SENSOR DE CARGA DE FIBRA ÓPTICA CON ESTRUCTURA DE SOPORTE COMPLEJA.
Estructura de principio para sensores de carga de fibra óptica con una estructura de soporte y de deformación (1) y con al menos una guía de fibra óptica (2,
2a, 2b) que presentas un extremo de entrada y un extremo de salida, en la que la carga actúa sobre la disposición de guía de fibra óptica y es detectada por luz transmitida desde el extremo de entrada de la luz hacia el extremo de salida de la luz en virtud de modificaciones del radio de flexión de la guía de fibra óptica que forma la disposición de guía de fibra óptica, caracterizada porque el extremo de entrada de la luz y el extremo de salida de la luz están dispuestos en común fuera de la estructura de soporte y de deformación, la estructura de soporte y de deformación presenta elementos en forma de barra duros, accesibles desde todos los lados, que están dispuestos en un plano de tal forma que sus secciones transversales tienen distancias iguales sobre al menos un recorrido determinado a través del plano, pero no más allá de este recorrido, y la guía de fibra óptica se extienden precisamente sobre este recorrido debajo de los elementos en forma de barra, de manera que dichas secciones transversales de los elementos en forma de barra están realizadas y sus distancias iguales están seleccionadas de tal forma que a través de la flexión en forma ondulada provocada de esta manera se asegura siempre una fuerza de presión de apriete pequeña entre la guía de fibra óptica y los elementos en forma de barra y de manera que los elementos en forma de barra están conectados entre sí de forma casi rígida directamente o por medio de elementos de unión especiales más allá del recorrido, sobre el que se extiende la guía de fibra óptica, de tal manera que a través de los elementos en forma de barra y/o a través de los elementos de unión no se forman mallas cerradas por todos los lados ni estructuras lineales dilatadas a partir de los elementos unidos directamente entre sí
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DE2002/002875.
Solicitante: SENSOR LINE GMBH.
Nacionalidad solicitante: Alemania.
Dirección: CARL-POELLATH-STRASSE 19 86529 SCHROBENHAUSEN ALEMANIA.
Inventor/es: PLAMPER,Jörg.
Fecha de Publicación: .
Fecha Solicitud PCT: 5 de Agosto de 2002.
Clasificación Internacional de Patentes:
- G01L1/24B2B
Clasificación PCT:
- G01L1/24 FISICA. › G01 METROLOGIA; ENSAYOS. › G01L MEDIDA DE FUERZAS, TENSIONES, PARES, TRABAJO, POTENCIA MECANICA, RENDIMIENTO MECANICO O DE LA PRESION DE LOS FLUIDOS (pesado G01G). › G01L 1/00 Medida de fuerzas o tensiones, en general (medida de la fuerza producida por un choque G01L 5/00). › midiendo las variaciones de las propiedades ópticas del material cuando está sometido a una sujeción, p. ej. por el análisis de la incitación por fotoelasticidad.
Clasificación antigua:
- G01L1/24 G01L 1/00 […] › midiendo las variaciones de las propiedades ópticas del material cuando está sometido a una sujeción, p. ej. por el análisis de la incitación por fotoelasticidad.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Finlandia, Chipre.
PDF original: ES-2363213_T3.pdf
Fragmento de la descripción:
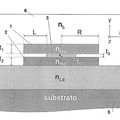
Los sensores de carga, que detectan una presión desde el exterior a través del llamado efecto de microflexión (Microbinding) de una guía de fibra óptica, presentan ventajas atractivas frente a los sensores con principios de funcionamiento distintos. Se conoce una serie grande de formas de realización. Todas ellas tienen en común que a través de la presión exterior la guía de fibra óptica es presionada contra una estructura perturbadora irregular dura, lo que provoca una pluralidad de deformaciones pequeñas, que conducen de nuevo a un incremento significativo de la amortiguación de las fibras. Por consiguiente, si se alimenta luz a uno de los extremos de las fibras, entonces una presión exterior conduce a una disminución de la potencia luminosa que llega a su otro extremo. Cuando el sensor está constituido discreto, es suficiente un fotodetector sencillo para la verificación de esta disminución de la potencia.
Pero aparte de la sensibilidad suficiente, existe también toda una serie de otos criterios, de los que depende si un sensor de este tipo está probado o no en la práctica. Así, por ejemplo, en muchos casos debe requerirse una estructura que proporcione una cierta capacidad de dilatación. Esto no sólo se aplica a situaciones, en las que es previsible una deformación fuerte del sensor. En su lugar, también tensiones internas, como aparecen, por ejemplo, siempre en el funcionamiento en virtud de la diferente dilatación térmica de los componentes individuales, pueden conducir s efectos no deseados incluso a la destrucción de las fibras de guía óptica sensibles. Una estructura dilatable es un medio eficaz para mantener reducidas tales tensiones. En concreto, esto significa, por ejemplo, que la guía de fibra óptica no se puede extender estirada en el sensor, para que se puedan compensar las modificaciones de la longitud de la estructura general.
Otro aspecto importante es la homogeneidad de la sensibilidad del sensor. En la mayor parte de las aplicaciones, se carga siempre solamente una parte relativamente pequeña del sensor. La señal de salida no debe depender demasiado de qué parte se trata precisamente. Esto conduce al requerimiento de que los lugares, en los que se deforma la guía de fibra óptica (lugares de deformación) deben tener distancias iguales, lo más pequeñas posible entre sí y deben configurarse, por su parte, lo más iguales posible entre sí.
Además, es extraordinariamente importante una propiedad, que se puede comparar con la impedancia de entrada de un aparato de medición eléctrico; los sensores de carga de cualquier tipo que sean no reaccionan finalmente a una fuerza, sino a una deformación. Si se aplica un peso libremente sobre un sensor de este tipo, entonces se caga con este peso, independientemente de la medida en que se deforma bajo el mismo. Si embargo, esta situación no se encuentra en la mayoría de las aplicaciones interesantes, sino que el peso está apoyado todavía elásticamente en otro lugar. Aquí durante la deformación del sensor se produce un “desplome” formal de la carga que actúa sobre el mismo. El recorrido, que es necesario, para provocar un efecto de microflexión en una guía de fibra óptica de este tipo, no es afortunadamente grande, pero no deben otros recorridos. Esto significa que el sensor debe estar constituido de tal forma que la guía de fibra óptica contacta siempre al menos en todos los lugares de deformación también en el estado no cargado, mejor todavía es presionada, en cambio, con una fuerza perfectamente definida. Pero esta última no debe ser también de nuevo demasiado grande, puesto que con ello se incrementa la amortiguación óptica del sensor y, en concreto, de forma proporcional (medida en dB) al número de los lugares de deformación, que pueden ser, por consiguiente, tanto mayor cuando menor es la fuerza de presión de apriete. En la práctica, no se puede realizar un contacto totalmente sin fuerza, tanto menos al mismo tiempo en el caso de una pluralidad de lugares de deformación, de manera que siempre es necesaria una cierta fuerza de presión de apriete. El mantenimiento de la misma lo más pequeña posible y, sin embargo, suficientemente grande para asegurar, en general, un contacto, representa una dificultad considerable.
En relación interior o bien en contradicción con los dos últimos requerimientos mencionados está la pretensión de poder configurar sensores de carga lo más dilatados posible. Se mejora la homogeneidad de la sensibilidad a través de una densidad alta de los lugares de deformación, puesto que entonces se promedian las diferencias. En cambio, se puede conseguir una dilatación mayor del sensor a través de la reducción de la densidad de los lugares de deformación, lo que es posible tanto más fácilmente cuanto menores sean las diferencias, que deben promediarse. De la misma manera se puede configurar el sensor mayor, elevando el número de los lugares de deformación con una densidad dada. Esto se consigue de nuevo tanto más fácilmente cuando menor sea el aumento de la amortiguación por lugar de deformación, por lo tanto, cuanto menos se pueda configurar la fuerza de presión de apriete en el estado no cargado.
Se reconoce que la posibilidad de implementación de todos los tres últimos requerimientos mencionados se basa en último término en la uniformidad máxima posible de los lugares de deformación en combinación con el mejor dominio posible de una fuerza de presión de apriete pequeña en el estado no cargado.
Para conseguir una sensibilidad lo más alta posible a la presión, que solamente hace posible muchas aplicaciones, a guía de fibra óptica no puede estar apoyada en el entorno inmediato de los lugares de deformación, aquí deben encontrarse espacios huecos “debajo” de la fibra, en los que se puede deformar incluso bajo actuación reducida de la fuerza. Por otra parte, existe el requerimiento de que el sensor no debe contener en otro caso espacios huecos, puesto que éstos deberían cerrarse entonces a través de deformación, antes de que se transmita la carga a detectar sobre la fibra. Esto significa que debe ser posible conseguir, para la transmisión de la carga sobre la fibra, una unión positiva unilateral entre ella y cualquier estructura elástica, en la cual se puede introducir entonces la carga desde fuera. Se consigue una unión positiva más fácilmente a través de un proceso de fusión, en el que un medio en estado líquido se adapta a la forma deseada y luego se solidifica o endurece en esta forma. Para que ahora en el presente caso se mantenga esta unión positiva unilateralmente, como se requiere, debe ser posible impedir que el material líquido rellene de cualquier manera los espacios huecos necesarios y, en concreto, sin que en este caso se limite el cumplimiento de los requerimientos indicados anteriormente. Esto es posible tensando una estructura elástica del tipo de membrana “sobre” la guía de fibra óptica. Para ello no es adecuada tampoco cualquier estructura.
Otros aspectos se refieren a la posibilidad de fabricación del sensor de carga. Se requiere, por ejemplo, un conducto de alimentación de fibra óptica, puesto que si hubiera que montar el emisor óptico junto al receptor directamente en el sensor, es decir, en el lugar de medición, se aportarían de esta manera muchas ventajas a la realización de fibra óptica. Si un conducto de alimentación de este tipo debe empalmarse en la guía óptica del sensor, esto complica y encarece la fabricación. Esto se aplica, naturalmente, de manera especial, incluso en el caso de que el sensor propiamente dicho haga necesarios procesos de empalme. Es más favorable que para el sensor y el conducto de alimentación se pueda utilizar una y la misma guía de fibra óptica, y puesto que con frecuencia son necesarios conductos de alimentación más largos, es todavía esencialmente más favorable que se pueda realizar la fabricación bajo manipulación de la parte central de una guía óptica dilatada, sin que en este caso deben incorporarse al mismo tiempo sus extremos.
A partir de la necesidad de uniformidad de los lugares de deformación resulta otro aspecto que se refiere a la fabricación: Después de que la guía de fibra óptica –posiblemente definida. Ha sido combinada con la estructura de deformación, el módulo resultante debe poder manipularse a continuación, al menos en el sentido de que el proceso de fabricación se puede conducir racionalmente hasta el final, sin que se perjudique en este caso la disposición totalmente definida de fibra y estructura de deformación. Por consiguiente, una estructura de sensor dada puede considerarse tanto más ventajosa cuanto más fácilmente... [Seguir leyendo]
Reivindicaciones:
1. Estructura de principio para sensores de carga de fibra óptica con una estructura de soporte y de deformación (1) y con al menos una guía de fibra óptica (2, 2a, 2b) que presentas un extremo de entrada y un extremo de salida, en la que la carga actúa sobre la disposición de guía de fibra óptica y es detectada por luz transmitida desde el extremo de entrada de la luz hacia el extremo de salida de la luz en virtud de modificaciones del radio de flexión de la guía de fibra óptica que forma la disposición de guía de fibra óptica, caracterizada porque el extremo de entrada de la luz y el extremo de salida de la luz están dispuestos en común fuera de la estructura de soporte y de deformación, la estructura de soporte y de deformación presenta elementos en forma de barra duros, accesibles desde todos los lados, que están dispuestos en un plano de tal forma que sus secciones transversales tienen distancias iguales sobre al menos un recorrido determinado a través del plano, pero no más allá de este recorrido, y la guía de fibra óptica se extienden precisamente sobre este recorrido debajo de los elementos en forma de barra, de manera que dichas secciones transversales de los elementos en forma de barra están realizadas y sus distancias iguales están seleccionadas de tal forma que a través de la flexión en forma ondulada provocada de esta manera se asegura siempre una fuerza de presión de apriete pequeña entre la guía de fibra óptica y los elementos en forma de barra y de manera que los elementos en forma de barra están conectados entre sí de forma casi rígida directamente o por medio de elementos de unión especiales más allá del recorrido, sobre el que se extiende la guía de fibra óptica, de tal manera que a través de los elementos en forma de barra y/o a través de los elementos de unión no se forman mallas cerradas por todos los lados ni estructuras lineales dilatadas a partir de los elementos unidos directamente entre sí.
2. Estructura de principio para sensores de carga de fibra óptica de acuerdo con la reivindicación 1, en la que tanto los elementos en forma de barra como también los elementos de unión casi rígidos están configurados en forma de una estructura común en forma de alambre que se extiende a través del plano.
3. Estructura de principio para sensores de carga de fibra óptica de acuerdo con una de las reivindicaciones 1 y 2, en la que la estructura de soporte y de deformación (1) y la guía de fibra óptica (2, 2a, 2b) están rodeadas por una envoltura elástica hueca (4), que se aproxima a la guía de fibra óptica en los lugares, en los que la guía de fibra óptica cruza los elementos en forma de barra de la estructura de soporte y de deformación.
4. Estructura de principio para sensores de carga de fibra óptica de acuerdo con una de las reivindicaciones 1 y 2, en la que la estructura de soporte y de deformación (1) y la guía de fibra óptica (2, 2a, 2b) están incrustadas en un cuerpo (3) que está constituido de elastómero.
5. Estructura de principio para sensores de carga de fibra óptica de acuerdo con la reivindicación 3, en la que la estructura de soporte y de deformación (1), la guía de fibra óptica (2, 2a, 2b) y la envoltura elástica (4) están incrustadas en un cuerpo (3) que está constituido de un elastómero.
6. Estructura de principio para sensores de carga de fibra óptica de acuerdo con una de las reivindicaciones anteriores, en la que varias guías de fibra óptica (2a, 2b) se extienden adyacentes entre sí a través de la estructura de soporte y de deformación (1).
7. Estructura de principio para sensores de carga de fibra óptica de acuerdo con una de las reivindicaciones 1 a 5, en la que dos guías de fibra óptica (2a, 2b) se extienden a través de la estructura de soporte y de deformación de tal manera que en lugares, en los que una de las guías de fibra óptica se extiende sobre uno de los elementos en forma de barra de la estructura de soporte y de deformación, la otra guía de fibra óptica se extiende por debajo del elemento en forma de barra respectivo y a la inversa.
Patentes similares o relacionadas:
 NUEVO SENSOR OPTICO INTEGRADO DE DEFLEXION MECANICA DE ULTRA-ALTA SENSIBILIDAD, del 1 de Junio de 2010, de UNIVERSIDAD POLITECNICA DE MADRID: Nuevo sensor óptico integrado de deflexión mecánica de ultra-alta sensibilidad.
La invención propuesta consiste en un nuevo sensor óptico formado por una guía ranurada […]
NUEVO SENSOR OPTICO INTEGRADO DE DEFLEXION MECANICA DE ULTRA-ALTA SENSIBILIDAD, del 1 de Junio de 2010, de UNIVERSIDAD POLITECNICA DE MADRID: Nuevo sensor óptico integrado de deflexión mecánica de ultra-alta sensibilidad.
La invención propuesta consiste en un nuevo sensor óptico formado por una guía ranurada […]
Sensor de dilatación soldable para superficies curvadas, del 25 de Marzo de 2020, de Hottinger Brüel & Kjaer GmbH: Sensor de dilatación soldable con las siguientes características: a. un sensor de dilatación con dos secciones extremas, que están acopladas […]
Disposición de sensor de dilatación-FBG soldable, del 25 de Marzo de 2020, de HOTTINGER BALDWIN MESSTECHNIK GMBH: Disposición de sensor de dilatación-FBG con un soporte de sensor de chapa de acero y al menos un sensor de dilatación-FBG , en la que - el sensor de dilatación-FBG […]
Sensor de memoria de estrés colorimétrico basado en nanopartículas plasmónicas, del 19 de Febrero de 2020, de THE REGENTS OF THE UNIVERSITY OF CALIFORNIA: Un sensor de memoria de tensiones colorimetrico basado en nanoparticulas plasmonicas, comprendiendo el sensor una pelicula colorimetrica sensible a la tension configurada […]
Cable óptico de fibra con sensibilidad transversal ajustada, del 11 de Diciembre de 2019, de OptaSense Holdings Limited: Un cable de fibra optica para deteccion de fibra optica distribuida que tiene un eje de cable longitudinal que comprende; al menos una fibra optica; […]
Sistemas de instrumentos robóticos que utilizan sensores de fibra óptica, del 9 de Octubre de 2019, de KONINKLIJKE PHILIPS N.V: Un sistema que comprende: un cuerpo de instrumento alargado ; un sensor de fibra óptica acoplado al cuerpo de instrumento alargado y que forma un sensor […]
Dispositivo para supervisar el desgaste en catenarias, del 2 de Octubre de 2019, de HOTTINGER BALDWIN MESSTECHNIK GMBH: Dispositivo para supervisar el desgaste en catenarias por medio de un sistema de medición de fuerza, que presenta lo siguiente: - dos barras de contacto (1a, 1b), que […]
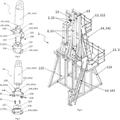 Sistema y método de control de prueba de carga de unidad de elevación de máquina de soporte de vehículos, del 25 de Septiembre de 2019, de CRRC Qingdao Sifang Rolling Stock Research Institute Co., Ltd: Un sistema de prueba y control de prueba de carga de una unidad de elevación de elevador de vehículos, adecuado para su uso para someter a prueba una unidad […]
Sistema y método de control de prueba de carga de unidad de elevación de máquina de soporte de vehículos, del 25 de Septiembre de 2019, de CRRC Qingdao Sifang Rolling Stock Research Institute Co., Ltd: Un sistema de prueba y control de prueba de carga de una unidad de elevación de elevador de vehículos, adecuado para su uso para someter a prueba una unidad […]