de al menos una senal de posicionamiento satelital recibida por un receptor del sistema de posicionamiento (303) con la asistencia de una estimacion de ubicacion, disponiendose el circuito de sincronizacion de tiempo (325) para conmutar entre el primer y segundo modos de operacion dependiendo de si el circuito de sincronizacion de tiempo (325) esta proporcionando los datos de tiempo
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2005/001926.
Solicitante: NOKIA CORPORATION.
Nacionalidad solicitante: Finlandia.
Dirección: KEILALAHDENTIE 4 02150 ESPOO FINLANDIA.
Inventor/es: SYRJARINNE,JARI, ALANEN,KIMMO.
Fecha de Publicación: .
Fecha Solicitud PCT: 20 de Mayo de 2005.
Clasificación Internacional de Patentes:
- G01S19/25 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › empleando datos de navegación asistida recibidos de un elemento cooperante, p. ej. GPS asistido.
- G01S19/42 G01S 19/00 […] › Determinación de la posición.
Clasificación PCT:
- G01S19/25 G01S 19/00 […] › empleando datos de navegación asistida recibidos de un elemento cooperante, p. ej. GPS asistido.
Clasificación antigua:
- G01S5/14 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania.
PDF original: ES-2361601_T3.pdf
Fragmento de la descripción:
40
45
50
Campo de la Invención
La presente invención se refiere a un sistema de posicionamiento satelital, en particular pero no exclusivamente para su uso en un sistema de comunicaciones y sincronizar una señal de ubicación en un sistema inalámbrico celular.
Antecedentes de la Invención
Las redes de comunicación celular inalámbricas y su operación son en general bastante conocidas. En un sistema de este tipo el área cubierta por la red se divide en células. Cada célula está provista con una estación base, que se dispone para comunicarse con una pluralidad de estaciones móviles u otro equipo de usuario en una célula asociada con una estación base.
En estos sistemas conocidos, es posible ubicar una estación móvil con referencia a estaciones base, y por lo tanto es posible ubicar una estación móvil dentro del intervalo de transmisión operativo de una estación base.
Como también se sabe la información de ubicación adicional puede determinarse midiendo el tiempo entre la transmisión y la recepción de una señal entre una estación móvil y una estación base conocida o transmisor. Utilizando tales procedimientos de Tiempo de Llegada (TOA) con señales transmitidas por estaciones base es posible ubicar una estación móvil a decenas de metros.
Utilizando la estación base para transmitir señales de tiempo y utilizar estas señales para determinar una estimación de ubicación produce una estimación que contiene varios errores y problemas potenciales. Uno de los problemas principales son las muchas trayectorias diferentes que pueden tomar las transmisiones desde la estación base hasta la estación móvil. La trayectoria puede ser directa, lo que proporciona una estimación precisa de la distancia entre las estaciones base y móvil o la trayectoria puede difractarse o reflejarse mediante fenómenos artificiales o naturales tales como edificios, grandes vehículos y colinas. Estas trayectorias indirectas no reflejan la distancia real entre la estación base y la estación móvil y por lo tanto, producen errores de estimación de ubicación. Estas trayectorias de señal difractada y reflejada ocurren más frecuentemente en entornos construidos y urbanos, degradando de esta manera las estimaciones de la ubicación de la estación base más precisas debido a la densidad creciente de estaciones base.
Un desarrollo separado en la estimación de la ubicación ha sido el desarrollo de un sistema de posicionamiento global satelital (GPS) que posibilita que un receptor GPS ubique con precisión su ubicación dentro de algunos metros midiendo las diferencias de tiempo entre las señales recibidas de los satélites que orbitan la tierra. El sistema GPS se basa tanto en el transmisor (los satélites orbitantes) como en el receptor para tener conocimiento preciso de una señal de secuencia de tiempo transmitida de modo que puede realizarse una estimación precisa de la ubicación del receptor.
Como se conoce en la técnica, los satélites orbitantes GPS están sincronizados con precisión transportando cada uno un reloj atómico preciso bastante estable. Adicionalmente, la constelación de satélites se controla mediante el control de las estaciones en tierra y cualquier error de tiempo detectado se corrige de forma eficaz.
Puesto que el coste de suministrar cada receptor GPS con un oscilador de reloj preciso y estable, tal como, un reloj atómico es prohibitivo, el receptor GPS típico determina una secuencia de tiempo de GPS precisa comparando al menos cuatro señales de tiempo de GPS separadas recibidas a partir de al menos cuatro satélites diferentes. Estos satélites se utilizan tanto para sincronizar con precisión el reloj receptor como para proporcionar una estimación precisa de la ubicación de la señal.
Como se sabe en la técnica, una secuencia de sincronización de tiempo puede realizarse recibiendo la señal de la Hora de la Semana (ToW) transmitida por cada satélite GPS. La señal ToW se transmite una vez por subtrama de GPS, en otras palabras exactamente cada seis segundos. La detección de la señal ToW depende en gran medida de la potencia recibida de la señal, y por debajo de un cierto umbral es imposible decodificar los bits de información que se envían para conformar la señal ToW. Adicionalmente, el procesamiento de la señal ToW toma una cantidad importante del tiempo de procesamiento, lo que tiene un impacto negativo en el consumo de energía.
La velocidad para producir una secuencia de sincronización de tiempo (y también, por lo tanto, la estimación de ubicación) en la que la señal recibida está próxima al umbral de potencia recibida puede mejorarse en algunas situaciones almacenando una estimación de ubicación previamente determinada y utilizando esta estimación como un valor a priori para limitar la “ventana de búsqueda” para la secuencia de sincronización de tiempo.
Estos procedimientos se basan en la impresión de tiempo exacta de las estimaciones de ubicación almacenadas, y en descartar las estimaciones de ubicación más antiguas que un valor predefinido. Esto evita que la secuencia de sincronización de tiempo comience su búsqueda desde una ventaja de búsqueda de ubicación imprecisa.
Estos procedimientos tienen una ventaja cuando las ubicaciones almacenadas antiguas no son ubicaciones de inicio imprecisas. Los procedimientos conocidos simplemente descartan las estimaciones de ubicación y requieren que el sistema reinicie una secuencia de sincronización de tiempo nueva, con sus consecuentes costes de procesamiento y de energía.
La Patente de Estados Unidos 6.075.987 describe un procedimiento para determinar la posición de un terminal de usuario que utiliza satélites del sistema de posicionamiento global (GPS), transmitiendo cada uno de los satélites GPS una señal que contiene información indicativa de los parámetros orbitales del satélite GPS respectivo.
Sumario de la Invención
Un objeto de las realizaciones de la presente invención es solucionar o parcialmente mitigar uno o más de estos problemas descritos anteriormente.
Se proporciona, de acuerdo con la presente invención un dispositivo de posicionamiento satelital que comprende: un circuito de sincronización de tiempo dispuesto para proporcionar datos de tiempo para un estimador de ubicación, disponiéndose el circuito para, en un primer modo, proporcionar datos de tiempo dependiendo de al menos una señal de posicionamiento satelital recibida por un receptor de posicionamiento satelital sin la asistencia de una estimación de ubicación y, en un segundo modo, proporcionar datos de tiempo dependiendo de al menos una señal de posicionamiento satelital recibida por un receptor de posicionamiento satelital con la asistenta de una estimación de ubicación, disponiéndose el circuito de sincronización de tiempo para conmutar entre el primer y segundo modos de operación dependiendo de si el circuito de sincronización de tiempo está proporcionando los datos de tiempo.
El circuito de sincronización de tiempo se dispone además preferentemente para conmutar desde el segundo modo hasta el primer modo dependiendo de si el circuito de sincronización de tiempo está proporcionando los datos de tiempo en un primer periodo de tiempo (N).
El circuito de sincronización de tiempo puede disponerse además para conmutar de dicho primer modo a dicho segundo modo dependiendo de si el circuito de sincronización de tiempo está proporcionando los datos de tiempo en un segundo periodo de tiempo (M).
El dispositivo puede comprender además un circuito de estimación de ubicación dispuesto para recibir los datos de tiempo y dispuesto para proporcionar una estimación de ubicación dependiendo de la información de tiempo.
El circuito estimador de ubicación puede comprender además un registro de ubicación.
El registro de ubicación puede comprender memoria de acceso aleatoria.
El primer modo de operación es preferentemente una secuencia de sincronización de tiempo de GPS.
El segundo modo de operación es preferentemente una secuencia de sincronización de tiempo de GPS asistida por ubicación.
Un circuito integrado puede comprender un dispositivo de posicionamiento satelital como se ha descrito anteriormente.
De acuerdo con un segundo aspecto de la invención, se proporciona un procedimiento para proporcionar datos de tiempo en un sistema de posicionamiento... [Seguir leyendo]
Reivindicaciones:
1. Un aparato que comprende:
un circuito de sincronización de tiempo (325) dispuesto para proporcionar datos de tiempo para un estimador de ubicación (319), disponiéndose el circuito (325) para, en un primer modo, proporcionar los datos de tiempo dependiendo de al menos una señal de posicionamiento satelital recibida por un receptor del sistema de posicionamiento (303) sin la asistencia de una estimación de ubicación y para, en un segundo modo, proporcionar los datos de tiempo dependiendo de al menos una señal de posicionamiento satelital recibida por un receptor del sistema de posicionamiento (303) con la asistencia de una estimación de ubicación, disponiéndose el circuito de sincronización de tiempo (325) para conmutar entre el primer y segundo modos de operación dependiendo de si el circuito de sincronización de tiempo (325) está proporcionando los datos de tiempo.
2. Un aparato de acuerdo con la reivindicación 1 en el que el circuito de sincronización de tiempo (325) se dispone además para conmutar del segundo modo al primer modo dependiendo de si el circuito de sincronización de tiempo está proporcionando los datos de tiempo en un primer periodo de tiempo (N).
3. Un aparato de acuerdo con la reivindicación 1 ó 2, en el que el circuito de sincronización de tiempo (325) se dispone además para conmutar de dicho primer modo a dicho segundo modo dependiendo de si el circuito de sincronización de tiempo (325) está proporcionando los datos de tiempo en un segundo periodo de tiempo (M).
4. Un aparato de acuerdo con cualquiera de las reivindicaciones anteriores, que comprende además un estimador de ubicación (319) dispuesto para recibir datos de tiempo y dispuesto para proporcionar una estimación de ubicación dependiendo de la información de tiempo.
5. Un aparato de acuerdo con cualquiera de las reivindicaciones anteriores en el que el estimador de ubicación de
(319) comprende además un registro de ubicación (323).
6. Un aparato de acuerdo con la reivindicación 5 en el que el registro de ubicación (323) comprende una memoria de acceso aleatoria.
7. Un aparato de acuerdo con cualquiera de las reivindicaciones anteriores en el que el primer modo de operación es una secuencia de sincronización de tiempo de GPS.
8. Un aparato de acuerdo con cualquiera de las reivindicaciones anteriores en el que el segundo modo de operación es una secuencia de sincronización de tiempo de GPS asistida por ubicación.
9. Un procedimiento para producir datos de tiempo en un sistema de posicionamiento satelital que comprende un circuito de sincronización de tiempo (325) dispuesto para proporcionar datos de tiempo para la estimación de ubicación, en el que el procedimiento comprende:
recibir (403) al menos una señal del satélite de posicionamiento global: caracterizado porque: recibe (405) al menos una estimación de ubicación; produce (413) en un primer modo los datos de tiempo dependiendo de la al menos una señal de posicionamiento satelital sin la asistencia de una estimación de ubicación; produce (409) en un segundo modo la información de tiempo dependiendo de la al menos una señal de posicionamiento satelital con la asistencia de una estimación de ubicación; conmuta (411) entre los modos dependiendo de si el circuito de sincronización de tiempo (325) está proporcionando los datos de tiempo.
10. Un procedimiento de acuerdo con la reivindicación 9, en el que la etapa de conmutar (411) entre los modos comprende conmutar del segundo modo al primer modo dependiendo de si el circuito de sincronización de tiempo
(325) está proporcionando los datos de tiempo adecuados después de un primer periodo de tiempo (N).
11. Un procedimiento de acuerdo con las reivindicaciones 9 ó 10, en el que la etapa de conmutar (411) entre los modos comprende además conmutar del primer modo al segundo modo dependiendo de si el circuito de sincronización de tiempo (325) está proporcionando los datos de tiempo después de un segundo periodo de tiempo (M).
12. Un procedimiento de acuerdo con una de las reivindicaciones 9 a 11, que comprende además un circuito de estimación de ubicación (319) que recibe datos de tiempo y proporciona una estimación de ubicación dependiendo de la información del tiempo.
13. Un procedimiento de acuerdo con una de las reivindicaciones 9 a 12, en el que el primer modo de operación es una secuencia de sincronización de tiempo de GPS.
14. Un procedimiento de acuerdo con una de las reivindicaciones 9 a 13, en el que el segundo modo de operación es una secuencia de sincronización del tiempo de GPS asistida por ubicación.
Patentes similares o relacionadas:
Determinación de posición usando mediciones de épocas pasadas y presentes, del 26 de Febrero de 2020, de QUALCOMM INCORPORATED: Un procedimiento para determinar una solución de navegación que comprende: obtener información del sistema de navegación inercial, […]
Dispositivo de comunicación inalámbrica montable en objeto móvil, sistema de control de monitoreo de dispositivo de comunicación inalámbrica montable en objeto móvil, método de control de monitoreo de dispositivo de comunicación inalámbrica montable en objeto móvil y centro de control remoto, del 18 de Diciembre de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un dispositivo de comunicación inalámbrica configurado para ser montado en un objeto móvil, incluyendo el dispositivo de comunicación […]
Uso de estaciones móviles para la determinación de parámetros de localización de estaciones base en un sistema de comunicación móvil inalámbrico, del 20 de Septiembre de 2017, de QUALCOMM INCORPORATED: Un procedimiento para determinar la posición de una estación base en una red de comunicación inalámbrica, comprendiendo el procedimiento: […]
Asistente para la práctica de golf personal y método y sistema para mostrar gráficamente información relacionada con golf y para recoger, procesar y distribuir datos relacionados con golf, del 21 de Junio de 2017, de Skyhawke Technologies, LLC: Un aparato portátil para mostrar distancias entre un golfista y un objeto en un campo de golf, que comprende: un dispositivo informático; un dispositivo de medición […]
Proporcionar y usar mensajes que comprenden información de localización, del 22 de Marzo de 2017, de Nokia Technologies OY: Un método que comprende: recibir o ensamblar un mensaje que incluye información de localización y un identificador de tiempo de referencia, […]
Procedimiento de determinación de la posición de un receptor de sistema de navegación por satélite, y sistema asociado, del 25 de Enero de 2017, de THALES: Procedimiento de determinación de la posición de un receptor de sistema de navegación por satélite en el que se utiliza una ponderación […]
 Dispositivo de comunicaciones inalámbricas montable en objeto móvil, sistema de control de monitoreo de dicho dispositivo, método de control de monitoreo del mismo y centro de control remoto, del 6 de Abril de 2016, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un dispositivo de comunicaciones inalámbricas con una función de enrutador inalámbrico montable en un vehículo, que incluye: una unidad de comunicaciones móviles que puede […]
Dispositivo de comunicaciones inalámbricas montable en objeto móvil, sistema de control de monitoreo de dicho dispositivo, método de control de monitoreo del mismo y centro de control remoto, del 6 de Abril de 2016, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un dispositivo de comunicaciones inalámbricas con una función de enrutador inalámbrico montable en un vehículo, que incluye: una unidad de comunicaciones móviles que puede […]
 Procedimiento de estimación de la dirección de llegada de señales de navegación en un receptor después de la reflexión por unas paredes en un sistema de posicionamiento por satélite, del 16 de Febrero de 2016, de THALES: Procedimiento de estimación de la dirección de llegada de señales de navegación en un receptor tras la reflexión por unas paredes en un sistema de posicionamiento por […]
Procedimiento de estimación de la dirección de llegada de señales de navegación en un receptor después de la reflexión por unas paredes en un sistema de posicionamiento por satélite, del 16 de Febrero de 2016, de THALES: Procedimiento de estimación de la dirección de llegada de señales de navegación en un receptor tras la reflexión por unas paredes en un sistema de posicionamiento por […]