ESTRATIFICACION DE BOBINAS CON MOVIMIENTO DE AGUJA MEJORADO.
Aparato para devanar bobinas de alambre (C) sobre un componente de máquina dinamoeléctrica (10) que comprende:
un primer mecanismo de accionamiento configurado para generar un movimiento alternativo (T1, T2) entre un brazo de aguja (15) y un núcleo central hueco del componente de la máquina (10), realizando el brazo de aguja (15) el movimiento alternativo a través del núcleo hueco; un segundo mecanismo de accionamiento (21, 23) configurado para trasladar el brazo de aguja sustancialmente perpendicular al movimiento alternativo relativo para estratificar las bobinas de alambre (C) que se están devanando sobre el componente; y una estructura de guiado configurada para guiar el brazo de aguja durante el movimiento de traslación y desplazarlo sustancialmente en perpendicular al movimiento alternativo relativo, estando caracterizado el aparato porque la estructura de guiado (15c, 15e) lleva a cabo el movimiento alternativo relativo (T1, T2) junto con el brazo de aguja (15) y se mantiene fuera del núcleo hueco durante el devanado de las bobinas de alambre (C)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E03013603.
Solicitante: AXIS S.P.A..
Nacionalidad solicitante: Italia.
Dirección: 50028 TAVARNELLE VAL DI PESA (.
Inventor/es: STRATICO, GIANFRANCO, LUMINI, ANTONIO, STRATICO',SIMONE.
Fecha de Publicación: .
Fecha Solicitud PCT: 16 de Junio de 2003.
Fecha Concesión Europea: 21 de Abril de 2010.
Clasificación Internacional de Patentes:
- H02K15/095 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02K MAQUINAS DINAMOELECTRICAS (relés dinamoeléctricos H01H 53/00; transformación de una potencia de entrada en DC o AC en una potencia de salida de choque H02M 9/00). › H02K 15/00 Métodos o aparatos especialmente adaptados para la fabricación, montaje, mantenimiento o reparación de máquinas dinamoeléctricas. › por asiento de los conductores alrededor de los polos salientes.
Clasificación PCT:
- H02K15/095 H02K 15/00 […] › por asiento de los conductores alrededor de los polos salientes.
Clasificación antigua:
- H02K15/095 H02K 15/00 […] › por asiento de los conductores alrededor de los polos salientes.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Estratificación de bobinas con movimiento de aguja mejorado.
Antecedentes de la invención
La presente solicitud se refiere a soluciones perfeccionadas para devanar alambre formando bobinas sobre componentes de máquinas dinamoeléctricas, tales como estátores y rotores. Más particularmente, las soluciones de la presente solicitud ofrecen un equipo de agujas perfeccionado para el devanado de bobinas de alambre alrededor de los polos del núcleo de un estátor, en el que es necesaria una estratificación precisa de las espiras de alambre de las bobinas.
Para obtener una estratificación precisa de las espiras de alambre, normalmente es necesario colocar las espiras de alambre en posiciones predeterminadas a lo largo de los lados, que se extienden radialmente de los polos. Las soluciones de la presente invención permiten el devanado de bobinas a altas velocidades sin provocar la vibración de las agujas distribuidoras de alambre que causan una disposición de las espiras no deseada y una variación de la tensión del alambre dentro de las bobinas.
En los documentos EP 1191672, EP 1076401 y EP 1221756, se describen soluciones para desplazar las agujas en la dirección de estratificación. En estas soluciones, es necesario que el equipo de guiado de las agujas en la dirección de la estratificación pase a través del interior del núcleo del estátor durante el movimiento de traslación que efectúa la aguja para devanar. Por consiguiente, el tamaño de la parte interna del estátor debe ser suficientemente grande como para permitir el paso de este equipo. Con las soluciones de la presente invención, las agujas distribuidoras de alambre pueden desplazarse con respecto al núcleo del estátor en espacios sumamente estrechos (por ejemplo, los espacios existentes entre los polos del núcleo del estátor), a alta velocidad y con un riesgo menor de que las agujas distribuidoras de alambre choquen con las partes circundantes. Mediante las soluciones de la presente invención, estos objetivos se pueden alcanzar en núcleos de estátor que presentan partes internas huecas muy pequeñas que no permitirían el paso de un equipo de agujas convencional durante el movimiento de devanado relativo con respecto al núcleo del estátor.
Estos y otros objetivos de la presente invención se pondrán más claramente de manifiesto a partir de los dibujos y de la descripción detallada siguientes.
Breve descripción de los dibujos
A continuación, se describen unas formas de realización no limitativas de la presente invención haciendo referencia a los dibujos adjuntos, en los cuales:
la figura 1 es una vista en sección parcial de una forma de realización de la presente invención, observada en la dirección 1-1 de la figura 2;
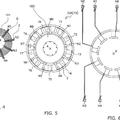
la figura 2 es una vista terminal axial de una forma de realización de la presente invención, observada en la dirección 2-2 de la figura 1, en la que se omiten algunas partes representadas en la figura 1 para mayor claridad;
la figura 3 es una vista de la estructura de guiado de una forma de realización de la presente invención, observada en la dirección 3-3 de la figura 1; y
la figura 4 es una vista en perspectiva parcial de una forma de realización de la presente invención, observada en la dirección 4 de la figura 2.
Descripción detallada de la invención
Las soluciones de la presente solicitud se refieren a las descritas en la patente US nº 6.533.208 de Becherucci et al. y la solicitud de patente US nº 09/960.550 de Stratico et al., presentada el 20 de septiembre de 2001.
El núcleo del estátor 10 de la figura 1 se representa en sección y dispuesto para el devanado con el alambre W para formar las bobinas C alrededor de los polos 10a. La aguja 11 es un elemento cilíndrico hueco que permite el paso del alambre W, que de ese modo el alambre W es suministrado por el extremo 11a de la aguja 11. Es necesario dotar a la aguja 11 de los movimientos relativos T1, T2, R1, R2, S1 y S2 con respecto al núcleo del estátor 10 para devanar el alambre W y formar las bobinas C. Los movimientos relativos T1 y T2 son traslaciones hacia delante y hacia atrás que determinan que la aguja 11 atraviese la parte interna hueca del núcleo del estátor 10. Las rotaciones R1 y R2 son movimientos giratorios con respecto al eje central 10b del núcleo del estátor, y se realizan cuando la aguja ha sobrepasado los extremos terminales 10c y 10d del núcleo del estátor.
Como es bien conocido por los expertos en la materia, una combinación de movimientos en un orden progresivo (por ejemplo, primero T1, seguido de R1, T2 y R2) hace que la aguja devane el alambre W alrededor de un polo para una vuelta de la bobina. Normalmente se realizan los movimientos de traslación S1 o S2, que suelen ser perpendiculares a las traslaciones T1 y T2, para obtener la estratificación de las espiras. La duración y la frecuencia de los movimientos S1 o S2 habitualmente se pueden programar y dependen de la disposición deseada de las espiras alrededor del polo.
En la figura 2, se representa cómo es capaz la presente invención de realizar el devanado simultáneo de una pluralidad de polos utilizando agujas adicionales, tales como las agujas 12, 13 y 14. Cada una de las agujas 11, 12, 13 y 14 normalmente presenta los movimientos descritos para la aguja 11. Cada aguja puede devanar una respectiva bobina C alrededor de un respectivo polo 10a del núcleo del estátor, suministrando el alambre W de la manera descrita para la aguja 11. Debe observarse que, en la figura 2, las agujas 11, 12 y 13 aparecen en las posiciones más radialmente proximales y la aguja 14 en su posición más radialmente distal. Esta ilustración compuesta tiene como propósito mostrar el intervalo del movimiento de las agujas 11, 12, 13 y 14.
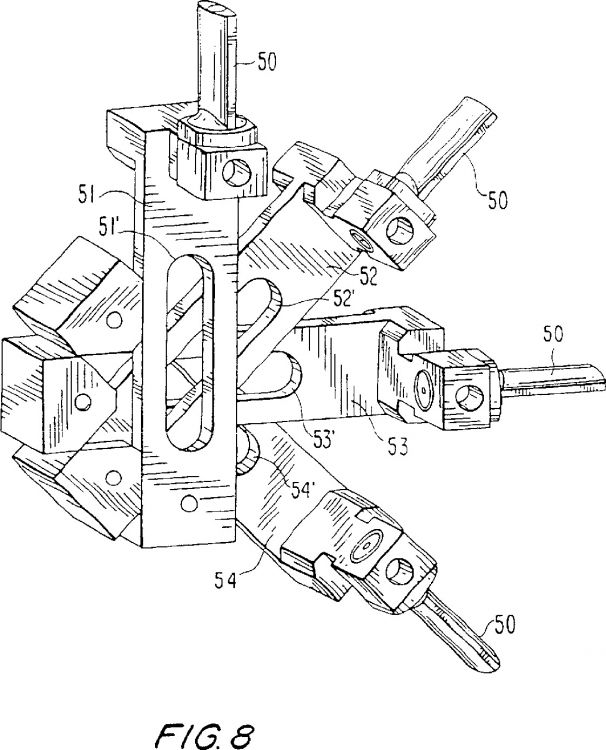
Tal como se representa en la figura 1, la aguja 11 puede fijarse perpendicularmente al brazo de aguja 15, colocando el extremo radialmente proximal de la aguja 11 en el orificio 15a del brazo de aguja 15. El tornillo sin cabeza 11b puede utilizarse para afianzar el extremo radialmente proximal de la aguja 11 en el orificio 15a. El brazo de aguja 15 normalmente se dispone paralelamente al eje longitudinal 10b del núcleo del estátor, tal como se representa en la figura 1. La parte extrema 15b del brazo de aguja puede estar separada de la aguja 11 por una distancia L, suficiente para permitir que la aguja 11 esté fuera del núcleo del estátor en un extremo del núcleo del estátor (por ejemplo, el extremo 10d de la figura 1), mientras que la parte extrema 15b está fuera del núcleo del estátor en el extremo opuesto (por ejemplo, el extremo 10c de la figura 1). Esta situación se representa en la figura 1 y normalmente corresponde al final de un movimiento de traslación, tal como el T2, justo antes de una rotación, tal como la R2. La parte extrema 15b comprende una parte de guiado 15c. La parte de guiado 15c guía el brazo de aguja 15 durante los movimientos de estratificación, tales como S1 y S2, de la forma descrita en mayor profundidad a continuación.
El elemento externo 16 puede estar provisto de los movimientos de rotación relativa R1 y R2 con respecto al núcleo del estátor 10. El elemento de soporte de la guía 17 se sujeta al extremo del elemento externo 16 por medio de unos pernos 18. El elemento de soporte de la guía 17 puede presentar unas partes erguidas 17a para alojar la parte de guiado 15c del brazo de aguja 15. El elemento de cubierta 19 puede sujetarse al elemento de soporte de la guía 17 por medio de unos pernos 20. El elemento de cubierta 19 puede presentar unas partes erguidas 19a configuradas para situarse adyacentes a las partes erguidas 17a y delante de estas. Cuando el elemento de cubierta 19 se sujeta al elemento de soporte de la guía 17, las partes 17a y 19a pueden formar un carril de guiado 15e, donde se aloja la parte de guiado 15c. El carril de guiado 15e puede configurarse perpendicular al eje longitudinal 10b para guiar los movimientos de estratificación S1 y S2. Las partes erguidas 19a pueden estar provistas de unas aberturas 19b para permitir el paso del brazo de aguja 15 a través del elemento de cubierta 19 durante los movimientos de estratificación.
El elemento de disco 21 puede montarse coaxialmente dentro del elemento externo 16 y puede estar dotado de los movimientos de rotación relativa R3 o R4 con respecto al elemento externo 16. Pueden estar previstos unos cojinetes 22 entre el elemento de disco 21 y el elemento externo 16 para permitir los movimientos de rotación relativa R3 o R4 alrededor del eje 10b. El extremo frontal del elemento de disco 21 puede estar provisto de...
Reivindicaciones:
1. Aparato para devanar bobinas de alambre (C) sobre un componente de máquina dinamoeléctrica (10) que comprende: un primer mecanismo de accionamiento configurado para generar un movimiento alternativo (T1, T2) entre un brazo de aguja (15) y un núcleo central hueco del componente de la máquina (10), realizando el brazo de aguja (15) el movimiento alternativo a través del núcleo hueco; un segundo mecanismo de accionamiento (21, 23) configurado para trasladar el brazo de aguja sustancialmente perpendicular al movimiento alternativo relativo para estratificar las bobinas de alambre (C) que se están devanando sobre el componente; y una estructura de guiado configurada para guiar el brazo de aguja durante el movimiento de traslación y desplazarlo sustancialmente en perpendicular al movimiento alternativo relativo, estando caracterizado el aparato porque la estructura de guiado (15c, 15e) lleva a cabo el movimiento alternativo relativo (T1, T2) junto con el brazo de aguja (15) y se mantiene fuera del núcleo hueco durante el devanado de las bobinas de alambre (C).
2. Aparato según la reivindicación 1, en el que la estructura de guiado (15c, 15e) comprende una ranura que se extiende radialmente (15e), que recibe una parte (15c) del brazo de aguja (15).
3. Aparato según la reivindicación 1, en el que el segundo mecanismo de accionamiento comprende un elemento de accionamiento (21) que se comunica mediante acoplamiento con el brazo de aguja (15), y en el que el movimiento de traslación (S1, S2) se acciona a través de la rotación relativa entre el elemento de accionamiento (21) y el brazo de aguja (15).
4. Aparato según la reivindicación 3, en el que el elemento de accionamiento es un disco (21) que presenta un carril en espiral que se comunica mediante acoplamiento con el brazo de aguja (15) para causar el movimiento de traslación (S1, S2).
5. Aparato según la reivindicación 1, en el que la estructura de guiado (15c, 15e) está sustancialmente dispuesta entre el brazo de aguja (15) y el segundo mecanismo de accionamiento (21, 23).
6. Aparato según la reivindicación 1, que comprende además una estructura de soporte (24, 25) por lo menos parcialmente situada circunferencialmente alrededor del brazo de aguja (15) y configurada para estabilizar los movimientos del brazo de aguja (15).
7. Aparato según la reivindicación 6, en el que la estructura de soporte (24, 25) está configurada además para introducirse en el núcleo hueco junto con el brazo de aguja (15) durante el devanado de las bobinas de alambre (C).
8. Aparato según la reivindicación 6, en el que la estructura de soporte (24, 25) comprende un tubo hueco (24d) que se extiende a través del segundo mecanismo de accionamiento y la estructura de guiado (15c, 15e) para suministrar alambre a una aguja (11) situada en la proximidad de un extremo distal del brazo de aguja (15).
9. Aparato según la reivindicación 8, en el que la estructura de soporte (24, 25) comprende además una abertura adyacente a un extremo distal de la estructura de soporte para facilitar el libre acceso al alambre que está suministrado a través del tubo hueco (24d).
10. Aparato según la reivindicación 1, en el que diversos brazos de aguja (15) se acoplan a los mecanismos de accionamiento y se utilizan para devanar simultáneamente varios polos del componente de la máquina (10).
11. Aparato según la reivindicación 10, en el que cada brazo de aguja (15) es recibido en una respectiva ranura que se extiende radialmente (19b) de la estructura de guiado (15c, 15e).
12. Procedimiento para devanar bobinas de alambre (C) sobre un componente de máquina dinamoeléctrica (10) que comprende: producir un movimiento alternativo relativo entre un brazo de aguja (15) y un núcleo central hueco del componente de la máquina, realizando el brazo de aguja (15) el movimiento alternativo a través del núcleo hueco; trasladar el brazo de aguja (15) sustancialmente perpendicular al movimiento alternativo relativo (T1, T2) para estratificar las bobinas de alambre que se están devanando sobre el componente; y guiar el brazo de aguja (15) durante el movimiento de traslación con la estructura de guiado (15c, 15e) para desplazar el brazo de aguja en sentido sustancialmente perpendicular al movimiento alternativo relativo, caracterizado porque la estructura de guiado (15c, 15e) lleva a cabo el movimiento alternativo relativo junto con el brazo de aguja y permanece fuera del núcleo hueco durante el devanado de las bobinas de alambre (C).
13. Procedimiento según la reivindicación 12, en el que el guiado del brazo de aguja (15) durante el movimiento de traslación (S1, S2) comprende recibir una parte (15c) del brazo de aguja dentro de una ranura que se extiende radialmente (15e).
14. Procedimiento según la reivindicación 12, en el que la traslación del brazo de aguja comprende producir una rotación relativa entre el brazo de aguja (15) y un elemento de accionamiento (21) que se comunica mediante acoplamiento con el brazo de aguja (15).
15. Procedimiento según la reivindicación 12, que comprende además la estabilización de los movimientos del brazo de aguja con una estructura de soporte (24, 25) por lo menos parcialmente situada circunferencialmente alrededor del brazo de aguja (15), en el que la estructura de soporte (24, 25) está configurada para introducirse en el núcleo hueco junto con el brazo de aguja durante el devanado de las bobinas de alambre (C).
16. Procedimiento según la reivindicación 15, que comprende además el suministro de alambre (W) a una aguja (11) dispuesta en la proximidad de un extremo distal del brazo de aguja (15), a través de un tubo hueco (24d) que se extiende a través de la estructura de guiado (15c, 15e) y de la estructura de soporte (24, 25).
17. Procedimiento según la reivindicación 16, que comprende además proporcionar libre acceso al alambre que se está suministrando a través del tubo hueco (24d) por una abertura adyacente a un extremo distal de la estructura de soporte (24, 25).
Patentes similares o relacionadas:
 Estator, motor en el que se utiliza el estator, y método para fabricar el estator, del 29 de Julio de 2020, de DAIKIN INDUSTRIES, LTD.: Un estator para un motor de bobinado concentrado simultáneo, que comprende:
un núcleo , que tiene 3 × m dientes (T1 a T9) que al menos incluyen un primer diente (T1), […]
Estator, motor en el que se utiliza el estator, y método para fabricar el estator, del 29 de Julio de 2020, de DAIKIN INDUSTRIES, LTD.: Un estator para un motor de bobinado concentrado simultáneo, que comprende:
un núcleo , que tiene 3 × m dientes (T1 a T9) que al menos incluyen un primer diente (T1), […]
Aparato para el enrollado y terminación de partes centrales de maquinas dinamo-electricas, del 20 de Noviembre de 2019, de ATOP S.P.A.: Aparatos para el devanado y la terminación de bobinas devanadas con al menos un cable eléctrico (W) en un núcleo de una máquina eléctrica de […]
Estator y motor, del 8 de Mayo de 2019, de DAIKIN INDUSTRIES, LTD.: Un estator que comprende: un núcleo de estator cilíndrico ; y un aislamiento instalado en una superficie extrema en dirección axial del […]
Inducido, máquina dinamo eléctrica, ventilador tangencial, y método para fabricar un par de dientes del inducido, del 7 de Mayo de 2019, de DAIKIN INDUSTRIES, LTD.: Un inducido que conforma una máquina eléctrica giratoria que incluye un elemento de campo con (12±2)n polos, siendo n un número entero positivo, […]
Aparato y método para soportes de enrollado para bobinas y polos simples núcleos para máquinas de dinamoeléctricas, del 25 de Abril de 2018, de ATOP S.P.A.: Aparato para devanar bobinas de al menos un conductor de cable eléctrico W, sobre un soporte de bobina (10, 11, 10', 11'), que comprende […]
Aparatos y métodos para soportes de enrollado para bobinas y polos simples de núcleos de máquinas dinamoeléctricas, del 13 de Diciembre de 2017, de ATOP S.P.A.: Aparato para el devanado de bobinas C, de al menos un alambre eléctrico W, sobre un soporte de bobina , en el que el soporte de bobina está devanado […]
Devanado de bobinas y terminación de alambre de bobina de núcleos de máquinas dinamoeléctricas, del 6 de Diciembre de 2017, de ATOP S.P.A.: Un método para devanado y terminación de bobinas de al menos un alambre eléctrico (W) en un núcleo de una máquina dinamoeléctrica que tiene un eje longitudinal (20'); […]
Devanado de bobinas de máquinas dinamo-eléctricas, del 4 de Enero de 2017, de ATOP S.P.A.: Un aparato para el devanado de bobinas (B) de hilo conductor (W) alrededor de los polos respectivos (10c) de un núcleo de una componente de máquina dinamo-eléctrica; las […]