PLATAFORMA DE LANZAMIENTO/CAPTURA ASISTIDA POR ROBOT PARA UN VEHÍCULO AÉREO NO TRIPULADO.
Una plataforma para el lanzamiento y/o la captura de una aeronave o vehículo aéreo no tripulado (UAV - "unmanned air vehicle"),
particularmente un UAV pequeño. La plataforma de lanzamiento/captura incluye un bastidor, un suelo asegurado al bastidor que es capaz de soportar el UAV y medios para captar y realizar un seguimiento del UAV en vuelo. Un brazo robótico maniobra la plataforma y facilita la captura del UAV que se aproxima. La plataforma responde a la información sobre la posición relativa proporcionada por el UAV, y es capaz de mover los medios de captura a la posición y altitud del UAV que se aproxima. El UAV capturado puede asegurarse en la plataforma o lanzarse desde la misma
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2006/016528.
Solicitante: LOCKHEED MARTIN CORPORATION.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 6801 ROCKLEDGE DRIVE BETHESDA MARYLAND 20817 ESTADOS UNIDOS DE AMERICA.
Inventor/es: STEELE,DANIEL W.
Fecha de Solicitud: 1 de Mayo de 2006.
Fecha de Publicación: .
Fecha de Concesión: 23 de Noviembre de 2011.
Clasificación PCT:
- B64F1/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64F INSTALACIONES EN TIERRA O INSTALACIONES EN CUBIERTA DE PORTAAVIONES ESPECIALMENTE ADAPTADAS PARA SU USO EN CONEXIÓN CON AERONAVES; DISEÑO, FABRICACIÓN, ENSAMBLAJE, LIMPIEZA, MANTENIMIENTO O REPARACIÓN DE AERONAVES, NO PREVISTOS EN OTRO LUGAR; MANIPULACIÓN, TRANSPORTE, ENSAYO O INSPECCIÓN DE COMPONENTES DE AERONAVES, NO PREVISTOS EN OTRO LUGAR. › B64F 1/00 Instalaciones en tierra o instalaciones en cubierta de portaaviones (adaptadas especialmente para aeronaves cautivas B64F 3/00). › Dispositivos de frenado; Barreras líquidas.
- B64F1/04 B64F 1/00 […] › Dispositivos de lanzamiento o de remolque.
Fragmento de la descripción:
Plataforma de lanzamiento/captura asistida por robot para un vehículo aéreo no tripulado.
Datos de solicitud relacionada
Esta solicitud está relacionada con la Solicitud norteamericana de Nº de Serie 10/908.278, depositada el 05/05/2005 y titulada "Sistema de control autónomo del entorno ambiental y método para la gestión posterior a la captura y previa al lanzamiento de un vehículo aéreo no tripulado" ("Autonomous environmental control system and method for post-capture and pre-launch management of an unmanned air vehicle"), depositada de forma concurrente con la presente e incorporada aquí como referencia en su totalidad, hasta la extensión más completa permisible.
Campo de la invención
Realizaciones de la invención pertenecen al control de una aeronave o vehículo aéreo no tripulado (UAV - "unmanned air vehicle") y, más particularmente, a una plataforma de lanzamiento/captura asistida por robot para un UAV pequeño.
Antecedentes de la invención
El uso de UAVs para encargarse de la vigilancia o realizar otros vuelos en misión de transporte de carga en entornos ambientales remotos y/u hostiles o en condiciones peligrosas tiene beneficios significativos. El más evidente de estos beneficios es que se evita la exposición de personas a estos entornos ambientales. Otros beneficios se derivan de la posibilidad de equipar un UAV con instrumentos y sensores de recogida de datos que proporcionan la capacidad de recoger una gran cantidad de datos a través de una gran área de recogida de datos, o bien datos físicamente peligrosos, sin la intervención humana.
Los dos contextos de misión más comunes para UAVs pequeños implican una plataforma anfitriona o nodriza con base en tierra y móvil, tal como un camión o un trailer o remolque, por ejemplo, y una plataforma nodriza con base en un barco, lo que incluye embarcaciones de aguas profundas y de aguas poco profundas. Las plataformas para misiones con base en un barco presentan los entornos ambientales más rigurosos o exigentes, particularmente para capturar un UAV en vuelo. Las plataformas de embarcación pueden ser altamente inestables debido al balanceo, al cabeceo y a la desviación con respecto a la dirección del rumbo o guiñada, así como a otros movimientos impredecibles de la embarcación en aguas agitadas, al igual que al movimiento de avance. Además, los UAVs de alas fijas y de pequeño tamaño, del orden de entre 4,57 kg y 137,1 kg (de 10 a 300 libras), y, nominalmente, de aproximadamente 45,7 kg (100 libras), son altamente vulnerables a la turbulencia provocada por movimientos del aire que se originan en la superestructura de la nave y a los vientos dominantes, y el UAV puede tener que ser capturado y estabilizado dentro de un espacio muy limitado de una cubierta ya abarrotada.
Los sistemas de captura de tipo de red convencionales y los sistemas de cable vertical conocidos en la técnica adolecen de un cierto número de desventajas. Es conocido que ambas soluciones de sistema captura llevan consigo altas probabilidades de daños en el UAV. Estos tipos de sistemas requieren la asistencia de personas para completar él procedimiento de recuperación más allá de una simple captura o enganche del UAV. Tanto el peso como la envergadura de ala a ala del UAV que es capturado pueden tener un impacto significativo en estos tipos de sistemas de captura. Por ejemplo, un sistema de red requiere un área de captura que cubra toda una abertura de captura pretendida, en lugar de simplemente el espacio situado directamente enfrente del UAV que se aproxima. Este requisito puede inmiscuirse significativamente en las estructuras de a bordo y en las operaciones de cubierta. El barco nodriza ha de ser controlado en su posición angular y velocidad para convertirse en un objetivo cuasi-estable para que el UAV apunte a él. Los errores en la desviación de la dirección del rumbo y en el curso del UAV que dan lugar a un contacto inicial no perpendicular con la red pueden provocar el enganchón de la punta de un ala, lo que da lugar a fuerzas de inercia que son magnificadas en proporción a la longitud del ala, y al subsiguiente daño en el ala. El riesgo de daños puede combinarse con la sacudida aerodinámica subsiguiente mientras el UAV está siendo capturado dentro de la red y está expuesto a los vientos reinantes o producidos por la velocidad de la plataforma. La extracción manual del UAV de la red ha de realizarse cuidadosamente para evitar el trabado o la destrucción del UAV durante su traslado hasta el almacenamiento y la descarga de datos. No se conoce que los sistemas de captura con red convencionales tengan un mecanismo de retención en reposo del UAV.
Los sistemas de captura de cable vertical se interponen, de la misma manera, con las estructuras de a bordo y las operaciones de cubierta. Imponen también limitaciones en la posición angular y en la velocidad de la estructura de captura con base en el barco. Un UAV que es capturado por un sistema de cable vertical contacta inicialmente con el cable en algún punto a lo largo de un ala, lo que provoca que el cable, de una manera sesgada u oblicua, se desplace descendiendo por el borde de ataque de la punta del ala, donde es retenido por un gancho situado en el extremo del ala. Esto provoca que todo el UAV pase rápidamente de estar volando a ciabogar en torno al cable de captura. Por último, el impulso del UAV se reduce a cero, por lo que queda colgado en el aire de manera que es sacudido aerodinámicamente por los vientos reinantes y relativos, mientras es asegurado manualmente y hecho descender hasta la cubierta.
Además, estos tipos de sistemas no pueden ser utilizados para el lanzamiento del UAV, por lo que se requiere un sistema de lanzamiento independiente. Si bien un sistema móvil puede acometer algunos de estos aspectos, incluso UAVs pequeños pueden generar fuerzas de inercia significativas durante la aceleración del lanzamiento de la deceleración de la recuperación, lo que requiere una plataforma que tenga estabilidad inercial, reñida con una movilidad adaptable.
De acuerdo con ello, existe una reconocida necesidad de un dispositivo que tenga la capacidad de lanzar y capturar un UAV pequeño desde, y en, una plataforma nodriza, móvil e inestable. Semejante dispositivo se beneficia de ser ligero de peso y robusto, altamente maniobrable y adaptable a los movimientos incontrolados del UAV y a los desplazamientos por fuerzas de inercia, generados durante el lanzamiento y la captura, compacto de tamaño y capaz de un funcionamiento completamente automatizado. Se constata adicionalmente la necesidad de que tal dispositivo pueda, de una forma consistente y segura, lanzar y recuperar un UAV pequeño.
Sumario de la invención
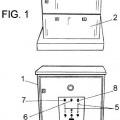
Una realización de la invención está encaminada a una plataforma para el lanzamiento y/o la captura de una aeronave o vehículo aéreo no tripulado (UAV - "unmanned air vehicle"), particularmente un UAV pequeño. Tal y como se utiliza aquí, la expresión "UAV pequeño" se refiere a un vehículo aéreo no tripulado y de alas fijas que tiene un peso que oscila entre aproximadamente 4,57 kg (10 libras) y 137,1 kg (300 libras), y que, nominalmente, pesa aproximadamente 45,7 kg (100 libras) o menos. La plataforma de lanzamiento/captura incluye un bastidor, un suelo asegurado al bastidor y que es capaz de soportar el UAV, medios para captar y realizar un seguimiento del UAV en vuelo, un dispositivo conectador y un controlador del dispositivo conectador, que unen la plataforma con una estructura de soporte externa, proporcionando un movimiento controlable y adaptativo de la plataforma en respuesta a la posición y a la desviación de la dirección del rumbo del UAV en aproximación, medios para lanzar el UAV desde la plataforma y para capturar un UAV en vuelo hacia la plataforma, y medios para retener en reposo el UAV entre la captura y el lanzamiento del UAV. En un aspecto particular,la estructura de soporte externa a la que está unida de forma controlable la plataforma, es un brazo de robot controlable que tiene una base en uno de sus extremos para el afianzamiento seguro a una plataforma nodriza, y que está asegurado a la plataforma por el otro extremo del mismo a través del dispositivo conectador controlable. De acuerdo con un aspecto, el bastidor de la plataforma tiene un miembro de base y dos miembros de brazo que se extienden transversalmente desde respectivas regiones de extremo del miembro de base para formar una estructura de U generalmente cuadrada. De acuerdo con un aspecto, los medios para lanzar el UAV desde la plataforma y capturar un UAV en vuelo hacia la plataforma se fundamentan en sistemas...
Reivindicaciones:
1. Una plataforma de lanzamiento/captura para un vehículo aéreo no tripulado (UAV - "unmanned air vehicle"), que comprende:
un bastidor, que tiene un par de miembros de brazo, cada uno de los cuales se extiende transversalmente desde un miembro de base y que tienen, cada uno, un extremo libre;
un suelo, fijado al bastidor y capaz de soportar el UAV;
medios para captar y efectuar un seguimiento del UAV;
un dispositivo conectador, que acopla de forma cooperativa la plataforma a una estructura de soporte externa, y un controlador de dispositivo conectador, de tal manera que el dispositivo conectador y el controlador asociado proporcionan un movimiento controlable y adaptativo (de forma instantánea o en tiempo real) de la plataforma;
medios para lanzar y capturar el UAV desde, y en, la plataforma, respectivamente; y
medios para retener en reposo el UAV entre el estado de captura y el estado de lanzamiento.
2. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 1, en la cual la estructura de soporte externa comprende un brazo de robot que tiene una base en uno de los extremos del mismo para estabilizar el brazo de robot, y en la que, adicionalmente, el brazo está unido por otro extremo del mismo al dispositivo conectador, y a un controlador de brazo de robot asociado.
3. La plataforma de lanzamiento/captura de acuerdo con reivindicación 2, en la cual el brazo de robot tiene hasta seis ejes independientes de movimiento controlable.
4. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 1, en la cual el dispositivo conectador y el controlador proporcionan un movimiento basculante y variable de forma continua de la plataforma entre una orientación relativa horizontal y una orientación relativa vertical.
5. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 1, en la cual los medios para capturar y efectuar el seguimiento del UAV incluyen un sistema GPS diferencial.
6. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 1, en la cual los medios para captar y efectuar el seguimiento del UAV incluyen un sensor para determinar una posición relativa entre la plataforma y unos medios de captura asociados con el UAV.
7. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 6, en la cual los medios para capturar un UAV en vuelo incluyen una porción de cable de detención, y en la que, adicionalmente, el sensor está destinado a determinar una posición relativa entre la porción de cable de detención y unos medios de captura asociados con el UAV.
8. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 6, en la cual el sensor está colocado en la plataforma.
9. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 6, en la cual el sensor está situado alejado de la plataforma.
10. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 1, en la cual los medios para captar y efectuar el seguimiento del UAV incluyen al menos dos sensores para detectar unos indicadores de la orientación del UAV.
11. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 10, en la cual los al menos dos sensores son al menos dos cámaras de televisión.
12. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 10, en la cual los al menos dos sensores son sensibles a la iluminación de infrarrojos o IR.
13. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 1, en la cual los medios para lanzar el UAV desde la plataforma incluyen un sistema de catapulta.
14. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 1, en la cual los medios para capturar un UAV en vuelo incluyen al menos dos ruedas de arrastre que incluyen un control de arrastre.
15. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 1, en la cual el control de arrastre incluye un control diferencial para cada una de las ruedas de arrastre.
16. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 1, que comprende adicionalmente al menos un sensor para detectar al menos una de entre una velocidad del viento y una dirección del viento.
17. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 1, en la cual el suelo comprende una estructura de malla.
18. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 1, en la cual el suelo comprende una superficie de rozamiento (del tipo de Velcro).
19. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 1, en la cual el suelo comprende un electroimán.
20. Una plataforma de lanzamiento/captura para un vehículo aéreo no tripulado (UAV - "unmanned air vehicle"), que comprende:
un bastidor, que tiene un par de miembros de brazo, cada uno de los cuales se extiende desde un miembro de base y que tienen, cada uno, un extremo libre;
un suelo, fijado al bastidor y capaz de soportar el UAV;
un sensor de captación y seguimiento del UAV, acoplado cooperativamente con la plataforma;
un sistema de cable de detención, destinado a proporcionar soporte para el lanzamiento y la captura del UAV, acoplado cooperativamente con la plataforma, y que incluye un cable de detención, un motor, un sensor de estiramiento y una pluralidad de controladores de arrastre, de tal manera que una porción variable del cable de detención se extiende entre los extremos libres de los miembros de brazo;
un dispositivo conectador controlable, que acopla de forma cooperativa la plataforma a una estructura de soporte externa y que tiene un intervalo de movimiento controlado por una señal de realimentación suministrada por el sensor de captación y seguimiento; y
un mecanismo de retención en reposo, destinado a asegurar el UAV entre estado de captura y el estado de lanzamiento.
21. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 20, en la cual el dispositivo conectador controlable tiene un intervalo variable de forma continua de movimiento basculante entre una orientación relativa horizontal y una orientación relativa vertical.
22. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 20, en la cual la estructura de soporte externa es un brazo de robot controlable.
23. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 20, en la cual el sensor de captación y seguimiento comprende un sistema GPS diferencial.
24. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 20, en la cual el sensor de captación y seguimiento comprende una cámara de televisión.
25. La plataforma de lanzamiento/captura de acuerdo con la reivindicación 24, en la cual el sensor de captación y seguimiento comprende al menos dos cámaras de televisión, destinadas a la visión infrarroja.
26. Un método para capturar un UAV pequeño en vuelo, que comprende:
proporcionar una plataforma de captura del UAV;
proporcionar unos medios de captura del UAV como componente integrado de la plataforma;
proporcionar medios para determinar de forma inmediata o en tiempo real la posición relativa de una porción de acoplamiento de los medios de captura con respecto a un UAV en vuelo que se aproxima;
proporcionar medios para hacer maniobrar automáticamente la porción de acoplamiento de los medios de captura con respecto a al menos una de entre una posición y una desviación de la dirección del rumbo del UAV en vuelo que se aproxima;
capturar el UAV; y
asegurar el UAV capturado a la plataforma de captura.
27. El método de acuerdo con la reivindicación 26, en el cual proporcionar una plataforma de captura del UAV comprende adicionalmente proporcionar una plataforma común para el lanzamiento y la captura del UAV.
28. El método de acuerdo con la reivindicación 27, en el cual proporcionar unos medios de captura del UAV como componente integrado en la plataforma, comprende adicionalmente proporcionar unos medios de lanzamiento del UAV como componte integrado en la plataforma.
29. El método de acuerdo con la reivindicación 28, que comprende adicionalmente lanzar el UAV.
Patentes similares o relacionadas:
Sistema de orientación de un dron, del 2 de Octubre de 2019, de PARADOX ENGINEERING SA: Sistema de orientación para un dron , que comprende: - una pluralidad de dispositivos que se interconectan en una red inalámbrica […]
Material absorbente de energía en capas suspendido para sistemas de detención de vehículos, del 10 de Abril de 2019, de ENGINEERED ARRESTING SYSTEMS CORPORATION: Estructura en capas de sistema de detención de vehículos, que comprende: al menos una parte superior suspendida de material absorbente de energía […]
Dispositivo de aterrizaje para el aterrizaje de un avión cargado en el sentido de la envergadura, del 30 de Octubre de 2018, de Airbus Defence and Space GmbH: Un dispositivo de aterrizaje para el aterrizaje de un avión sobre el mismo, comprendiendo el dispositivo de aterrizaje […]
Aridos estabilizados y otros materiales y estructuras para finalidades que incluyen, pero no se limitan, a la absorción de energía, del 21 de Marzo de 2018, de ENGINEERED ARRESTING SYSTEMS CORPORATION: Estructura de absorción de energía para frenar una aeronave que se desplaza a lo largo de una superficie de una pista de aterrizaje, configurada dicha estructura de absorción […]
Unidades de detención de vehículos resistentes al impacto de chorros de reactores y provistas de cubierta, lecho y métodos de fabricación, del 24 de Agosto de 2016, de ENGINEERED ARRESTING SYSTEMS CORPORATION: Una unidad de detención de vehículos susceptible de utilizarse para la detención de un vehículo, que comprende: i) un bloque de material compresible, que tiene […]
Lecho de intercepción para vehículos, del 18 de Mayo de 2016, de NORSK GLASSGJENVINNING AS: Sistema de intercepción de vehículos, en el que el sistema comprende: - una zona de intercepción de vehículos que comprende un lecho relleno de […]
 Armario modular para control y monitorización del sistema de levantamiento de barreras de frenado, del 27 de Agosto de 2015, de CONSULTORIA Y CALIBRACIÓN S.L: 1. Armario modular para control y monitorización del sistema de levantamiento de barreras de frenado, previsto para controlar la operación de levantamiento […]
Armario modular para control y monitorización del sistema de levantamiento de barreras de frenado, del 27 de Agosto de 2015, de CONSULTORIA Y CALIBRACIÓN S.L: 1. Armario modular para control y monitorización del sistema de levantamiento de barreras de frenado, previsto para controlar la operación de levantamiento […]
 Sistema de recuperación de vehículos aéreos no tripulados, del 18 de Abril de 2012, de THE BOEING COMPANY: Sistema de recuperación de un vehículo aéreo no tripulado en vuelo, que comprende un vehículo aéreo no tripulado y un aparato de recuperación (30; 60; […]
Sistema de recuperación de vehículos aéreos no tripulados, del 18 de Abril de 2012, de THE BOEING COMPANY: Sistema de recuperación de un vehículo aéreo no tripulado en vuelo, que comprende un vehículo aéreo no tripulado y un aparato de recuperación (30; 60; […]