PROCEDIMIENTO UNIVERSAL PARA LA PALETIZACION RAPIDA DE OBJETOS Y SISTEMA CORRESPONDIENTE.
Procedimiento para la paletización rápida de objetos (100), que comprende las etapas siguientes:
- disponer los objetos (100) que van a paletizarse sobre un plano de acumulación (400);
- cargar dichos objetos (100) sobre un plano de soporte flexible (31) adecuado para avanzar en la dirección de transferencia de los objetos (100) en una posición sustancialmente coplanaria al plano de acumulación (400) y a continuación del mismo;
- transferir dichos objetos (100) desde el plano de soporte (31) a un plano en movimiento flexible (21) que puede deslizarse entre una posición retraída en la que es coplanario con el plano de soporte (31) y está a continuación del plano de soporte extendido y una posición extendida en la que está a continuación del plano de soporte mientras está en la posición retraída para sustituir este último (31) por debajo de los objetos (100) mientras éstos permanecen estacionarios, en el que la transferencia tiene lugar activando de manera sincronizada el deslizamiento armonioso del plano de soporte (31) y el plano de transferencia (21) dispuestos en contacto entre sí a continuación uno de otro;
- transferir el plano de transferencia (21) con los objetos (100) por encima de un palé;
- hacer que el plano de transferencia (21) se deslice a su posición retraída bajo los objetos (100), que se mantienen estacionarios, para transferirlos al palé: caracterizado porque comprende además:
- dichos objetos (100) son una capa de objetos (100);
- el plano de soporte recibe dichos objetos sin deslizamiento a medida que el plano de soporte (31) alterna en la dirección de transferencia de los objetos (100) entre una posición retraída bajo el plano de acumulación y una posición extendida sustancialmente coplanaria al plano de acumulación (400) y a continuación del mismo
Tipo: Resumen de patente/invención. Número de Solicitud: W06000085IB.
Solicitante: FEON S.R.L.
Nacionalidad solicitante: Italia.
Dirección: VIA ENRICO FERMI, 15,43052 COLORNO.
Inventor/es: BOLZANI,DANTE.
Fecha de Publicación: .
Fecha Concesión Europea: 19 de Agosto de 2009.
Clasificación Internacional de Patentes:
- B65G57/00B
- B65G57/24 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 57/00 Apilado de objetos (B65G 60/00 tiene prioridad; alimentación, apilado de hojas B65H). › siendo las capas transferidas como un conjunto, p. ej. sobre pallets.
Clasificación PCT:
Fragmento de la descripción:
Procedimiento universal para la paletización rápida de objetos y sistema correspondiente.
Campo técnico
La presente invención se refiere a un procedimiento universal y a un sistema correspondiente para la paletización rápida de objetos sueltos o empaquetados de cualquier forma y tipo, como por ejemplo, botellas, latas, paquetes, cartones, haces, etc., según el preámbulo de las reivindicaciones 1 y 10 respectivamente. La paletización consiste en organizar y disponer artículos para posibilitar la utilización de palés de carga en el transporte y almacenamiento de los propios artículos.
Técnica anterior
Como se sabe, con el fin de llevar a cabo la paletización se utilizan paletizadores que comprenden un empujador adecuado para transferir una capa de objetos que van a paletizarse desde un plano de acumulación a un aparato en movimiento que se ocupa de disponerlos sobre un palé.
Tras haber dispuesto la capa sobre el palé, para formar una primera capa, se aplica una capa de cobertura, generalmente de cartón, a través de medios de recogida y liberación, sobre la que es posible disponer otra capa de objetos, recogidos del mismo modo que la primera capa, y así sucesivamente para cada capa de objetos que van a cargarse.
Una vez completada la formación del palé, en ocasiones se dispone un marco protector sobre la última capa de objetos completa con capa de cobertura.
Dichas operaciones llevadas a cabo con paletizadores de la técnica anterior requieren, sobre todo, un tiempo igual a la suma de los tiempos necesarios para llevar a cabo cada operación, puesto que cada una de ellas sólo comienza tras haberse completado la operación anterior.
De hecho, el empujador, tras haber cargado la capa de objetos sobre el cabezal en movimiento, debe salir de la zona de trabajo antes de que el cabezal en movimiento pueda alejarse de la zona de carga, y antes de que otra capa de objetos se disponga sobre el plano de acumulación.
Además, cada capa de cobertura sólo puede disponerse sobre la capa después de que el aparato en movimiento haya dispuesto la capa sobre el palé y haya salido de la zona de trabajo para no interferir con los medios de deposición de la capa de cobertura, durante el trabajo.
El documento US-B1-6 533 533 da a conocer un procedimiento para la paletización de objetos según el preámbulo de la reivindicación 1 y un sistema para la paletización de objetos según el preámbulo de la reivindicación 10.
Descripción de la invención
El objetivo de la presente invención es proporcionar un procedimiento para la paletización que pueda llevar a cabo las operaciones necesarias para la correcta disposición de los objetos encima del palé de un modo más efectivo y eficaz con respecto a la técnica anterior, para llevar a cabo la paletización completa en tiempos sustancialmente más rápidos, dentro del marco de una solución sencilla y racional.
Otro objetivo es proporcionar un sistema apto para llevar a cabo un procedimiento de este tipo y que al mismo tiempo sea compacto y fiable.
Dichos objetivos se alcanzan mediante un procedimiento para la paletización rápida de objetos según la reivindicación 1 y un sistema según la reivindicación 10.
Las reivindicaciones subordinadas dan a conocer formas de realización preferidas y particularmente ventajosas del procedimiento de paletización y del sistema según la invención.
Breve descripción de los dibujos
Otras características y ventajas de la invención se pondrán más claramente de manifiesto a partir de la lectura de la siguiente descripción proporcionada a título de ejemplo no limitativo, con la ayuda de las figuras ilustradas en las tablas adjuntas, en las que:
- las figuras 1 a 6 muestran en sucesión las etapas funcionales para la paletización de objetos a través de un sistema para la paletización rápida según la presente invención;
- la figura 7 muestra una vista del sistema de recogida a lo largo de la línea VII-VII de la figura 4;
- la figura 8 muestra una vista del sistema de recogida a lo largo de la línea VIII-VIII de la figura 4.
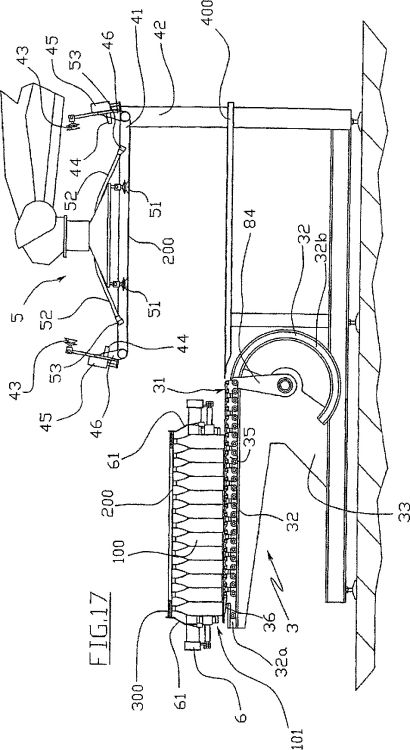
- las figuras 9 a 17 muestran en sucesión las etapas funcionales para la paletización de objetos a través del sistema de la presente invención con la adición de una estación de almacenamiento para láminas de cobertura y armazones.
Modo de poner en práctica la invención
Haciendo referencia a la figura mencionada anteriormente, un sistema para la paletización rápida de objetos según la presente invención se indica globalmente con 1.
Por objetos que van a paletizarse se entienden productos aptos para paletizarse tanto en forma de productos sueltos como los que de algún modo ya están empaquetados.
Dicho sistema 1 comprende básicamente un cabezal en movimiento 2 móvil (figuras 5 a 7, 13 a 15) y un cuerpo de soporte 3 fijo provistos respectivamente de un primer y un segundo plano flexible 21, 31, adecuados para deslizarse respectivamente sobre un par de guías opuestas y paralelas 22, 32, estando cada par asociado con una estructura de bastidor 23, 33 respectiva, adecuada para fijarse a un sistema en movimiento, por ejemplo un robot.
En particular, cada guía 22, 32 se extiende a lo largo de una primera parte horizontal 22a, 32a y una segunda parte circunferencial 22b, 32b consecutivas entre sí. En el ejemplo, cada guía 22, 32 presenta la forma de una garganta con forma de C en la que deslizan los flancos laterales de los planos 21, 31.
En particular, el plano 21 se desliza dentro de las gargantas 22, mientras que el plano 32 desliza sobre las gargantas 31.
Los planos 21, 31 pueden deslizarse entre una posición horizontal tendida en la que soportan una capa 101 de objetos 100 (figuras 9 a 17) que van a paletizarse y una posición de acumulación en la que la dejan caer por gravedad.
En la posición tendida, los planos 21, 31 ocupan las partes horizontales 22a, 32a, mientras que en la posición de acumulación ocupan las partes circunferenciales 22b, 32b, del par respectivo de gargantas 22, 32.
El accionamiento de los planos 21, 31 para deslizarse a lo largo de los pares respectivos de gargantas opuestas 22, 32 se lleva a cabo a través de medios de actuación adecuados, indicados globalmente con 24, 34, para mayor simplicidad ilustrados sólo en las figuras 4 a 8, que se comentarán más adelante.
En el ejemplo ilustrado, cada uno de los dos planos flexibles 21, 31 está formado a partir de una pluralidad de barras cilíndricas 70 (figura 8) dispuestas en paralelo, perpendicularmente a la dirección de deslizamiento y que se mantienen juntas a través de dos cadenas 71 opuestas.
Además, las barras del plano 31 que puede deslizarse entre las guías 32 se soportan completamente por encima de las mismas, a través de abrazaderas 35 adecuadas.
El deslizamiento en las gargantas 22, 32 se facilita mediante unos cojinetes 72 adecuados montados en los extremos de cada barra 70 en la proximidad de las cadenas 71.
Evidentemente, el plano flexible 21 ó 31 puede realizarse mediante un único cuerpo, al igual que el deslizamiento en las gargantas 22, 32 puede llevarse a cabo sin la utilización de cojinetes 72.
Los medios de accionamiento 24, 34, ilustrados con mayor detalle simplemente para el cabezal 2 de transferencia en la figura 8, presentan la forma de un par de bielas 80 asociadas en un extremo con el plano flexible 21, 31 y en el otro extremo fijadas a una barra 81 de tracción en los extremos de la cual están montados dos piñones 82 móviles que se acoplan con un par de cremalleras 83 que se extienden por el exterior de la parte circunferencial 22b, 32b de las gargantas 22, 32.
Los piñones 82 se mantienen acoplados constantemente con las cremalleras 83 a través de un par de brazos rígidos 84, que actúan como separadores, articulados en los flancos de la estructura de bastidor 23, 33 en el eje que conecta los centros de las dos partes circunferenciales opuestas 22b, 32b.
Básicamente, el deslizamiento del plano 21 ó 31 en las gargantas 22 ó 32 se produce accionando los piñones 82 en rotación, que giran en las cremalleras 83 arrastrando el plano 21 ó 31 conectado a través de las bielas 80 a la barra de tracción 81.
El accionamiento de los piñones 82 tiene lugar a través de dos motores 85 de engranaje sincronizados. Para planos flexibles realizados a partir de material ligero...
Reivindicaciones:
1. Procedimiento para la paletización rápida de objetos (100), que comprende las etapas siguientes:
- - disponer los objetos (100) que van a paletizarse sobre un plano de acumulación (400);
- - cargar dichos objetos (100) sobre un plano de soporte flexible (31) adecuado para avanzar en la dirección de transferencia de los objetos (100) en una posición sustancialmente coplanaria al plano de acumulación (400) y a continuación del mismo;
- - transferir dichos objetos (100) desde el plano de soporte (31) a un plano en movimiento flexible (21) que puede deslizarse entre una posición retraída en la que es coplanario con el plano de soporte (31) y está a continuación del plano de soporte extendido y una posición extendida en la que está a continuación del plano de soporte mientras está en la posición retraída para sustituir este último (31) por debajo de los objetos (100) mientras éstos permanecen estacionarios, en el que la transferencia tiene lugar activando de manera sincronizada el deslizamiento armonioso del plano de soporte (31) y el plano de transferencia (21) dispuestos en contacto entre sí a continuación uno de otro;
- - transferir el plano de transferencia (21) con los objetos (100) por encima de un palé;
- - hacer que el plano de transferencia (21) se deslice a su posición retraída bajo los objetos (100), que se mantienen estacionarios, para transferirlos al palé: caracterizado porque comprende además:
- - dichos objetos (100) son una capa de objetos (100);
- - el plano de soporte recibe dichos objetos sin deslizamiento a medida que el plano de soporte (31) alterna en la dirección de transferencia de los objetos (100) entre una posición retraída bajo el plano de acumulación y una posición extendida sustancialmente coplanaria al plano de acumulación (400) y a continuación del mismo.
2. Procedimiento según la reivindicación 1, en el que dichos objetos (100) se cargan sobre el plano de soporte (31) a través de un dispositivo centrador de traslación (6) accionado para trasladarse en sincronía con el deslizamiento del plano de soporte (31).
3. Procedimiento según la reivindicación 2, en el que dichos objetos (100) se compactan mediante el dispositivo centrador de traslación (6) para formar una capa (101) antes de cargarse sobre el plano de soporte (31).
4. Procedimiento según la reivindicación 3, en el que una capa de cobertura (200) y/o un marco (300) se libera sobre dicha capa (101) a través de una estación de almacenamiento (4), antes de cargarse sobre el plano de soporte (31).
5. Procedimiento según la reivindicación 4, en el que dicha estación de almacenamiento (4) es móvil entre una primera posición en la que recibe y sujeta dicha capa de cobertura (200) y/o dicho marco (300) y una segunda posición en la que libera dicha capa de cobertura (200) y/o dicho marco (300) sobre la capa (101), llevándose a cabo el paso desde la primera a la segunda posición con movimiento rectilíneo.
6. Procedimiento según la reivindicación 5, en el que dicha estación de almacenamiento (4), cuando está en dicha primera posición, está fuera de la zona de trabajo con respecto a la zona de trabajo del dispositivo centrador de traslación (6) que carga la capa (101) sobre el plano de soporte (31).
7. Procedimiento según la reivindicación 6, en el que durante la carga de la capa (101) sobre el plano de soporte (31) a través del dispositivo centrador de traslación (6), la estación de almacenamiento (4) recibe y sujeta dicha capa de cobertura (200) y/o dicho marco (300).
8. Procedimiento según la reivindicación 7, en el que dicho dispositivo centrador de traslación (6) mantiene dicha capa de cobertura (200) y/o dicho marco (300) en posición fija, a través de unos medios de bloqueo móviles (61), durante la carga de la capa (101) sobre el plano de soporte (31).
9. Procedimiento según la reivindicación 2, en el que dicho plano de acumulación (400) lleva los objetos (100) en una dirección paralela al deslizamiento del plano de soporte (31).
10. Sistema (1) para la paletización rápida de objetos que comprende:
- - un plano de soporte flexible (31) que puede deslizarse en un primer par de guías paralelas opuestas (22) que comprende una parte horizontal (32a) y una parte circunferencial (32b) consecutivas entre sí, en el que dicho plano de soporte (31) ocupa la parte horizontal (32a) para soportar una carga de objetos (100) que van a paletizarse;
- - un plano en movimiento flexible (21) que puede deslizarse en un segundo par de guías paralelas opuestas (22) que comprende una parte horizontal (22a) y una parte circunferencial (22b) consecutivas entre sí, estando configurados dicho plano de soporte (31) y dicho plano en movimiento (21) para poder transferir dichos objetos (100) desde el plano de soporte (31) al plano en movimiento (21) activando su deslizamiento armonioso en sincronía, siendo apto dicho plano en movimiento (21) para mover dichos objetos (100) hacia una zona de paletización,
caracterizado porque las guías del plano de soporte (31) y del plano en movimiento (21) presentan unos extremos libres separados, proporcionándose unos medios de activación para activar el plano de soporte (31) para alternar entre una posición retraída y una posición extendida en la dirección de transferencia de los objetos, y para activar el plano en movimiento (21) entre una posición retraída en la que es coplanario con el plano de soporte (31) y está a continuación del plano de soporte extendido y una posición extendida en la que está a continuación del plano de soporte mientras está en la posición retraída.
11. Sistema (1) según la reivindicación 10, en el que dicho primer par de guías (32) está formado sobre una estructura de bastidor (33) de un cuerpo de soporte (3) apto para fijarse al suelo.
12. Sistema (1) según la reivindicación 10, en el que dicho segundo par de guías (22) está formado sobre una estructura de bastidor (23) de un cabezal en movimiento (2) adecuado para fijarse a un sistema en movimiento.
13. Sistema (1) según la reivindicación 10, en el que dicho cabezal en movimiento (2) comprende unos medios de contención perimétricos (25) aptos para impedir que los objetos (100) se desplacen durante el deslizamiento armonioso de los planos (21, 31).
14. Sistema (1) según la reivindicación 10, en el que la separación entre las guías (32) que forman el primer par de guías es menor que la separación entre las guías (22) que forman el segundo par de guías.
15. Sistema (1) según la reivindicación 10, en el que dicho plano de soporte (31) y dicho plano en movimiento (21) están provistos en los extremos libres respectivos de unos elementos correspondientes (26, 36) aptos para cooperar haciendo tope durante su deslizamiento armonioso para la transferencia de los objetos (100) desde el plano de soporte (3) al plano en movimiento (2).
16. Sistema (1) según la reivindicación 10, en el que dichos planos (21, 31) comprenden una pluralidad de barras rígidas (70) paralelas entre sí y transversales con respecto a la dirección de deslizamiento para hacerlos flexibles.
17. Sistema (1) según la reivindicación 10, que comprende un brazo de empuje (7) apto para cargar el plano de soporte (3) con los objetos (100) que van a paletizarse.
18. Sistema (1) según la reivindicación 10, que comprende además unos medios de recogida (5) aptos para recoger una capa de capa de cobertura (200) y/o un marco (300), una estación de almacenamiento (4) apta para recibir desde dichos medios de recogida (5) y para sujetar dicha capa de cobertura (200) y/o dicho marco (300), siendo dicha estación (4) móvil con movimiento rectilíneo entre una primera posición en la que recibe dicha capa de cobertura (200) y/o dicho marco (300) y una segunda posición en la que la/lo libera por encima de dichos objetos (100) que van a paletizarse.
19. Sistema (1) según la reivindicación 18, en el que dicha estación (4) comprende un bastidor (41) móvil verticalmente, fijado de manera deslizante a un montante (42), estando provisto dicho bastidor (41) de unos primeros medios (43) para sujetar y liberar dicha capa de cobertura (200) y de unos segundos medios (44) para sujetar y liberar dicho marco (300).
20. Sistema (1) según la reivindicación 19, en el que dichos primeros medios para sujetar y liberar dicha capa de cobertura (200) comprenden una pluralidad de ventosas (43) aptas para adherirse a la superficie de una capa de cobertura (200).
21. Sistema (1) según la reivindicación 18, en el que cada ventosa (43) está articulada a dicho bastidor (41).
22. Sistema (1) según la reivindicación 19, en el que dichos segundos medios para sujetar y liberar dicho marco (300) comprenden una pluralidad de bloques (44) aptos para interferir con por lo menos dos partes opuestas del marco (300), para sujetarlo.
23. Sistema (1) según la reivindicación 22, en el que cada bloque (44) está articulado a dicho bastidor (41) y se acciona para trasladarse a través de un dispositivo elevador (45).
24. Sistema (1) según la reivindicación 21, que comprende un dispositivo centrador de traslación (6) apto para cargar el plano de soporte (31) con los objetos que van a paletizarse, siendo apto dicho dispositivo centrador de traslación (6) para definir una cantidad predeterminada de objetos (100) que van a cargarse.
25. Sistema (1) según la reivindicación 24, en el que dichos medios de bloqueo móviles (61), aptos para mantener dicha capa de cobertura (200) y/o dicho marco (300) soportada/o por encima de dichos objetos (100), están asociados en dicho dispositivo centrador de traslación (6) en una posición fija.
26. Sistema (1) según la reivindicación 25, en el que dichos medios de bloqueo comprenden un par de alas (61) de tope móviles opuestas, que pueden accionarse a través de un sistema articulado de cuatro lados.
Patentes similares o relacionadas:
MÁQUINA PALETIZADORA DE ENVASES Y PROCEDIMIENTO DE UTILIZACIÓN DE LA MISMA, del 30 de Abril de 2020, de AND & OR RESEARCH, S.L.U: Máquina paletizadora de envases y su procedimiento de utilización para conseguir la máxima compactación de los envases en bateas. La máquina comprende un bastidor, en […]
Dispositivo y procedimiento para el paletizado de pilas, del 4 de Marzo de 2020, de WINDMOLLER & HOLSCHER KG: Dispositivo para el paletizado de pilas , en particular de sacos, productos semielaborados de sacos, secciones de tubos flexibles o sacos aplanados, que comprende las […]
Aparato mejorado para paletizar automáticamente recipientes y método respectivo, del 12 de Febrero de 2020, de UNITEC S.P.A: Aparato para cargar una pluralidad de recipientes , particularmente que contienen productos vegetales, sobre palés, que comprende: - un primer conjunto que consiste […]
Dispositivo de detección y método para un dispositivo de transferencia de capa, del 20 de Noviembre de 2019, de Gebo Packaging Solutions Italy SRL: Un método de transferencia para utilizar un dispositivo de transferencia que funciona como dispositivo de desmontaje de palé, a fin de transferir capas preformadas […]
Procedimiento para producir pilas de hojas, del 5 de Junio de 2019, de BW Papersystems Stuttgart GmbH: Procedimiento para producir pilas de hojas en el que está previsto que para salvar una separación vertical entre el nivel de suministro de las hojas […]
Dispositivo de transferencia de capas preconformadas de objetos a la parte superior de una paleta, del 5 de Junio de 2019, de Gebo Packaging Solutions Italy SRL: Dispositivo de transferencia de capas preconformadas de objetos a la parte superior de una paleta estandarizada, que comprende: - una columna de guiado […]
Dispositivo de carga, del 5 de Junio de 2019, de BEUMER Group GmbH & Co. KG: Dispositivo de carga para cargar elementos de carga fraccionada por capas en una superficie de carga , con un cabezal de carga que puede desplazarse al menos […]
Dispositivo de alimentación para alimentar con sacos llenos un dispositivo de paletización, del 17 de Abril de 2019, de WINDMOLLER & HOLSCHER KG: Dispositivo de paletización para una pila de sacos llenos para formar una pila de sacos, que presenta un dispositivo de elevación , así como un dispositivo […]