MÁQUINA AGRÍCOLA PARA LA RECOLECCIÓN DE FORRAJES.
Máquina agrícola para la recolección de forraje, que comprende un bastidor (1) que soporta por lo menos un dispositivo de recogida (2) de vegetales tumbados en suelo y por lo menos un dispositivo de desplazamiento (4) de los vegetales recogidos,
estando el dispositivo de desplazamiento (4) situado en la proximidad del dispositivo de recogida (2) y desplaza dichos vegetales transversalmente a este último, comprendiendo la máquina además un dispositivo de guiado (7) de los vegetales que se sitúa por lo menos parcialmente por encima y a pequeña distancia del dispositivo de recogida (2) y está soportado por unos brazos (9) que se extienden hacia la parte posterior por encima del dispositivo de desplazamiento (4), caracterizada porque los extremos posteriores de dichos brazos están articulados con respecto al bastidor (1) por medio de ejes (11) sustancialmente horizontales situados, durante el trabajo, por encima de la parte posterior del dispositivo de desplazamiento (4) y alrededor de los cuales pueden pivotar en un cierto ángulo
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2007/051464.
Solicitante: KUHN S.A..
Nacionalidad solicitante: Francia.
Dirección: 4, IMPASSE DES FABRIQUES 67700 SAVERNE FRANCIA.
Inventor/es: GANTZER,Christian , Babler,Damion D.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Junio de 2007.
Clasificación Internacional de Patentes:
- A01D89/00E2
Clasificación PCT:
- A01D89/00 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01D RECOLECCION; SIEGA. › Recogedores para cargadores, tajaderas, prensas de balas, trilladoras de campo o máquinas similares.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
La presente invención se refiere a una máquina agrícola para la recolección de forraje que comprende un bastidor que soporta por lo menos un dispositivo de recogida de vegetales tumbados en el suelo y por lo menos un dispositivo de desplazamiento de los vegetales recogidos, estando el dispositivo de desplazamiento situado en la proximidad del dispositivo de recogida y desplaza dichos vegetales transversalmente a este último.
Esta máquina permite recoger unos vegetales extendidos sobre el suelo y desplazarlos lateralmente con vistas a ponerlos en manojos. Es posible entonces recoger estos manojos por ejemplo por medio de una prensa o de una ensiladora.
Una máquina de este tipo es conocida a partir de la solicitud de patente WO 2005/041638. Esta máquina comprende varios dispositivos de recogida y dispositivos de desplazamiento con el fin de aumentar su anchura de trabajo. En esta máquina los vegetales pueden acumularse por momentos a nivel de cualquiera de los dispositivos de recogida y por ello pasar de una manera irregular sobre el dispositivo de desplazamiento correspondiente. Esto puede provocar el bloqueo del dispositivo de desplazamiento así como la formación de un manojo de volumen no constante que puede perturbar la operación de recogida de éste con la prensa o la ensiladora.
Una máquina de acuerdo con el preámbulo de la reivindicación 1 se describe en el documento EP-A-070 942.
La presente invención tiene en particular por objetivo proponer una máquina que recoge y desplaza los vegetales de una manera más regular.
Con este fin, una importante característica de la invención consiste en que la máquina comprende un dispositivo de guiado de los vegetales que se sitúa por lo menos parcialmente a pequeña distancia por encima del dispositivo de recogida y que está soportado por unos brazos que se extienden hacia la parte posterior por encima del dispositivo de desplazamiento y están articulados con respecto al bastidor por medio de ejes sustancialmente horizontales situados cerca de sus extremos posteriores y alrededor de los cuales pueden pivotar en un cierto ángulo.
Este dispositivo de guiado coopera con el dispositivo de recogida para hacer pasar los vegetales de una manera regular sobre el dispositivo de desplazamiento. Mantiene estos vegetales en contacto con el dispositivo de recogida, lo cual favorece su arrastre por este último y evita así cualquier acumulación nefasta.
Los brazos portadores que se extiende por encima del dispositivo de desplazamiento y que están conectados a unos soportes del bastidor están alejados de los vegetales en desplazamiento. En consecuencia, estos últimos no corren el riesgo en ningún momento de engancharse a dichos brazos y acumularse en ellos.
Las articulaciones de los brazos que soportan el dispositivo de guiado permiten que todo el dispositivo de guiado esté próximo al dispositivo de recogida pudiendo al mismo tiempo alejarse del mismo, respectivamente aproximarse automáticamente en función de la densidad de los vegetales recogidos.
Según otra característica de la invención, los soportes a los que están unidos los brazos portadores están unidos al bastidor por medio de ejes sustancialmente horizontales alrededor de los cuales pueden ser desplazados a diferentes posiciones. Dichos soportes permiten así desplazar el dispositivo de guiado a una posición de trabajo tal como la descrita más arriba y una posición adecuada para el transporte.
Otras características y ventajas de la invención se pondrán más claramente de manifiesto a partir de la descripción siguiente y que hace referencia a los planos adjuntos que representan, a título de ejemplo no limitativo, una forma de realización de la máquina según la invención.
En estos planos:
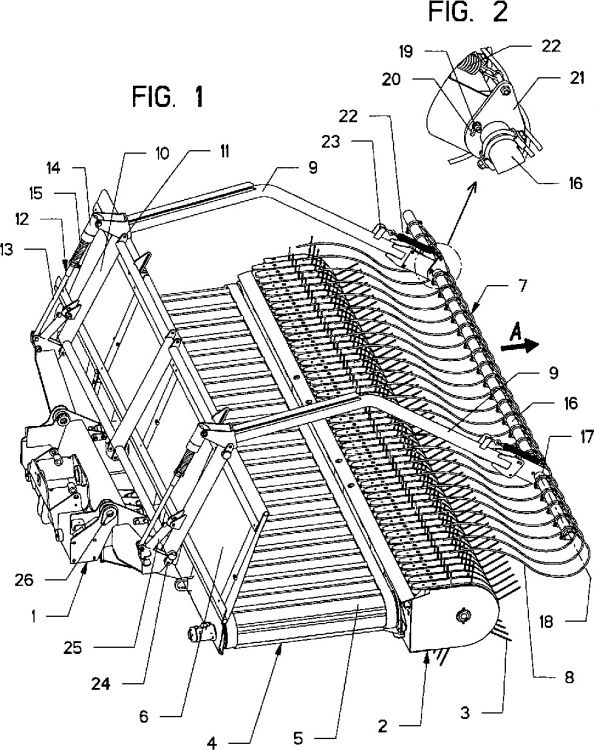
- la figura 1 representa una vista de conjunto de una disposición según la invención en posición de trabajo,
- la figura 2 representa una vista en detalle de la disposición según la figura 1,
- la figura 3 representa una vista lateral de la disposición según la figura 1,
- la figura 4 representa una vista lateral de la disposición en una posición de transporte.
La maquina agrícola según la invención comprende un bastidor (1) que puede estar unido de una manera conocida a un tractor que permite desplazarlo en una dirección de avance (A). Como se desprende de las figuras 1 a 3, este bastidor (1) soporta un dispositivo de recogida (2) de vegetales en el suelo que es el tipo pick-up. Comprende un rotor con unos dientes mandados (3) que es arrastrado en rotación de tal manera que dichos dientes (3) recogen los vegetales a nivel del suelo, los elevan y los proyectan hacia la parte posterior.
En la parte posterior del dispositivo de recogida (2) está previsto un dispositivo de desplazamiento (4) de los vegetales. Este último se sitúa en la proximidad inmediata del dispositivo de recogida (2) de manera que reciba los vegetales proyectados hacia la parte posterior por éste. Este dispositivo de desplazamiento (4) está constituido por una cinta transportadora (5) que es arrastrada durante el trabajo de manera que desplace dichos vegetales transversalmente al dispositivo de recogida (2), hacia el lado derecho o el lado izquierdo de la máquina. Los vegetales son entonces depositados de nuevo en el suelo en forma de un manojo con vistas a su recogida ulterior. En el lado posterior del dispositivo de desplazamiento (4) está dispuesto un deflector (6) sustancialmente vertical que limita la proyección hacia la parte posterior de los vegetales y los hace pasar en su totalidad sobre dicho dispositivo de desplazamiento (4).
La máquina puede comprender varios dispositivos de recogida (2) y dispositivos de desplazamiento (4) dispuestos uno al lado del otro, con vistas a aumentar la anchura de trabajo.
Según la invención, un dispositivo de guiado (7) de los vegetales está dispuesto por lo menos parcialmente por encima y a pequeña distancia del dispositivo de recogida (2). Esta constituido por unos vástagos flexibles (8) que son sustancialmente paralelos y que se extienden desde la parte delantera del dispositivo de recogida (2) hacia la parte posterior aproximándose a los extremos de los dientes (3) de este último. Cuando tiene lugar la recogida por los dientes (3), los vegetales entran en contacto con los vástagos (8) y se deslizan a lo largo de éstos hacia la parte posterior. Estos vástagos (8) mantienen además los vegetales en contacto con los dientes (3) para obtener una conducción regular hacia el dispositivo de desplazamiento (4).
El dispositivo de guiado (7) está soportado por unos brazos (9) que se extienden hacia la parte posterior por encima del dispositivo de desplazamiento (4) y que están unidos cerca de sus extremos posteriores a unos soportes (10) unidos al bastidor (1). Estos brazos (9) son así alejados del dispositivo de recogida (2) y del dispositivo de desplazamiento (4) con el fin de no obstaculizar los desplazamientos de los vegetales.
Los brazos (9) están articulados sobre dichos soportes (10) por medio de ejes (11) sustancialmente horizontales situados cerca de sus extremos posteriores. En posición de trabajo, estos ejes (11) están posicionados por encima de la parte posterior del dispositivo de desplazamiento (4). Los brazos (9) pueden pivotar en un cierto ángulo alrededor de estos ejes (11). Este ángulo de pivotamiento de los brazos (9) alrededor de estos ejes de articulación (11) está limitado por medio de topes (12). Cada uno de estos topes (12) está constituido por un vástago (13) de los que uno de los extremos está articulado sobre el bastidor (1) y el otro extremo está acoplado en un manguito (14) que está articulado sobre el extremo de uno de los brazos (9). El extremo introducido en el manguito (14) está provisto de un escalonado situado entre dos topes dispuestos en los dos extremos de dicho manguito (14). Dichos topes limitan el desplazamiento posible del manguito (14) con respecto al escalonado del vástago (13) y por consiguiente el ángulo de pivotamiento de los brazos (9) del dispositivo de guiado (7) alrededor de los ejes de articulación (11). Entre el vástago (13) y el manguito (14) de cada tope (12) está dispuesto un resorte de compresión (15). Éste ejerce una presión sobre el manguito (14) correspondiente que tiende a hacer pivotar los brazos (9) y el dispositivo de guiado (7) en dirección al dispositivo de recogida (2) con el fin de mantener dicho dispositivo de guiado (7) en contacto con los vegetales desplazados. Además, este resorte (15) amortigua los desplazamientos...
Reivindicaciones:
1. Máquina agrícola para la recolección de forraje, que comprende un bastidor (1) que soporta por lo menos un dispositivo de recogida (2) de vegetales tumbados en suelo y por lo menos un dispositivo de desplazamiento (4) de los vegetales recogidos, estando el dispositivo de desplazamiento (4) situado en la proximidad del dispositivo de recogida (2) y desplaza dichos vegetales transversalmente a este último, comprendiendo la máquina además un dispositivo de guiado (7) de los vegetales que se sitúa por lo menos parcialmente por encima y a pequeña distancia del dispositivo de recogida (2) y está soportado por unos brazos (9) que se extienden hacia la parte posterior por encima del dispositivo de desplazamiento (4), caracterizada porque los extremos posteriores de dichos brazos están articulados con respecto al bastidor (1) por medio de ejes (11) sustancialmente horizontales situados, durante el trabajo, por encima de la parte posterior del dispositivo de desplazamiento (4) y alrededor de los cuales pueden pivotar en un cierto ángulo.
2. Máquina agrícola según la reivindicación 1, caracterizada porque los brazos (9) están articulados por medio de los ejes (11) sustancialmente horizontales sobre unos soportes (10) unidos al bastidor (1).
3. Máquina agrícola según la reivindicación 2, caracterizada porque comprende unos topes
(12) de limitación del ángulo de pivotamiento de los brazos (9) alrededor de sus ejes de articulación (11) sobre los soportes (10).
4. Máquina agrícola según la reivindicación 3, caracterizada porque cada tope (12) está constituido por un vástago (13) unido al bastidor (1) y acoplado en un manguito (14) que está unido a uno de los brazos (9) y que comprende unos topes que limitan los desplazamientos del manguito (14) y del brazo (9) correspondiente con respecto al vástago (13).
5. Máquina agrícola según la reivindicación 4, caracterizada porque comprende un resorte de compresión (15) entre el vástago (13) y el manguito (14) de cada tope (12).
6. Máquina agrícola según la reivindicación 1, caracterizada porque el dispositivo de guiado (7) está alojado en un orificio (17) de cada brazo (9) de manera que puede pivotar alrededor de un eje geométrico longitudinal (18), en un ángulo limitado por medio de topes (19).
7. Máquina agrícola según la reivindicación 6, caracterizada porque comprende por lo menos un resorte de tracción (22) enganchado a un brazo (9) y al dispositivo de guiado (7) de manera que haga pivotar este último alrededor del eje geométrico longitudinal (18) en dirección al dispositivo de recogida (2).
8. Máquina agrícola según la reivindicación 1, caracterizada porque los soportes (10) están unidos al bastidor (1) por medio de ejes sustancialmente horizontales (24) alrededor de los cuales pueden ser desplazados a diferentes posiciones.
9. Máquina agrícola según la reivindicación 8, caracterizada porque unos gatos hidráulicos
(25) están dispuestos entre el bastidor (1) y los soportes (10) para desplazar estos últimos alrededor de sus ejes de articulación (24) a diferentes posiciones.
10. Máquina agrícola según cualquiera de las reivindicaciones anteriores, caracterizada porque los soportes (10) forman con los topes (12), los extremos de los brazos (9) y unas partes del bastidor (1) unos paralelogramos deformables.
Patentes similares o relacionadas:
Equipo de transporte que puede montarse en el lado frontal de una máquina de trabajo guiada manualmente con manceras y que presenta un eje de avance accionado, equipo de transporte que puede conectarse con accionamiento con la máquina de trabajo, del 14 de Marzo de 2019, de RAPID TECHNIC AG: Equipo para la extracción de forraje agrícola segado situado en la superficie segada de suelo, con un equipo de transporte montado en el lado frontal […]
Dispositivo de cosecha para productos agrícolas que tienen una forma alargada, tales como césped, paja, plantas leguminosas, productos de biomasa y similares, del 7 de Marzo de 2019, de ROC s.r.l: Dispositivo de cosecha para productos agrícolas que tienen una forma alargada, tales como césped, paja, plantas leguminosas, productos de biomasa, del tipo trasladables […]
Unidad para transportar productos agrícolas, del 18 de Octubre de 2018, de Kverneland Group Ravenna S.r.l: Una unidad para transportar productos agrícolas, tales como pasto, heno, forraje, trigo, maíz y similares, para máquinas agrícolas del tipo de empacadoras, […]
Recolector de cosecha, del 4 de Abril de 2018, de REITER, THOMAS: Recolector de cosecha con al menos tres medios de avance y al menos un armazón , que conecta los medios de avance , adicionalmente estando previstos unos elementos […]
Dispositivo de seguridad y método de seguridad para máquinas agrícolas, y máquina agrícola correspondiente, del 4 de Octubre de 2017, de Kverneland Group Ravenna S.r.l: Un dispositivo de seguridad para máquinas agrícolas, provisto de un aparato para tratar materiales del tipo de productos agrícolas, equipado […]
Cabezal de recogida que incluye un dispositivo antienrollamiento, del 16 de Agosto de 2017, de KUHN NORTH AMERICA, INC.: Dispositivo de recogida 300, que comprende: una primera placa de extremo 310; una segunda placa de extremo 320 sujeta a la primera placa de extremo 310 […]
Máquina agrícola, del 31 de Mayo de 2017, de Kverneland Group Ravenna S.r.l: Una máquina agrícola para tratamiento de productos agrícolas previamente cortados, tales como pasto, trigo, maíz, heno, forraje y similares, que se distribuyen […]
Dispositivo para cosechar productos agrícolas largos que comprende una unidad transportadora, del 5 de Abril de 2017, de ROC s.r.l: Un dispositivo para cosechado de productos agrícolas largos tal como hierba, paja, legumbres, productos de biomasa y similares, del tipo que […]