RADAR CON REPRESENTACIÓN DISEÑADA DE FORMA TRIDIMENSIONAL.
RADAR CON PANTALLA DE DISEÑO TRIDIMENSIONAL EN LA CUAL UN DATO DE IMAGEN BIDIMENSIONAL Y UN DATO DE IMAGEN DISEÑADA TRIDIMENSIONALMENTE SON MOSTRADAS DE FORMA COMBINADA EN UNA MEMORIA DE VIDEO (40) CON AYUDA DE UN CONTROLADOR DE IMAGEN (44),
Y ESTAS SON MOSTRADAS SIMULTANEAMENTE SOBRE UNA PANTALLA DE UNA UNIDAD DE PRESENTACION (42)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E99304450.
Solicitante: JAPAN RADIO CO., LTD.
Nacionalidad solicitante: Japón.
Dirección: 1-1, SHIMORENJAKU 5-CHOME MITAKA-SHI, TOKYO 181-8510 JAPON.
Inventor/es: SEKINE, CHOGO.
Fecha de Publicación: .
Fecha Solicitud PCT: 8 de Junio de 1999.
Clasificación PCT:
- G01S7/20 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › Presentaciones estereoscópicas; Presentaciones tridimensionales; Presentaciones pseudotridimensionales.
Clasificación antigua:
- G01S7/20 G01S 7/00 […] › Presentaciones estereoscópicas; Presentaciones tridimensionales; Presentaciones pseudotridimensionales.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Irlanda, Finlandia, Chipre.
Fragmento de la descripción:
La presente invención se refiere a un radar de representación diseñada de forma tridimensional que se transporta, por ejemplo sobre un barco y que preferiblemente detecta un objetivo.
Descripción de Técnicas Relacionadas:
En los últimos años, el radar se utiliza ampliamente sobre pequeños barcos tales como las embarcaciones de recreo. Como es conocido en la técnica, tal radar se opera como sigue. Esto es, una transmisión de ondas de radio, que se transmite desde una antena rotatoria, se refleja por un objetivo. La onda de radio reflejada desde el mismo se recibe para representar una imagen circular concéntrica representada alrededor del centro de su propia posición sobre una unidad de representación.
En tal sistema, la intensidad de la onda de radio reflejada se representa como una diferencia de brillo del punto en el que existe el objetivo, por ejemplo, sobre una pantalla de la unidad de representación del tipo de exploración de trama.
Cuando se usa tal radar, es posible observar un barco objetivo moviéndose que enfoca un barco subjetivo durante su navegación y anclaje. Además, es posible supervisar si el barco subjetivo se desvió o no de su posición de anclaje, por ejemplo, debido a una marea, en base a la onda de radio reflejada desde un objeto fijo reflectante.
En general, cuando se opera tal unidad de pantalla equipada para un radar de barco, el punto objetivo sobre la pantalla se representa en un modo diseñado de forma bidimensional como una vista plana, en la cual no se representa la imagen de modo que el objetivo se represente en base a la información sobre la altura en la pantalla.
Por lo tanto, por ejemplo, cuando el radar se transporta sobre un barco de recreo o similar, es difícil para un usuario que no está muy familiarizado con la observación del radar, realizar de forma eficaz el reconocimiento y la observación de las circunstancias de alrededor y la detección del objetivo en base a la imagen representada. Se presenta el problema de que el radar transportado es difícil de utilizar de una forma eficaz.
Para resolver este problema, el presente solicitante ha propuesto un aparato de radar que posibilita que un usuario que no está muy acostumbrado a la observación del radar, por ejemplo, a detectar de forma eficaz el objetivo, representando el objetivo de forma tridimensional sobre la pantalla de la unidad de representación. Detalles del radar de representación diseñada de forma tridimensional se divulgan en la Publicación de Patente Japonesa Nº 830732.
El radar de representación diseñada de forma tridimensional comprende una unidad de transmisión/recepción de radar para deducir, desde un objetivo, las señales con respecto a la información de orientación, la información de distancia, y la información de la intensidad de recepción; una unidad de representación; un convertidor de coordenadas diseñado de forma tridimensional para realizar la conversión en una señal para indicar la información de orientación y la información de distancia como valores de coordenadas XY en base al método de dibujo de la proyección de perspectiva junto con la información de la intensidad de recepción para indicar una longitud de una línea recta como una altura del objetivo, un medio de generación de marcaciones para enviar una señal de marcación de distancias con forma de retícula cuando se realiza la representación diseñada de forma tridimensional sobre la pantalla de la unidad de representación, y un medio de almacenamiento provisto con direcciones de almacenamiento correspondientes a los elementos de imagen respectivos sobre la unidad de representación; para almacenar la información de intensidad de recepción en la dirección de almacenamiento correspondiente a las coordenadas XY obtenidas por el convertidor de coordenadas diseñado de forma tridimensional y almacenar la señal de marcación cuando se realiza la representación diseñada de forma tridimensional de modo que la información almacenada y la señal de marcación almacenada se leen sucesivamente para enviar una señal de imagen a la unidad de representación.
El radar de representación diseñada de forma tridimensional con respecto a la técnica convencional posibilita que un observador que no está muy acostumbrado a la observación del radar realice la detección o similar representando el objetivo de forma tridimensional sobre el radar de representación.
Sin embargo, el radar de representación diseñada de forma tridimensional está construido de modo que la representación bidimensional y la representación diseñada de forma tridimensional se conmutan para usarse de forma selectiva. Por lo tanto, en primer lugar, cuando se conmuta la pantalla de representación bidimensional a la pantalla de representación diseñada de forma tridimensional, o cuando se conmuta de forma inversa la pantalla de representación diseñada de forma tridimensional a la pantalla de representación bidimensional, se requiere un cierto periodo de tiempo para permitir que la antena de una vuelta. Esto es, en el caso de un radar ordinario, se requiere un periodo de tiempo de aproximadamente 2,5 a 3 segundos. Durante este periodo, el usuario, por ejemplo el navegante, tiene que esperar a que transcurra este periodo de tiempo.
En segundo lugar, se requiere un cierto tiempo hasta que el navegante, que está acostumbrado a la pantalla de representación bidimensional se acostumbre a la pantalla de representación diseñada de forma tridimensional. Durante este periodo hasta que el navegante se acostumbra, es preferible que la pantalla de dos dimensiones y la pantalla de representación diseñada de forma tridimensional puedan usarse simultáneamente en combinación. Sin embargo, tal operación no puede realizarse cuando se usa un radar de representación diseñada de forma tridimensional convencional.
Además, el radar de representación diseñada de forma tridimensional convencional está construido de forma que la indicación de marcaciones de distancia con forma de retícula se superpone sobre la unidad de representación. Sin embargo, cuando se usa el radar durante la navegación a través de un rio o una ensenada, los propios objetivos de alrededor tienen formas que son fácilmente observables en tres dimensiones en muchos casos. Si el marcador de distancias se representa sobre la pantalla en el modo de superposición cuando se representan los datos de imagen diseñada de forma tridimensional, entonces la representación es por el contrario complicada, y en algunos casos es difícil observar la imagen del objetivo.
Además, el radar de representación diseñada de forma tridimensional descrito anteriormente está construido de modo que la representación diseñada de forma tridimensional está hecha sobre la base de un único punto de visión en cierta dirección fija. Por lo tanto, el radar de representación diseñada de forma tridimensional no satisface la demanda de que la representación diseñada de forma tridimensional se realice en base a un punto de visión en un ángulo arbitrario.
El documento US-A-5.061.935 divulga un radar de representación tridimensional que comprende una unidad de transmisión-recepción del radar, una pantalla, un convertidor de coordenadas tridimensional, un generador de marcación y una memoria de video. El radar de representación tridimensional también comprende un conmutador de selección de modo que selecciona bien un modo de representación bidimensional o tridimensional.
El documento US-A-5.357.258 describe la conversión de una representación del indicador de posición plana a una representación en perspectiva correctamente puesta a escala en base a la altitud de una aeronave y los parámetros de representación. Se involucran dos memorias de representación, ambas de base Cartesiana: una almacena la imagen del indicador de posición plana que se va a convertir; y la otra almacena la imagen convertida para su representación. La primera memoria está dirigida para cada punto de imagen de los datos almacenados en la segunda memoria.
El documento US-A-5.339.085 divulga la conversión de una señal de radar en una información de imagen de radar expresada en un sistema de coordenadas tridimensional con las coordenadas relativas a un punto de vista particular. Se produce una representación tridimensional a partir de la combinación de la información de la imagen del radar con la información del terreno y del objetivo (que se ha convertido al mismo sistema de coordenadas). Se usa el recorte para eliminar porciones de la imagen de radar dispuestas detrás del...
Reivindicaciones:
1. Un radar de representación diseñada de forma tridimensional que comprende:
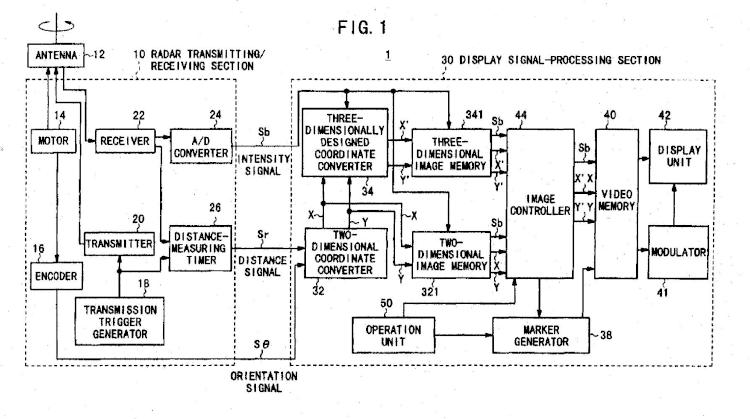
una sección de transmisión/recepción del radar (10) para deducir una señal de orientación (SO), una señal de distancia (Sr) y una señal de intensidad de recepción (Sb) con respecto a un objetivo respectivamente. una unidad de representación (42); una memoria de representación (40) proporcionada con una célula de memoria correspondiente a cada uno de los elementos de imagen sobre dicha unidad de representación (42), para leer los datos de imagen almacenados en dicha célula de memoria para suministrarlos a dicha unidad de representación; un convertidor de coordenadas bidimensional (32) para convertir dicha señal de orientación y dicha señal de distancia en valores de coordenadas XY a utilizar para la representación de pantalla bidimensional; una memoria de imagen bidimensional (321) para almacenar dicha señal de intensidad de recepción como datos de la imagen bidimensional (x, y) en dicha célula de memoria designada por dichos valores de coordenadas XY; un convertidor de coordenadas diseñado de forma tridimensional (34) para convertir dicha señal de orientación y dicha señal de distancia en valores de coordenadas (x', y') en base a un método de dibujo de proyección de perspectiva, y convirtiendo dicha señal de intensidad de recepción en una señal de indicación (Sb) para indicar una altura de dicho objetivo con una longitud de una línea recta; el lector de representación diseñada de forma dimensional caracterizado porque comprende además:
un controlador de imagen (44) para sacar selectivamente a dicha memoria de representación (40), uno o ambos de dichos datos de imagen bidimensional (x, y) sacados desde dicha memoria de imagen bidimensional (321) y los datos de imagen diseñada de forma tridimensional (x', y', Sb) sacados desde dicho convertidor de coordenadas diseñado de forma tridimensional (34) sobre la base de una instrucción de un operario, en el que: una cualquiera o ambas de una imagen bidimensional con respecto a dichos datos de imagen bidimensional (x, y) y una imagen diseñada de forma tridimensional con respecto a dichos datos de imagen diseñada de forma tridimensional (x', y', Sb) se representan sobre dicha unidad de representación (42) sobre la base del control realizado por dicho controlador de imagen (44); y un modulador (41), en el que:
dicho modulador (41) está suministrado con dicha señal de indicación (Sb) para indicar dicha señal de intensidad de recepción como dicha altura de dicho objetivo con dicha longitud de dicha línea recta, como datos de dichos datos de imagen diseñada de forma tridimensional desde dicha memoria de representación (40), y en el que el modulador (41) suministra una señal de cambio para cambiar el brillo, la turbiedad, o el color correspondientes a la magnitud de dicha señal de indicación (Sb) para dicha unidad de representación (42) de modo que dicho brillo, dicha turbiedad, o dicho color se cambian y se representan sobre dicha unidad de representación (42) dependiendo de las alturas de las porciones individuales de dicho objetivo.
2. El radar de representación diseñado de forma tridimensional de acuerdo con la reivindicación 1, que comprende además:
un generador de marcación (38), en el que: dicho generador de marcaciones (38) convierte las señales de marcación de distancias con forma de rejilla rectangular en valores de coordenadas XY en base a dicho método de dibujo de proyección de perspectiva para obtener señales de marcación de distancias en forma de retícula basada en la proyección de perspectiva (M21, M22, M23) que se suministran a dicha memoria de representación (40) cuando dicha imagen diseñada de forma tridimensional se representa sobre una pantalla en dicha unidad de representación (42).
3. El radar de representación diseñada de forma tridimensional de acuerdo con la reivindicación 2, en el que dichas señales de marcación de distancia con forma de retícula en base a la proyección de perspectiva suministradas desde dicho generador de marcaciones (38) se superponen selectivamente sobre dichos datos de imagen diseñada de forma tridimensional sobre la base de una instrucción de dicho operador.
4. El radar de representación diseñada de forma tridimensional de acuerdo con la reivindicación 1, que comprende además:
un generador de marcación (38), en el que: dicho generador de marcación (38) suministra señales de marcación de distancia circulares concéntricas (M11, M12, M13) a dicha memoria de representación (40) cuando se representa dicha imagen bidimensional sobre una pantalla de dicha unidad de representación (42).
5. El radar de representación diseñada de forma tridimensional de acuerdo con la reivindicación 4, en el que dichas señales de marcación de distancias circulares concéntricas suministradas desde dicho generador de marcación (38)
se superponen selectivamente sobre dichos datos de imagen bidimensionales sobre la base de una instrucción de dicho operador.
6. El radar de representación diseñada de forma tridimensional de acuerdo con la reivindicación 1, que comprende además:
un generador de marcación (38), en el que: dicho generador de marcación (38) convierte las señales de marcación de distancias circulares concéntricas en valores de coordenadas XY en base a dicho método de dibujo de proyección de la perspectiva para obtener señales de marcación de distancias sustancialmente con forma de huevo (M31, M32, M33) que se suministran a dicha memoria de representación (40) cuando se representa dicha imagen diseñada de forma tridimensional sobre una pantalla de dicha unidad de representación (42).
7. El radar de representación diseñada de forma tridimensional de acuerdo con la reivindicación 6, en el que dichas señales de marcación de distancias sustancialmente en forma de huevo suministradas desde dicho generador de marcación (38) se superponen selectivamente sobre dichos datos de imagen diseñada de forma tridimensional sobre la base de una instrucción de dicho operador.
8. El radar de representación diseñad de forma tridimensional de acuerdo con una cualquiera de las reivindicaciones de 1 a 7, en el que dicho generador de marcación (38) genera además una marcación con forma de cruz (M40, M41) en una posición designada sobre dicha pantalla de dicha unidad de representación (42) en base a una instrucción de dicho operador.
9. El radar de representación diseñada de forma tridimensional de acuerdo con la reivindicación 8, en el que dichas marcaciones con forma de cruz se representan en dichas posiciones designadas correspondientes a otra sobre dicha imagen de representación bidimensional y dicha imagen de representación diseñada de forma tridimensional representadas sobre dicha unidad de representación respectivamente.
10. El radar de representación diseñada de forma tridimensional de acuerdo con la reivindicación 1, que comprende además:
un generador de marcación (38), en el que:
dicho generador de marcación (38) convierte las señales de marcación de distancia con forma de retícula rectangular o señales de marcación de distancia de circulares concéntricas en valores de coordenadas XY en base a dicho método de dibujo de proyección de perspectiva respectivamente para obtener las señales de marcación de distancia con forma de retícula basada en la proyección de perspectiva o señales de marcación de distancia sustancialmente con forma de huevo que se suministran a dicha memoria de representación cuando se representa dicha imagen diseñada de forma tridimensional sobre una pantalla de dicha unidad de representación (42) de modo que dichas señales de marcación de distancia con forma de retícula basada en la proyección de perspectiva o dichas señales de marcación de distancia sustancialmente con forma de huevo se superponen selectivamente sobre dichos datos de imagen diseñada de forma tridimensional sobre la base de una instrucción de dicho operario. dicho generador de marcación (38) suministra además señales de marcación de distancias circulares concéntricas a dicha memoria de representación (40) cuando se representa dicha imagen bidimensional sobre dicha pantalla de dicha unidad de representación (42) de modo que dichas señales de marcación de distancias circulares concéntricas se superponen selectivamente sobre dichos datos de imagen bidimensional sobre la base de una instrucción de dicho operario, y dicho generador de marcación (38) genera además marcaciones con forma de cruz en posiciones designadas sobre dicha pantalla de dicha unidad de representación (42) sobre la base de una instrucción de dicho operario de modo que dichas marcaciones con forma de cruz se representan en dichas posiciones designadas correspondientes a otra sobre dicha imagen de representación bidimensional y dicha imagen de representación diseñada de forma tridimensional sobre dicha unidad de representación
(42) respectivamente.
11. El radar de representación diseñada de forma tridimensional de acuerdo con una cualquiera de las reivindicaciones de 1 a 10, en el que dicho convertidor de coordenadas diseñado de forma tridimensional (34) aplica rotación a la operación de conversión de coordenadas de dicho convertidor de coordenadas diseñado de forma tridimensional (34) sobre la base de una instrucción de dicho operario.
Patentes similares o relacionadas:
Detección de un objeto oculto, del 28 de Marzo de 2018, de BATTELLE MEMORIAL INSTITUTE: Sistema, que comprende: dos o más conjuntos distanciados entre sí para definir una región de interrogación entre ellos, donde los conjuntos […]
 Procedimiento y dispositivo para la visualización de objetos, del 8 de Noviembre de 2013, de SAAB AB: Procedimiento para la visualización de los objetos circundantes de un avión de un usuario en una superficie devisualización en dicho avión, en el que […]
Procedimiento y dispositivo para la visualización de objetos, del 8 de Noviembre de 2013, de SAAB AB: Procedimiento para la visualización de los objetos circundantes de un avión de un usuario en una superficie devisualización en dicho avión, en el que […]
RADAR DE REPRESENTACION TRIDIMENSIONAL, del 16 de Enero de 1998, de HUGHES MISSILE SYSTEMS COMPANY: UN SISTEMA Y UN METODO DE RADAR DE REPRESENTACION TRIDIMENSIONAL PARA GENERAR Y PROCESAR INFORMACION DE RADAR PARA PRODUCIR UNA IMAGEN TRIDIMENSIONAL DE LOS OBJETOS […]
 PROCEDIMIENTO Y DISPOSITIVO DE PRESENTACION DE OBJETOS EN UN ESPACIO CIRCUNDANTE, del 1 de Mayo de 2008, de SAAB AB: Procedimiento para mostrar, sobre una superficie (I) de visualización y desde una posición de referencia, la dirección hasta objetos (A, B) […]
PROCEDIMIENTO Y DISPOSITIVO DE PRESENTACION DE OBJETOS EN UN ESPACIO CIRCUNDANTE, del 1 de Mayo de 2008, de SAAB AB: Procedimiento para mostrar, sobre una superficie (I) de visualización y desde una posición de referencia, la dirección hasta objetos (A, B) […]