MÉTODO Y MÁQUINA PARA MECANIZAR COMPONENTES DE MADERA O SIMILARES.
Un método para mecanizar componentes de madera (2) o similares,
en particular componentes (2) para puertas y marcos de ventana, en un máquina que comprende una base (3); un dispositivo de sujeción (23) para al menos un componente (2); un cabezal de funcionamiento (12) para mecanizar componentes (2); y un conjunto de agarre y transporte (15, 25) para transferir los componentes (2) que se van a mecanizar y/o los componentes recién mecanizados (2) entre al menos una primera estación de suministro (30, 33) y el dispositivo de sujeción (23), estando el método caracterizado por que comprende las etapas de: suministrar los componentes (2) que se van a mecanizar a la primera estación de suministro (30, 33) por medio de un primer carro móvil (41) que tiene una pluralidad de planos de reposo de superposición recíproca (P3); transferir cada componente (2) que se va a mecanizar desde el plano de reposo correspondiente (P3) a un primer dispositivo de elevación (37) móvil entre los planos de reposo (P3); y transferir cada componente (2) que se va a mecanizar desde el primer dispositivo de elevación (37) al conjunto de agarre y transporte (15, 25)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09154162.
Solicitante: BIESSE S.P.A..
Nacionalidad solicitante: Italia.
Dirección: VIA DELLA MECCANICA, 16 61100 PESARO ITALIA.
Inventor/es: BERNARDI,PAOLO.
Fecha de Publicación: .
Fecha Solicitud PCT: 2 de Marzo de 2009.
Clasificación Internacional de Patentes:
- B27M1/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B27 TRABAJO O CONSERVACION DE LA MADERA O DE MATERIALES SIMILARES; MAQUINAS PARA CLAVAR, GRAPAR O COSER EN GENERAL. › B27M TRABAJO DE LA MADERA NO PREVISTO EN LAS SUBCLASES B27B - B27L; FABRICACION DE ARTICULOS PARTICULARES DE MADERA. › B27M 1/00 Trabajo de la madera no previsto en las subclases B27B - B27L, p. ej. por estirado. › por procedimientos en varias etapas.
Clasificación PCT:
- B27M1/08 B27M 1/00 […] › por procedimientos en varias etapas.
- B65G65/00 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › Carga o descarga (de vehículos B65G 67/00).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2361706_T3.pdf
Fragmento de la descripción:
La presente invención se refiere a un método para mecanizar componentes de madera o similares, específicamente componentes para puertas y marcos de ventana.
En el campo del mecanizado de componentes de puertas y marcos de ventana existen máquinas conocidas del tipo que comprenden una base alargada provista con dos miembros de guía longitudinales, una pluralidad de travesaños que se acoplan de forma deslizante a los miembros de guía longitudinales, al menos un tornillo de banco de sujeción montado a cada travesaño para bloquear los componentes que se van a mecanizar, una grúa móvil a lo largo de la base en una primera dirección y un cabezal de funcionamiento móvil a lo largo de la grúa en una segunda dirección trasversal a la primera dirección.
La grúa está provista generalmente de un conjunto de agarre y transporte móvil a lo largo de la grúa en la segunda dirección y adaptado para transferir los componentes que se van a mecanizar y los componentes recién mecanizados entre los tornillos de banco de sujeción correspondientes y un dispositivo de suministro para los componentes en sí mismos.
Un ejemplo de estas máquinas se describe en el documento EP 1 992 464 A, que es el estado de la técnica según el Art. 54 (3) EPC.
Normalmente, se usan tres tipos de dispositivos de suministro en las máquinas conocidas del tipo que se ha descrito anteriormente.
De acuerdo con un primer tipo, el dispositivo de suministro comprende una única cinta transportadora, que se extiende en la segunda dirección y se motoriza para suministrar intermitentemente los componentes que se van a mecanizar desde una estación de carga, en la que el operario carga los componentes que se van a mecanizar en secuencia sobre la cinta transportadora, a una estación de transferencia, en la que el conjunto de agarre y transporte recoge los componentes que se van a mecanizar desde la cinta transportadora y los transfiere a los tornillos de banco de sujeción correspondientes. Los componentes recién mecanizados se liberan mediante el conjunto de agarre y transporte en la estación de carga, que se despeja en cada momento suministrando los componentes que se van a mecanizar.
De acuerdo con otro tipo, el dispositivo de suministro comprende dos cintas transportadoras de superposición recíproca, una de los cuales se usa para transferir los componentes que se van a mecanizar al conjunto de agarre y transporte y la otra se usa para recibir los componentes recién mecanizados desde el conjunto de agarre y transporte en sí mismo.
De acuerdo con un tercer tipo, el dispositivo de suministro comprende dos cintas transportadoras que se alinean de forma recíproca en la segunda dirección o se disponen en lados opuestos de la base en la primera dirección, una de las cuales se usa para transferir los componentes que se van a mecanizar al conjunto de agarre y transporte y la otra se usa para recibir los componentes recién mecanizados desde el conjunto de agarre y transporte en sí mismo.
Ya que los dispositivos de suministro mencionados deberían tener un tamaño relativamente pequeño para permitir su uso en los sistemas modernos para mecanizar componentes de puertas y marcos de ventana, las máquinas conocidas del tipo que se ha descrito anteriormente tienen algunas desventajas, la mayor parte de ellas derivan de los dispositivos de suministro que no son capaces de manipular grandes cantidades de componentes, proporcionan una autonomía de producción relativamente baja de dichas máquinas e implican la presencia constante de personal para descargar los componentes a y desde los dispositivos de suministro, respectivamente.
Es un objeto de la presente invención proporcionar un método para mecanizar componentes de madera o similares que esté libre de las desventajas que se han descrito anteriormente y que sea simple y rentable de implementarse.
De acuerdo con la presente invención, se proporciona un método para mecanizar componentes de madera o similares, como se reivindica en las reivindicaciones 1 a 7.
La presente invención se refiere adicionalmente a una máquina para mecanizar componentes de madera o similares, específicamente componentes para puertas y marcos de ventana.
De acuerdo con la presente invención, se proporciona una máquina para mecanizar componentes de madera o similares como se reivindica en las reivindicaciones 8 a 16.
La presente invención se describirá ahora con referencia a los dibujos adjuntos, que ilustran una realización no limitante de la misma, en los que:
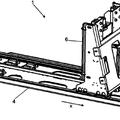
la figura 1 es una vista en planta esquemática de una realización preferida de la máquina de la presente invención; la figura 2 es una vista lateral esquemática, con partes retiradas para la claridad, de la máquina en la figura 1; la figura 3 es una vista en perspectiva esquemática de un detalle de la máquina en las figuras 1 y 2; y la figura 4 es una vista en planta esquemática del detalle en la figura 3.
Con referencia a las figuras 1 y 2, el número 1 indica como un conjunto una máquina para mecanizar componentes de madera 2 o similares para puertas y marcos de ventana que comprenden una base alargada 3, que se extiende en una dirección horizontal 4, tiene sustancialmente forma de U y tiene dos miembros laterales de guía longitudinales 5 que son sustancialmente paralelos a la dirección 4 en sí misma.
La máquina 1 comprende adicionalmente una grúa 6 que comprende, a su vez, un poste vertical 7, que se acopla de una forma conocida a la base 3 para realizar movimientos rectilíneos en la dirección 4, a lo largo de la base 3 en sí misma y bajo la influencia de un dispositivo de accionamiento conocido (no mostrado) y lleva un travesaño 8 conectado a un extremo libre del mismo, que se extiende sobre la base 3 en una dirección horizontal 9 que es transversal a la dirección 4 y se limita lateralmente mediante dos superficies opuestas recíprocas 10, 11 que son sustancialmente ortogonales a la dirección 4 en sí misma.
La grúa 6 soporta un cabezal de funcionamiento 12 de tipo conocido, que se monta a la superficie 10, se acopla de forma conocida al travesaño 8 para realizar, a lo largo del travesaño 8 en sí mismo, movimientos rectilíneos en la dirección 9 y comprende, en este caso, dos electromandriles 13 equipados de una forma conocida sobre el cabezal 12 para moverse en una dirección vertical 14 ortogonal con respecto a las direcciones 4 y 9.
Adicionalmente, la grúa 6 soporta un conjunto de agarre y transporte 15, que comprende un brazo 16, que sobresale desde la superficie 11 del travesaño 8 en la dirección 4, se acopla de una forma conocida al travesaño 8 para realizar movimientos rectilíneos en la dirección 9, a lo largo del travesaño 8 en sí mismo y bajo la influencia de un dispositivo de accionamiento (conocido y no mostrado) y soporta, en este caso, dos dispositivos de agarre y transporte 17, 18, cuyo dispositivo 17 se fija al brazo 16 en la dirección 4 y que el dispositivo 18 se acopla de una forma conocida al brazo 16 para realizar movimientos rectilíneos en la dirección 4, a lo largo del brazo 16 en sí mismo y bajo la influencia de un dispositivo de accionamiento conocido (no mostrado).
Cada dispositivo 17, 18 comprende una mordaza inferior 19, que tiene sustancialmente forma de L y es móvil en la dirección 14 bajo la influencia de un dispositivo de accionamiento (conocido y no mostrado) y una mordaza superior 20 móvil entre una posición de sujeción y una posición de liberación de un componente 2 bajo la influencia de un cilindro accionador 21 fijado a la mordaza 19.
Adicionalmente, la máquina 1 está provista de una pluralidad de travesaños 22, que se denominarán como "bancadas" en lo sucesivo en este documento, se extienden entre los miembros longitudinales 5 en la dirección 9 y se acoplan de forma deslizante a los miembros longitudinales 5 que se van a mover, ya sea manualmente o por medio de dispositivos de accionamiento respectivos (conocidos y no mostrados) a lo largo de los miembros longitudinales 5 en sí mismos en la dirección 4.
Las bancadas 22 soportan una pluralidad de tornillos de banco de sujeción 23, cuya disposición sobre las bancadas correspondientes 22 depende sustancialmente del tamaño de los componentes 2 que se van a mecanizar y de las operaciones de mecanizado que se van realizar sobre los componentes 2 en sí mismos. Cada tornillo de banco de sujeción 23 comprende dos mordazas 24 (solamente una de las mismas se muestra en la figura 1) móviles... [Seguir leyendo]
Reivindicaciones:
1. Un método para mecanizar componentes de madera (2) o similares, en particular componentes (2) para puertas y marcos de ventana, en un máquina que comprende una base (3); un dispositivo de sujeción (23) para al menos un componente (2); un cabezal de funcionamiento (12) para mecanizar componentes (2); y un conjunto de agarre y transporte (15, 25) para transferir los componentes (2) que se van a mecanizar y/o los componentes recién mecanizados (2) entre al menos una primera estación de suministro (30, 33) y el dispositivo de sujeción (23), estando el método caracterizado por que comprende las etapas de:
suministrar los componentes (2) que se van a mecanizar a la primera estación de suministro (30, 33) por medio de un primer carro móvil (41) que tiene una pluralidad de planos de reposo de superposición recíproca (P3); transferir cada componente (2) que se va a mecanizar desde el plano de reposo correspondiente (P3) a un primer dispositivo de elevación (37) móvil entre los planos de reposo (P3); y transferir cada componente (2) que se va a mecanizar desde el primer dispositivo de elevación (37) al conjunto de agarre y transporte (15, 25).
2. Un método de acuerdo con la reivindicación 1 y que comprende adicionalmente la etapa de:
en primer lugar, transferir cada componente recién mecanizado (2) desde el conjunto de agarre y transporte (15, 25) al primer dispositivo de elevación (37) y después desde el primer dispositivo de elevación (37) a un plano de reposo correspondiente (P3) del primer carro (41).
3. Un método de acuerdo con la reivindicación 2, en el que el conjunto de agarre y transporte (15, 25) comprende un primer dispositivo de transferencia (25), que se conecta al primer dispositivo de elevación (37) en la primera estación de suministro (30, 33) y tiene dos planos de suministro de superposición recíproca (P1, P2) y un segundo dispositivo de transferencia (15) móvil a lo largo de la base (3) para transferir los componentes (2) entre el primer dispositivo de transferencia (25) y el dispositivo de sujeción (23); el método que comprende las etapas de:
transferir los componentes (2) que se van a mecanizar desde el primer dispositivo de elevación (37) a un primer (P1) de dichos planos de suministro (P1, P2); y transferir los componentes recién mecanizados (2) desde el segundo dispositivo de transferencia (15) a un segundo (P2) de dichos planos de suministro (P1, P2).
4. Un método de acuerdo con la reivindicación 1 y que comprende adicionalmente la etapa de:
en primer lugar, transferir cada componente recién mecanizado (2) desde el conjunto de agarre y transporte (15, 25) al primer dispositivo de elevación (37) y después desde el primer dispositivo de elevación (37) a un plano de reposo correspondiente (P3) de un segundo carro móvil diferente del primer carro (41).
5. Un método de acuerdo con la reivindicación 1 y que comprende adicionalmente la etapa de:
en primer lugar, transferir cada componente recién mecanizado (2) desde el conjunto de agarre y transporte (15, 25) a un segundo dispositivo de elevación diferente del primer dispositivo de elevación (37), y después desde el segundo dispositivo de elevación a un plano de reposo correspondiente (P3) de un segundo carro móvil diferente del primer carro (41).
6. Un método de acuerdo con la reivindicación 5, en el que el conjunto de agarre y transporte (15, 25) comprende un primer dispositivo de transferencia conectado al primer dispositivo de elevación (37) en la primera estación de suministro (30, 33), un segundo dispositivo de transferencia conectado al segundo dispositivo de elevación en una segunda estación de suministro diferente de la primera estación de suministro (30, 33), y un tercer dispositivo de transferencia (15) móvil a lo largo de la base (3) para transferir los componentes (2) entre dichos primer y segundo dispositivos de transferencia y el dispositivo de sujeción (23); el método que comprende las etapas de:
transferir los componentes (2) que se van a mecanizar desde el primer dispositivo de elevación (37) al primer dispositivo de transferencia; y transferir los componentes recién mecanizados (2) desde el segundo dispositivo de transferencia al segundo dispositivo de elevación.
7. Un método de acuerdo con una cualquiera de las reivindicaciones anteriores, en el que cada plano de reposo (P3) de dicho carro (41) se define por al menos dos cintas transportadoras (44) arrolladas en torno a pares respectivos de poleas (45) y provistas con un eje de soporte pivotante (46) al que se monta una polea (45) de cada cinta transportadora (44); el método que comprende las etapas de:
conectar el eje de soporte (46) a un motor eléctrico (47) montado en dicha estación de suministro correspondiente (30, 33); y accionar el motor eléctrico (47) ya sea para mover los componentes (2) que se van a mecanizar en dicha estación de suministro correspondiente (30, 33) o para liberar los componentes recién mecanizados (2) de dicha estación de suministro correspondiente (30, 33).
8. Un máquina para mecanizar componentes de madera (2) o similares, específicamente componentes (2) para puertas y marcos de ventana, que comprende una base (3); un dispositivo de sujeción (23) para al menos un componente (2); un cabezal de funcionamiento (12) para mecanizar componentes (2); y un conjunto de agarre y transporte (15, 25) para transferir los componentes (2) que se van a mecanizar y/o los componentes recién mecanizados (2) entre al menos una primera estación de suministro (30, 33) y el dispositivo de sujeción (23); y caracterizada por que comprende adicionalmente un primer carro (41) que tiene una pluralidad de planos de reposo de superposición recíproca (P3) y es móvil para suministrar los componentes (2) que se van a mecanizar a la primera estación de suministro (30, 33) y un primer dispositivo de elevación (37) móvil entre los planos de reposo (P3) para transferir cada componente (2) que se va a mecanizar desde el plano de reposo correspondiente (P3) al conjunto de agarre y transporte (15, 25).
9. Una máquina de acuerdo con la reivindicación 8, en la que el conjunto de agarre y transporte (15, 25) es móvil a lo largo de la base (3) para transferir los componentes recién mecanizados (2) desde el dispositivo de sujeción (23) al primer dispositivo de elevación (37).
10. Una máquina de acuerdo con la reivindicación 8, en la que el conjunto de agarre y transporte (15, 25) comprende un primer dispositivo de transferencia (25), que se conecta al primer dispositivo de elevación (37) en la primera estación de suministro (30, 33) y tiene dos planos de suministro de superposición recíproca (P1, P2) y un segundo dispositivo de transferencia (15) móvil a lo largo de la base (3) para transferir los componentes (2) que se van a mecanizar a partir de un primer (P1) de dichos planos de suministro (P1, P2) al dispositivo de sujeción (23) y los componentes recién mecanizados (2) desde le dispositivo de sujeción (23) a un segundo (P2) de dichos planos de suministro (P1, P2).
11. Una máquina de acuerdo con la reivindicación 8 y que comprende adicionalmente un segundo carro móvil que es diferente del primer carro (41), tiene una pluralidad de planos de reposo de superposición recíproca (P3) y se adapta para recibir los componentes recién mecanizados (2) desde el primer dispositivo de elevación (37).
12. Una máquina de acuerdo con la reivindicación 8 y que comprende adicionalmente un segundo dispositivo de elevación, que es diferente del primer dispositivo de elevación (37) y se adapta para recibir los componentes recién mecanizados (2) desde el conjunto de agarre y transporte (15, 25), y un segundo carro móvil, que es diferente del primer carro (41) y tiene una pluralidad de planos de reposo de superposición recíproca (P3) adaptados para recibir los componentes recién mecanizados (2) del segundo dispositivo de elevación.
13. Un mecanizado de acuerdo con la reivindicación 12, en el que el conjunto de agarre y transporte (15, 25) comprende un primer dispositivo de transferencia conectado al primer dispositivo de elevación (37) en la primera estación de suministro (30, 33) para recibir los componentes (2) que se van a mecanizar desde el primer dispositivo de elevación (37) en sí mismo, un segundo dispositivo de transferencia conectado al segundo dispositivo de elevación en una segunda estación de suministro diferente de la primera estación de suministro (30, 33) para liberar los componentes recién mecanizados (2) sobre el segundo dispositivo de elevación en sí mismo, y un tercer dispositivo de transferencia (15) móvil a lo largo de la base (3) para transferir los componentes (2) entre el primer y segundo dispositivos de transferencia y el dispositivo de sujeción (23).
14. Una máquina de acuerdo con una cualquiera de las reivindicaciones 8 a 13, en la que cada uno de dicho carro
(41) comprende, para cada plano de reposo (P3), al menos dos cintas transportadoras (44), que definen el plano de reposo (P3) en sí mismo, y se arrollan en torno a pares respectivos de poleas (45) y al menos un eje de soporte pivotante (46) al que se monta una polea (45) de cada cinta transportadora (44).
15. Una máquina de acuerdo con la reivindicación 14, en la que cada una de dicha estación de suministro (30, 33) está provista de un motor eléctrico (47) que tiene un eje de salida (49) que se puede conectar de forma selectiva al eje de soporte (46) de uno de dichos planos de reposo (P3) ya sea para desplazar los componentes correspondientes (2) que se van a mecanizar en dicha estación de suministro correspondiente (30, 33) o para liberar los componentes recién mecanizados correspondientes (2) desde dicha estación de suministro correspondiente (30, 33).
16. Una máquina de acuerdo con la reivindicación 15, en la que el motor eléctrico (47) es móvil selectivamente entre dichos planos de reposo (P3) ortogonalmente con respecto a los planos de reposo (P3) en sí mismos.
Patentes similares o relacionadas:
INSTALACION DE PROCESADO DE MATERIA PRIMA POR CONTROL NUMERICO, del 12 de Mayo de 2020, de MARÍN MARTOS, María Dolores: 1. Instalación de procesado de materia prima por control numérico, que comprende un brazo robot configurado para realizar trabajos sobre la materia […]
Procedimiento para el mecanizado de los bordes de piezas de trabajo en forma de placa, del 19 de Febrero de 2020, de IMA Schelling Deutschland GmbH: Procedimiento para el mecanizado de los bordes de piezas de trabajo en forma de placa, donde las piezas de trabajo se suministran en un circuito […]
Dispositivo de procesamiento con una mesa de piezas de trabajo, del 6 de Noviembre de 2019, de HOMAG GmbH: Dispositivo de procesamiento , en particular para el procesamiento de piezas de trabajo de madera, de materiales de trabajo derivados de la madera, de […]
Dispositivo y procedimiento para posicionar un elemento de sujeción, del 23 de Octubre de 2019, de HOMAG GmbH: Dispositivo para posicionar un elemento de sujeción, que está previsto para fijar una pieza de trabajo en una estación de mecanizado, presentando el […]
 Máquina de mecanización con dispositivo de manipulación para el mecanizado de piezas de trabajo en forma de lámina, del 25 de Septiembre de 2019, de IMA Schelling Deutschland GmbH: Máquina de mecanización para el mecanizado de piezas de trabajo en forma de lámina fabricadas de madera o de materiales sustitutivos de […]
Máquina de mecanización con dispositivo de manipulación para el mecanizado de piezas de trabajo en forma de lámina, del 25 de Septiembre de 2019, de IMA Schelling Deutschland GmbH: Máquina de mecanización para el mecanizado de piezas de trabajo en forma de lámina fabricadas de madera o de materiales sustitutivos de […]
Dispositivo para el procesamiento de piezas de trabajo en forma de barra, como perfiles de ventana o perfiles de puerta, del 11 de Septiembre de 2019, de Schirmer Maschinen GmbH: Dispositivo para el procesamiento de piezas de trabajo en forma de barra, como perfiles de ventana o perfiles de puerta, que se pueden desplazar mediante […]
Dispositivo de mecanizado para piezas de trabajo y procedimiento para el mismo, del 4 de Septiembre de 2019, de HOMAG GmbH: Dispositivo de mecanizado para piezas de trabajo, en particular de madera, plástico o similar, con una primera mesa de piezas de trabajo que puede […]
Método de procesamiento continuo de bordes de placas y dispositivo de procesamiento de bordes, del 3 de Julio de 2019, de ULMADAN-R.D. APS: Un método de procesamiento continuo de bordes de placas , mediante el cual las placas se transportan continuamente en una dirección de […]