SISTEMA DE MODULOS MOVILES PROGRAMABLE PARA LA TRANSFORMACION DE ESPACIOS ARQUITECTONICOS.
Sistema de módulos móviles programable para la transformación de espacios arquitectónicos,
constituido por un conjunto regular de prismas de base triangular (Fig. 2), hexagonal (Fig. 3) o cuadrada (Fig. 1) de dimensiones en planta aproximadas a la anchura de una pisa de escalera o escalinata, que pueden desplazarse verticalmente independientemente en altura, mediante sistema motor controlado por señales emitidas desde un ordenador con software de diseño y control (8), configurando debido a las diferencias de altura entre ellos, elementos ergonómicamente adaptados (Fig. 4) a distintos usos arquitectónicos, como escaleras (2), asientos (5), mesas (6), gradas (3), barandillas (4), cerramientos verticales (1), mostradores (7) y otros volúmenes definidos por alturas libremente programables
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200700840.
Solicitante: ALARCON GARCIA,ALBERTO.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: ALARCON GARCIA,ALBERTO.
Fecha de Solicitud: 29 de Marzo de 2007.
Fecha de Publicación: .
Fecha de Concesión: 31 de Agosto de 2010.
Clasificación Internacional de Patentes:
- E04B1/19 CONSTRUCCIONES FIJAS. › E04 EDIFICIOS. › E04B ESTRUCTURA GENERAL DE LOS EDIFICIOS; MUROS, p. ej. TABIQUES; TEJADOS; TECHOS; SUELOS; AISLAMIENTO Y OTRAS PROTECCIONES DE LOS EDIFICIOS (estructuras de marcos para vanos de puertas, ventanas o similares E06B 1/00). › E04B 1/00 Construcciones en general; Estructuras que no se limitan a los muros, p. ej. tabiques, pisos, techos, ni tejados (andamiajes, encofrados E04G; estructuras adaptadas únicamente a edificios para usos particulares, proyecto general de los edificios, p. ej. coordinación modular E04H; elementos particulares de los edificios, ver los grupos correspondientes a estos elementos). › Estructuras de esqueleto tridimensional.
- E04B1/343B
- E04H12/18B
- E04H12/34 E04 […] › E04H EDIFICIOS O CONSTRUCCIONES SIMILARES PARA EMPLEOS PARTICULARES; PISCINAS PARA NADAR O PARA CHAPOTEAR; MASTILES; BARRERAS; TIENDAS O REFUGIOS PROVISIONALES, EN GENERAL (cimentaciones E02D). › E04H 12/00 Torres; Mástiles, postes; Chimeneas de fábrica; Depósitos de agua elevados; Procesos de edificación de estas estructuras (torres de refrigeración E04H 5/12; soportes para paneles de señalización en ruta E01F 9/60; estacas de cimentaciones E02D 5/22; cimentaciones de mástiles, pilones o chimeneas E02D 27/42; elementos de construcción de forma alargada en general E04C 3/00; escalas metálicas fijas E06C 9/04; torres de perforación de pozos de petróleo E21B 15/00). › Dispositivos para levantar o descender torres, mástiles, postes, cuerpos de chimeneas o análogos.
- G06F17/50
Clasificación PCT:
- E04B1/19 E04B 1/00 […] › Estructuras de esqueleto tridimensional.
- E04B1/343 E04B 1/00 […] › Estructuras caracterizadas por partes móviles, separables o replegables, p. ej. para el transporte (partes de tejado móviles E04B 7/16; construcciones flotantes B63B; pequeños edificios prefabricados, transportables como conjunto, E04H 1/12; pequeños garajes E04H 6/02; tiendas o refugios provisionales, en general E04H 15/00).
- E04H12/18 E04H 12/00 […] › móviles o con secciones móviles, p. ej. giratorias, telescópicas (edificios giratorios E04B 1/346).
- E04H12/34 E04H 12/00 […] › Dispositivos para levantar o descender torres, mástiles, postes, cuerpos de chimeneas o análogos.
- G06F17/50

Descripción:
Sistema de módulos móviles programable para la transformación de espacios arquitectónicos.
La presente invención plantea un sistema para crear espacios arquitectónicos completamente adaptables para distintas funciones, permitiendo mayor flexibilidad de usos. Se dispone para ello de un sistema de módulos tridimensionales programables que se desplazan en vertical.
Se conocen elementos cambiantes en altura constituidos por barras metálicas o de plástico que pueden moverse verticalmente adaptándose a la superficie de objetos.
Se conocen plataformas de grandes dimensiones que pueden desplazarse en altura para configurar la posición de los músicos.
Se conocen sistemas de gradas telescópicas que pueden apilarse horizontalmente.
Se conocen ascensores y montacargas eléctricos que se emplean en plataformas de teatros para permitir el uso modular del espacio a distintas alturas. La modulación de estas plataformas es grande los laterales quedan cubierto y solo puede configurar posiciones predeterminadas, sin una modulación suficientemente flexible.
En la patente americana nº 20050211395 se presenta un sistema de paredes móviles que se almacenan en vertical.
Frente a los sistemas existentes para teatros y gradas telescópicas, la presente invención plantea el uso de elementos móviles indiferenciados, que como píxeles de ordenador tridimensionales pueden configurar cualquier espacio que se adecue a las restricciones modulares planteadas.
El sistema de módulos móviles programable para la transformación de espacios arquitectónicos de la presente invención consiste en un sistema modular móvil para la configuración y delimitación de espacios arquitectónicos, constituido por prismas de base triangular, hexagonal o cuadrada de dimensiones en planta en similares a la huella de una escalera o escalinata que pueden desplazarse en verticalmente independientemente en altura, mediante sistema motor controlado por ordenador, configurando debido a las diferencias de altura entre ellos, elementos ergonómicamente adaptados a distintos usos arquitectónicos, como escaleras, asientos, gradas, barandillas, cerramientos verticales y otros volúmenes libremente programables.
El sistema de módulos móviles consta de prismas móviles y subsistema motor, sistema de control del motor del pixel que acciona el movimiento, un detector de posición de la altura del pixel, un sistema de seguridad que detecta la posición de los usuarios, un ordenador que envía las ordenes de altura a cada uno de los prismas móviles en función de los datos de posición de los usuarios recibidos desde los sistemas de detección. El ordenador dispone un software de control de posición de todo el sistema.
La forma de la base de los prismas responde a sistemas de división del plano en polígonos regulares, y sus posibles variaciones, que permite mayor trabazón entre las distintas piezas móviles que componen el sistema.
De la misma forma que las imágenes de una pantalla de ordenador esta compuesta por píxeles de distintos colores, este espacio esta constituido por píxeles tridimensionales caracterizados por disponer cada uno de ellos a una altura distinta. Cualquier volumen puede ser definido dentro de las limitaciones geométricas del sistema, lo que permite obtener innumerables combinaciones geométricas.
Las aplicaciones del sistema abarcan una amplio abanico de usos arquitectónicos, como auditorios, salas de exposiciones, espacios recreativos, hall de edificios, que permite desarrollar sistemas completamente flexibles de ocupación del espacio. Dado que el sistema esta controlado por ordenador puede reproducir espacios virtuales generados por ordenador, por lo que puede ser utilizado como espacio soporte para realidad virtual.
Un modo de realización de la invención, estaría constituido por una retícula de prismas de base cuadrada de 40x40 cm. y 280 cm. de altura. Cada uno de los prismas esta fijado a un pistón hidráulico, que permite variar la altura de cada 210 cm. La altura de los prismas es controlada por una unidad de ordenador de control (automata) que esta conectada mediante cableado con el sistema de control de todos los pistones, definiendo la velocidad de movimiento y la altura hasta la que debe desplazar cada prisma. Cada prisma dispone de un sensor de posición que permite regular la altura con precisión. Asimismo la parte superior de los primas por las que pueden circular personas cuando éstos están quietos disponen de sensores de posición (presión, infrarrojos), también conectados con la unidad de control por ordenador, de esta forma el ordenador identifica a efectos de seguridad la posición de los usuarios.
Estas y otras ventajas de la presente invención se comprenderán más fácilmente con la ayuda de la descripción siguiente basándose en los dibujos de los planos anexos.
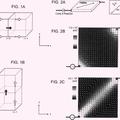
La figura 1 representa una vista en 3 dimensiones con una retícula de prismas de base cuadrada en posición inicial.
La figura 2 representa una vista en 3 dimensiones con los prismas de base cuadrada después de haberse desplazado individualmente en altura creando diferentes usos arquitectónicos: barandilla (4), escalera (2), grada (3) y pared (1).
La figura 3 representa una vista en 3 dimensiones con una retícula de prismas de base triangular en posición inicial.
La figura 4 representa una vista en 3 dimensiones con los prismas de base triangular después de haberse desplazado individualmente en altura creando diferentes usos arquitectónicos: barandilla (4), escalera (2), grada (3) y pared (1).
La figura 5 representa una vista en 3 dimensiones con una retícula con los prismas de base hexagonal en posición inicial.
La figura 6 representa una vista en 3 dimensiones con los prismas de base hexagonal después de haberse desplazado individualmente en altura creando diferentes usos arquitectónicos: barandilla, escalera, grada y pared.
La figura 7 representa una vista en planta de 4 prismas de base cuadrada.
La figura 8 representa una vista en planta de 4 prismas de base cuadrada modificada.
La figura 9 representa una vista en planta de 4 prismas de base triangular.
La figura 10 representa una vista en planta de 4 prismas de base triangular modificada.
La figura 11 representa una vista en planta de 4 prismas de base hexagonal.
La figura 12 representa una vista en planta de 4 prismas de base hexagonal modificada.
La figura 13 representa una sección donde se describe la relación ergonómica entre el hombre y la altura del prisma. En el caso 1 la diferencia de altura entre prismas es tal que se configura una pared de separación. En el caso 2 la diferencia de altura entre prismas es tal que se configura una escalera. En el caso 3 la diferencia de altura entre prismas es tal que se configura una grada. En el caso 4 la diferencia de altura entre prismas es tal que se configura una mesa alta. En el caso 5 la diferencia de altura entre prismas es tal que se configura un asiento. En el caso 6 la diferencia de altura entre prismas es tal que se configura una mesa baja. En el caso 7 la diferencia de altura entre prismas es tal que se configura una barandilla.
La figura 14 representa un organigrama de control del prisma. El elemento 8, es el ordenador de control. El punto 9 es el sensor de posición, que detecta la presencia sobre el prisma. El punto 10 es el prisma que se desplaza en altura. El punto 11 es el sistema motor de pistón hidráulico, que permite que el prisma cambie de altura. El punto 12 es el sistema de iluminación interior del prisma. El punto 13 es el sensor de posición de la altura del prisma. El punto 14, es la electroválvula que controla el pistón hidráulico. El punto 15, es un sensor de presión que indica la presencia de peso o humanos sobre el prisma.
La figura 15 representa una sección es esquemática del sistema motor de los prismas mediante cilindros hidráulicos.
La figura 16 representa una sección esquemática del sistema motor mediante tornillo sin fin.
La figura 17 representa una sección esquemática del sistema motor mediante sistema cremallera.
La figura 18 representa una sección esquemática del sistema motor mediante servomotor.
La figura 19 representa una sección de un mecanismo de apoyo a los sistemas anteriores con contrapeso.
La figura 20 representa una sección de un prisma que puede moverse telescópicamente. Aplicado a prisma de base cuadrada, hexagonal y triangular.
Reivindicaciones:
1. Sistema de módulos móviles programable para la transformación de espacios arquitectónicos, constituido por un conjunto regular de prismas de base triangular (Fig. 3), hexagonal (Fig. 5) o cuadrada (Fig. 1) de dimensiones en planta aproximadas a la anchura de una pisa de escalera o escalinata, que pueden desplazarse verticalmente independientemente en altura, mediante sistema motor controlado por señales emitidas desde un ordenador que incluye software de diseño y control (Fig 14, (8)). Debido a las diferencias de altura entre los prismas se configuran elementos ergonómicamente adaptados (Fig. 13) a distintos usos arquitectónicos, como escaleras (2), asientos (5), mesas (6), gradas (3), barandillas (4), cerramientos verticales (1), mostradores (7) y otros volúmenes definidos por alturas libremente programables. Dispone de un sistema de detección de personas a distancia, mediante sistemas de localización y detección de personas de tipo óptico, térmico o por infrarojos (Fig 14 (9)), y/o sistema de detección de personas mediante sensor (de presión o por infrarrojos) en cada baldosa que configura la parte superior de los prismas, que detectan el lugar que ocupan los usuarios en el sistema de módulos móviles enviando datos al ordenador o autómata de control. Además dispone de una Software de control que permite a partir de las posiciones detectadas por el sistema de detección de personas (Fig 14 (9) y (15)), definir posiciones del sistema de prismas móviles, permitiendo el control de la interacción de los prismas móviles con los usuarios y su seguridad.
2. Un sistema de módulos móviles programable para la transformación de espacios arquitectónicos, según la reivindicación anterior, caracterizado porque la base de los prismas móviles, esta constituida por una retícula de triángulos modificados (Fig. 10), cuadrados modificados (Fig. 8), 6 hexágonos modificados (Fig. 12), que encajan entre sí.
3. Un sistema de módulos móviles programable para la transformación de espacios arquitectónicos, según la reivindicaciones anteriores, caracterizado porque la altura y la posición relativa de los prismas entre sí, está controlada por sensores que miden las variaciones de posición de la altura del prisma(Fig. 14 (13)) y que envían la información al ordenador de control u autómata (Fig. 14 (8)) que controla el movimiento pudiendo ajustar y definir su posición y desplazamientos con precisión.
4. Un sistema de módulos móviles programable para la transformación de espacios arquitectónicos, según cualquiera de las reivindicaciones anteriores, que dispone de un software de control de los prismas móviles en el ordenador de control (Fig 8 (15)) que permite diseñar y programar las posiciones que tendrán los prismas móviles, definiendo la altura de cada uno de ellos y guardar posiciones preestablecidas. A partir de las posiciones de altura definida el ordenador envía ordenes al sistema motor (Fig 14 (11)) para que se produzcan el movimiento de los prismas (Fig 14 (10)). Las posiciones pueden ser definidas desde cualquier ordenador que disponga de este programa y enviadas por Internet.
5. Un sistema de módulos móviles programable para la transformación de espacios arquitectónicos, según cualquiera de las reivindicaciones anteriores caracterizado porque dispone de una Software de control que permite a partir de la posición detectada por el sistema de detección de personas (Fig 14 (9) y (15)), definir posiciones del sistema de prismas móviles, permitiendo el control de la interacción con los usuarios y su seguridad, mientras se produce el movimiento de los prismas.
6. Un sistema de módulos móviles programable para la transformación de espacios arquitectónicos, según cualquiera de las reivindicaciones anteriores caracterizado porque dispone de un sistema de pesos que contrapesan el peso del prisma móvil a levantar y que permite reducir la energía necesaria para que el sistema motor desplace verticalmente los prismas (Fig. 19).
7. Un sistema de módulos móviles programable para la transformación de espacios arquitectónicos, según cualquiera de las reivindicaciones anteriores caracterizado porque el sistema motor es un cilindro hidráulico (Fig. 15) controlado por electroválvulas (Fig 14 (14)) que a su vez reciben las órdenes de cerrado y apertura desde el ordenador o autómata de control.
8. Un sistema de módulos móviles programable para la transformación de espacios arquitectónicos, según reivindicaciones 1 a 8 caracterizado porque el sistema motor es mediante un sistema de poleas (Fig 19) y un servomotor (Fig. 16) que recibe ordenes de movimiento desde el ordenador o automata de control (Fig 14 (8)).
9. Un sistema de módulos móviles programable para la transformación de espacios arquitectónicos, según reivindicaciones 1 a 8 caracterizado porque el sistema motor es un tornillo sin fin que recibe ordenes de movimiento desde el ordenador o autómata de control (Fig. 16).
10. Un sistema de módulos móviles programable para la transformación de espacios arquitectónicos, según reivindicaciones 1 a 8 caracterizado porque el sistema motor es un sistema de cremallera asociada a un motor que recibe ordenes de movimiento desde el ordenador o autómata de control (Fig. 17).
11. Un sistema de módulos móviles programable para la transformación de espacios arquitectónicos, según cualquiera de las reivindicaciones anteriores caracterizado porque consta de un recubrimiento transparente o traslúcido en las paredes y losetas del prisma móvil (Fig 14 (10)) que permite que cada elemento emita luz (Fig 14 (12)) de forma independiente, controlado también por el ordenador de control.
12. Un sistema de módulos móviles programable para la transformación de espacios arquitectónicos, según cualquiera de las reivindicaciones anteriores caracterizado porque el prisma móvil se despliega telescópica mente (Fig. 20).
Patentes similares o relacionadas:
MÉTODO PARA LA OBTENCIÓN DE UN MODELO FÍSICO DE UN OBJETO TRIDIMENSIONAL A PARTIR DE SUPERFICIES DESARROLLABLES Y MODELO FÍSICO ASÍ OBTENIDO, del 2 de Abril de 2020, de UNIVERSIDAD NACIONAL DE COLOMBIA: La presente invención se relaciona con un método para obtener un modelo físico de un objeto tridimensional a partir de un modelo digital de […]
Reconstrucción ósea e implantes ortopédicos, del 12 de Junio de 2019, de Mahfouz, Mohamed Rashwan: Procedimiento de diseño de un implante ortopédico específico para el paciente, en el que el procedimiento comprende: comparar un modelo […]
 Diseño de sobrante sin secciones, del 31 de Mayo de 2019, de Hexagon Manufacturing Intelligence Canada Limited: Un método para el diseño de un sobrante , en donde todo o parte del sobrante se diseña con un enfoque sin secciones, que comprende las etapas de: introducir […]
Diseño de sobrante sin secciones, del 31 de Mayo de 2019, de Hexagon Manufacturing Intelligence Canada Limited: Un método para el diseño de un sobrante , en donde todo o parte del sobrante se diseña con un enfoque sin secciones, que comprende las etapas de: introducir […]
MÉTODO IMPLEMENTADO POR ORDENADOR PARA GENERAR UN MODELO NUMÉRICO DE REPRESENTACIÓN DE UN NÚCLEO MAGNÉTICO PARA UN ELEMENTO DE INDUCCIÓN MAGNÉTICA, del 23 de Mayo de 2019, de SP CONTROL TECHNOLOGIES, S.L: La presente invención es una invención implementada en ordenador que comprende un método para generar un modelo numérico de representación de un […]
Procedimiento de simulación del funcionamiento de un circuito electrónico y programa, del 22 de Mayo de 2019, de Sorbonne Université: Procedimiento de simulación del funcionamiento de un circuito electrónico implementado por ordenador, comprendiendo el circuito electrónico […]
Método de predicción de fractura, dispositivo de procesamiento de cálculo, programa y soporte de registro, del 8 de Mayo de 2019, de NIPPON STEEL & SUMITOMO METAL CORPORATION: Un método implementado por ordenador para predecir una fractura en una parte de objetivo de análisis en un proceso de formación, que comprende: un […]
Método, dispositivo, programa y soporte de registro del análisis de la causa de la retracción, del 8 de Mayo de 2019, de NIPPON STEEL & SUMITOMO METAL CORPORATION: Un método implementado por ordenador para analizar una causa de la retracción en un producto formado que es formado a presión a partir de una placa […]
 Métodos de análisis de campos electromagnéticos para materiales conductores anisotrópicos, del 26 de Abril de 2019, de Subaru Corporation: Un método de análisis del campo electromagnético para un material conductor anisotrópico, en el que el método de análisis del campo electromagnético utiliza […]
Métodos de análisis de campos electromagnéticos para materiales conductores anisotrópicos, del 26 de Abril de 2019, de Subaru Corporation: Un método de análisis del campo electromagnético para un material conductor anisotrópico, en el que el método de análisis del campo electromagnético utiliza […]