GRUA TELESCOPICA DE CAMARA.
La grúa telescópica que consiste en el brazo fijo con el equilibrador móvil (29),
montados sobre el soporte, por lo menos dos brazos móviles (2, 3, 4) que se avanzan telescópicamente del brazo fijo (1) y el mecanismo de tracción lineal para mover los brazos móviles (2, 3, 4) caracterizada por:
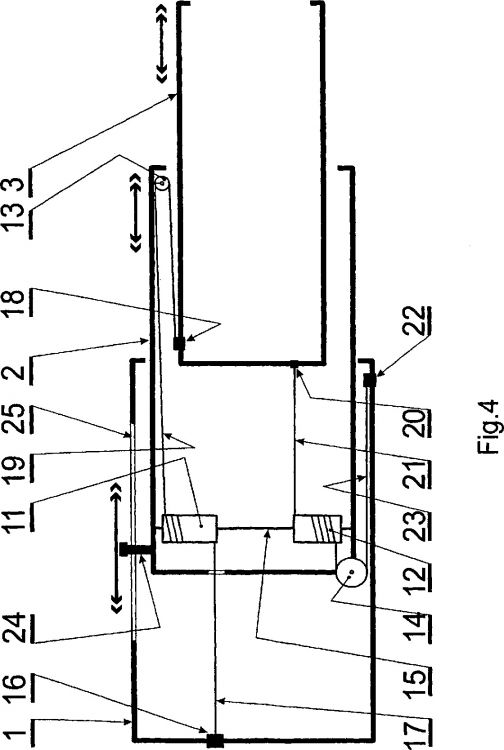
- la tracción del segundo brazo móvil (3, 4), incluye el primer (11) y el segundo (12) tambor del remolque, de la primera (13) y la segunda (14) polea de cuerda y los cuatro tramos (17, 19, 21, 23), de la no extensible cuerda
- Los tambores del remolque (11 y 12) están montados de manera rotativa sobre un eje común (15) fijado al primer brazo móvil (2), es decir, el brazo - que precede al segundo brazo móvil (3)
- La primera (13) y la segunda (14) polea de cuerda se une al primer brazo móvil (2), cerca de su extremo exterior.
- El segundo extremo del primer tramo (17) de la cuerda de tracción está fijado al primer tambor del remolque (11). Al primer tambor del remolque está fijado el primer extremo del segundo tramo (19) de la cuerda de tracción cuyo otro extremo (18) pasa por la primera polea de cuerda (13) y está conectado a un brazo móvil propulsado por estas cuerdas, es decir, en este caso al segundo brazo móvil (3)
- El tercer tramo (21) de la cuerda de tracción conecta el segundo tambor (12) con el segundo brazo móvil propulsado (3), mientras que el cuarto tramo (23) de la cuerda de tracción conecta el segundo tambor del remolque con (12) con el brazo fijo (1) que procede al precedente brazo móvil (1)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/PL2006/000053.
Solicitante: MOVIEBIRD INTERNATIONAL SP. Z O.O.
Nacionalidad solicitante: Polonia.
Dirección: UL. TRAUGUTTA 5,46-667 OPOLE.
Inventor/es: ADAMIEC,PIOTR, ADAMIEC,MAREK, ADAMIEC,ROMAN.
Fecha de Publicación: .
Fecha Concesión Europea: 20 de Enero de 2010.
Clasificación Internacional de Patentes:
- B66F11/04D
Clasificación PCT:
- B66F11/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › B66F 11/00 Dispositivos de elevación adaptados especialmente a fines especiales, no previstos en otro lugar (dispositivos sobre los vehículos, que toman contacto con el suelo para soportar, elevar o maniobrar el vehículo B60S 9/00). › para plataformas o cabinas móviles, p. ej. sobre vehículos, que permiten a los obreros ocupar cualquier posición conveniente para ejecutar los trabajos requeridos (plataformas para limpiar las ventanas A47L 3/02; dispositivos para rescatar personas de los edificios de construcción A62B 1/02; bajo el aspecto vehículo en lo que se refiere a vehículos utilitarios B60P 3/14; pasarelas para el mantenimiento de puentes E01D 19/10; andamiajes sobre basamentos extensibles E04G 1/22; plataformas susceptibles de ser elevadas o bajadas, utilizables sobre escalas E06C 7/16).
Fragmento de la descripción:
Grúa telescópica de cámara.
El ámbito de técnica que concierne la patente
La presente invención se refiere a una grúa telescópica para un manejo más fácil de cámaras de televisión y cine.
El estado actual de la técnica en este ámbito
Las grúas de cámara es decir, los dispositivos para el control remoto de cámaras, se introdujeron y se los utiliza ya desde hace mucho tiempo para filmar películas y programas de televisión. La mayoría de las grúas que se utilizan actualmente para cámaras cinematográficas, son las grúas telescópicas que permiten grabar escenas que serían difíciles de realizar con las grúas convencionales. Los ejemplos de las grúas telescópicas se pueden encontrar tanto en la publicación internacional de patentes no. WO 89/10894, como en la descripción americana de la patente, que corresponden a la entrada de una reserva no. 1. Todas estas soluciones utilizan la pluma que consiste en un brazo fijo apoyado de forma rotativa en un soporte y los brazos móviles que se avanzan telescópicamente del brazo fijo. El brazo fijo está equipado con un equilibrador que sirve para mantener el equilibrio de la cámara fijada al final de un brazo móvil más avanzado. La ubicación del equilibrador depende del avanzamiento de los brazos móviles. En la mayoría de los casos los brazos de la grúa telescópica están movidos por la tracción lineal. Este tipo de tracción es relativamente barato, silencioso y no requiere complicadas actividades de mantenimiento. La Figura 1 ilustra el esquema cinético de una típica grúa telescópica con la tracción lineal. En el brazo fijo (1) se encuentran fijados tres brazos móviles (2, 3, 4). En la parte trasera del brazo móvil (1) se encuentran tres pares de tambores del remolque (5, 6, 7) rígidamente fijados sobre el eje (8) propulsados por un motor eléctrico (no se muestra en el esquema). Con los brazos móviles (2, 3, 4) están conectados las poleas de cuerda (10) a través de cuales pasan las cuerdas de tracción de acero (9) Tambores de remolque (5, 6, 7) mientras que se rodean con el eje (8) adaptan los particulares extremos de las cuerdas a devanado (9). A su vez las cuerdas (9) pasan por las poleas de cuerda (10). Sin embargo, esta solución, aunque en teoría sea muy simple, en la práctica requiere que todos los elementos estén hechos con mucha precisión. Se trata, en particular, de los tambores del remolque cuyos tamaño, en particular, el diámetro exterior debe ser muy estrictamente adaptado a las específicas dimensiones geométricas del ascensor. Por lo tanto, se puede encontrar un gran problema cuando resulta necesario extender el brazo de la grúa mediante la adición de otros brazos móviles porque, además de los mencionados problemas de la producción, cada brazo móvil agregado aumentará mucho las dimensiones trasversales del brazo fijo (1) que tendrá que acomodar los adicionales pares de tambores de remolque con diámetros más grandes. Además, esta solución requiere la aplicación de unos tramos muy largos de la cuerda, lo que resulta en una mayor flexibilidad longitudinal del sistema entero que complica el control preciso de la posición de la cámara. Exactamente por eso, todas las grúas construidas previamente estaban equipadas sólo con dos o tres brazos móviles.
La divulgación de la invención
El objetivo de esta invención es proporcionar un método barato y fácil de construir una grúa de cámaras telescópica que se puede extender fácilmente mediante la adición de un brazo móvil. Este objetivo corresponde a la grúa telescópica conforme con la invención que incluye un brazo fijo con un equilibrador móvil, fijados sobre el soporte, por lo menos dos brazos móviles que se avanzan telescópicamente del brazo fijo y el mecanismo de tracción lineal para mover los brazos móviles. La tracción lineal del primero y los siguientes brazos móviles forman: el primer y el segundo tambor del remolque, la primera y la segunda polea de cuerda y los cuatro tramos de la no extensible cuerda de tracción. Mencionados tambores de remolque del mecanismo de la tracción lineal específicamente el segundo brazo móvil propulsado, están vinculadas de manera rotativa al primer brazo móvil precedente con relación al segundo brazo móvil propulsado. La primera y la segunda polea de cuerda están fijadas al mencionado primer brazo fijo precedente, respectivamente, cerca de su interno y externo extremo. El primer tramo de la cuerda de tracción conecta el primer tambor de remolque con el brazo fijo que precede al primer brazo móvil precedente, mientras que el segundo tramo de la cuerda de tracción conecta el primer tambor de remolque con el segundo brazo móvil propulsado. Además, el tercer tramo de la cuerda de tracción conecta el segundo tambor de remolque con el segundo brazo móvil propulsado, mientras que el cuarto tramo de la cuerda de tracción conecta el segundo tambor de remolque con el brazo fijo que precede al primer brazo móvil precedente. En uno de los casos de la realización de la presente invención, el primer extremo del primer tramo de la cuerda de tracción está fijado al primer brazo fijo que precede al primer brazo móvil, mientras que el segundo extremo del primer tramo de la cuerda de tracción está fijado al primer tambor de remolque. Al primer tambor de remolque está fijado también el primer extremo del segundo tramo de la cuerda de tracción, su segundo extremo pasa por la primera polea de cuerda y está fijado al segundo brazo móvil propulsado. El primer extremo del tercer tramo de la cuerda de tracción está fijado al segundo brazo móvil propulsado, mientras que el segundo extremo del tercer tramo de la cuerda de tracción está fijado al segundo tambor de remolque. Al segundo tambor de remolque está fijado también el primer extremo del cuarto tramo de la cuerda de tracción, su segundo extremo pasa por la segunda polea de cuerda y está fijado el primer brazo móvil precedente. En otro caso de la realización de la presente invención, los tambores del remolque del mecanismo de la tracción lineal están montados de manera rotativa sobre un eje común al primer brazo móvil precedente. El mencionado eje de los tambores del remolque está perpendicular a la dirección del movimiento de los brazos móviles. En el siguiente caso de la realización de la presente invención, el primer y el segundo tramo de la cuerda de tracción del mecanismo de tracción lineal son los dos tramos de la misma cuerda. En un otro caso de la realización de la presente invención el tercero y el cuarto tramo de la cuerda de tracción del mismo mecanismo de tracción lineal son los dos tramos de la misma cuerda. En el siguiente caso de la realización de la presente invención, el primer brazo móvil está propulsado por una correa dentada que corre paralelo al eje longitudinal del brazo fijo y se extiende por las dos poleas fijadas al brazo fijo. La grúa según la presente invención combina las ventajas de las existentes tracciones lineales con un diseño mucho más sencillo y barato de los mecanismos traccionales. Esta solución permite reducir de casi el triple la longitud total de las cuerdas de tracción en comparación con la solución ya conocida, dando como resultado una reducción apreciable en el peso y la flexibilidad longitudinal de toda la estructura. Los distintos tramos de la cuerda son mucho más cortos y generalmente son comparables en la longitud, mientras que los diámetros de los tambores del remolque en todo el sistema de devanado no afectarán el funcionamiento de los mecanismos de los tracciones lineales. Esto ayuda a estandarizar y en consecuencia, reducir el número de los diferentes componentes del sistema de tracción. Debido a la construcción de los mecanismos de tracción, la grúa según la presente invención se puede extender fácilmente con los siguientes brazos móviles.
Una breve descripción de las figuras
La invención se muestra esquemáticamente en las Figuras, cuando:
La Figura 1 presenta el esquema cinético de una conocida grúa telescópica con tres brazos móviles
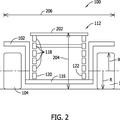
La Figura 2 presenta el esquema cinético de una grúa según la invención, que es el equivalente funcional de la grúa presentada en la Figura 1
Figuras 3 y 4 presentan el principio de funcionamiento de los brazos móviles de la grúa según la invención.
El modo de la actuación de la invención
La grúa ejemplar construida según la invención, tiene un brazo fijo (1) 4 m de longitud, que alberga tres telescópicamente fijados brazos móviles (2, 3, 4), con una longitud de 3,85 m cada uno. El brazo fijo (1) se puede montar en cualquier soporte, por ejemplo, en el eje horizontal que constituye una parte de un carro...
Reivindicaciones:
1. La grúa telescópica que consiste en el brazo fijo con el equilibrador móvil (29), montados sobre el soporte, por lo menos dos brazos móviles (2, 3, 4) que se avanzan telescópicamente del brazo fijo (1) y el mecanismo de tracción lineal para mover los brazos móviles (2, 3, 4) caracterizada por:
2. La grúa telescópica según la reivindicación no. 1 caracterizada por:
3. La grúa telescópica según la reivindicación no. 1 a 2 caracterizada por: los tambores del remolque (11, 12) del mismo mecanismo de tracción lineal están fijadas de manera rotativa en el mismo eje (15) fijadas al primer brazo móvil precedente (2), mientras que el mencionado eje (15) de los tambores del remolque (11, 12) está perpendicular a la dirección del movimiento de los brazos móviles.
4. La grúa telescópica según la reivindicación no. 1 a 3 caracterizada por: el primer (17) y el segundo (19) tramo de la cuerda de tracción del mismo mecanismo de tracción lineal son las dos partes de la misma cuerda.
5. La grúa telescópica según la reivindicación no. 1 a 3 caracterizada por: el tercer (21) y el cuarto (23) tramo de la cuerda de tracción del mismo mecanismo de tracción lineal son las dos partes de la misma cuerda.
6. La grúa telescópica según la reivindicación no. 1 a 5 caracterizada por: el primer brazo móvil (2) está movido por la correa dentada (26) que corre paralelo al eje longitudinal del brazo fijo (1) y se extiende por dos dichos dentados (27) fijados al brazo fijo.
Patentes similares o relacionadas:
 GRÚA DE CÁMARA TELESCÓPICA, del 29 de Abril de 2011, de ADAMIEC, PETER EDWARDS, KEITH: Grúa de cámara telescópica que comprende un soporte, una pluralidad de correas de accionamiento y la misma pluralidad de brazos , comprendiendo […]
GRÚA DE CÁMARA TELESCÓPICA, del 29 de Abril de 2011, de ADAMIEC, PETER EDWARDS, KEITH: Grúa de cámara telescópica que comprende un soporte, una pluralidad de correas de accionamiento y la misma pluralidad de brazos , comprendiendo […]
Plataforma de trabajo con protección contra funcionamiento involuntario sostenido, del 27 de Mayo de 2020, de JLG INDUSTRIES,INC.: Una plataforma de trabajo combinada y un sistema para detectar obstáculos próximos, la plataforma de trabajo incluye un panel de […]
Una plataforma aérea autopropulsada, del 13 de Mayo de 2020, de Magni Telescopic Handlers S.r.l: Una plataforma aérea autopropulsada que incluye una plataforma de trabajo proporcionada en el extremo de un brazo operativo que está soportado […]
Dispositivo de protección contra caídas, del 6 de Mayo de 2020, de IVECO MAGIRUS AG: Dispositivo de protección contra caídas , que comprende un módulo con un adaptador para unir de manera extraíble el módulo en el extremo de un aparato […]
Sistema que comprende una plataforma de trabajo giratoria, del 1 de Abril de 2020, de Scanclimber Oy: Sistema que comprende: una estructura de mástil sustancialmente vertical; una estructura de armazón que está conectada a la estructura […]
 Método y sistema para un dispositivo de elevación de baja altura, del 25 de Marzo de 2020, de Xtreme Manufacturing, LLC: Un vehículo elevador de tijera que comprende:
un carro que comprende una pluralidad de ruedas dirigibles de manera independiente configuradas para acoplarse […]
Método y sistema para un dispositivo de elevación de baja altura, del 25 de Marzo de 2020, de Xtreme Manufacturing, LLC: Un vehículo elevador de tijera que comprende:
un carro que comprende una pluralidad de ruedas dirigibles de manera independiente configuradas para acoplarse […]
Un equipo de carga para máquinas de trabajo, del 18 de Marzo de 2020, de Manitou Italia S.r.l: Un equipo de carga destinado a ser utilizado con máquinas de trabajo como manipuladores telescópicos, plataformas de trabajo aéreo o similares, […]
Sistema de detección de obstáculos para una plataforma de trabajo aérea, del 19 de Febrero de 2020, de JLG INDUSTRIES,INC.: Un conjunto de plataforma que comprende: una plataforma de trabajo que incluye un piso de la plataforma y un riel de seguridad que se extiende […]