Transmisión continuamente variable.
Un accionamiento de accesorios continuamente variable, CVAD, (10) que comprende:
una pluralidad de satélites de tracción (3048 - figura 37) dispuestos angularmente en torno a un eje longitudinal del CVAD, donde los satélites de tracción están configurados para transferir una potencia a un dispositivo accesorio;
una pluralidad de ejes de satélites (3050 - figura 37), donde cada eje de satélite está operablemente acoplado a cada satélite de tracción, cada eje de satélite define un eje inclinable de rotación para cada satélite de tracción, cada eje de satélite está configurado para un desplazamiento angular en un plano perpendicular al eje longitudinal y cada eje de satélite está configurado para un desplazamiento angular en un plano paralelo al eje longitudinal;
un primer miembro portador (3036 - figura 34) dispuesto coaxialmente en torno al eje longitudinal, donde el primer miembro portador está operablemente acoplado a cada satélite de tracción, teniendo el primer miembro portador una pluralidad de ranuras decaladas radialmente (1050 - figuras 19-21) dispuestas angularmente en torno a un centro del primer miembro portador, teniendo cada una de las ranuras decaladas radialmente un decalaje lineal desde una línea central del miembro portador;
un segundo miembro portador (3038 - figura 34) dispuesto coaxialmente en torno al eje longitudinal, teniendo el segundo miembro portador una pluralidad de ranuras radiales (1052 - figura 19), estando dispuestas angularmente las ranuras radiales en torno a un centro del segundo miembro portador, estando cada una de las ranuras radiales sustancialmente alineada de manera radial con el centro del segundo miembro portador;
un actuador de oblicuidad (3005 - figura 30) que comprende un inductor de oblicuidad (3007 - figuras 30-33) acoplado al primer y segundo miembro portador (3036, 3038), estando configurado el actuador para impartir una rotación relativa entre el primer y segundo miembro portador, donde el inductor de oblicuidad (3007) está configurado para hacer que gire el primer miembro portador (3036) en una primera dirección de rotación en torno a la dirección longitudinal, y para hacer que gire el segundo miembro portador (3038) en una segunda dirección de rotación en torno al eje longitudinal, donde la primera dirección de rotación es sustancialmente opuesta a la segunda dirección de rotación.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E13163601.
Solicitante: Fallbrook Intellectual Property Company LLC .
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 2620 Brushy Creek Loop Cedar Park, TX 78613 ESTADOS UNIDOS DE AMERICA.
Inventor/es: THOMASSY,FERNAND A, LOHR,CHARLES B, POHL,BRAD P, MCBROOM,SCOTT T.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16H15/28 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 15/00 Transmisiones para transmitir un movimiento rotativo con relación de velocidad variable o para invertir un movimiento rotativo por fricción entre órganos rotativos (control para cambio de velocidad o para inversión de transmisiones que transmiten un movimiento rotativo F16H 59/00 - F16H 63/00). › con una superficie de fricción en el exterior.
PDF original: ES-2545662_T3.pdf
Fragmento de la descripción:
Transmisión continuamente variable.
Los signos de referencia (incluyendo los números de las figuras) tal como se utilizan en las reivindicaciones no se deberían tomar como limitantes del alcance del contenido protegido por las reivindicaciones; su única función es hacer las reivindicaciones más fáciles de entender. La EPC prohíbe explícitamente que se interpreten los signos de referencia como limitantes de las reivindicaciones.
ANTECEDENTES DE LA INVENCIÓN
Campo de la invención
El campo de la invención se refiere en general a dispositivos y métodos de modulación de potencia mecánica y/o electromecánica y, más particularmente, a dispositivos y métodos de modulación de potencia planetaria continua y/o infinitivamente variable para modular el flujo de potencia en un tren de potencia o accionamiento, tal como el flujo de potencia desde una máquina motriz primaria a uno o más dispositivos auxiliares o accionados.
Descripción de la técnica relacionada
En ciertos sistemas una fuente de potencia única acciona dispositivos múltiples. La fuente de potencia tiene típicamente un estrecho rango de velocidad de funcionamiento en el que son óptimas las prestaciones de la fuente de potencia. Se prefiere hacer que la fuente de potencia funcione dentro de su rango de velocidad de funcionamiento que optimiza las prestaciones. Un dispositivo accionado tiene también típicamente un estrecho rango de velocidad de funcionamiento en el que son óptimas las prestaciones del dispositivo accionado. Se prefiere también hacer que el dispositivo accionado funcione dentro de su rango de velocidad de funcionamiento que optimiza las prestaciones. Se emplea usualmente un acoplamiento para transferir potencia de la fuente de potencia al dispositivo accionado. Cuando un acoplamiento directo no modulador acopla la fuerza de potencia al dispositivo accionado, este dispositivo accionado funciona a una velocidad proporcional a la de la fuente de potencia. Sin embargo, ocurre frecuentemente que la velocidad óptima de funcionamiento del dispositivo accionado no es directamente proporcional a la velocidad óptima de funcionamiento de la fuente de potencia. Por tanto, se prefiere incorporar en el sistema un acoplamiento adaptado para modular entre la velocidad de la fuente de potencia y la velocidad del dispositivo accionado.
Los acoplamientos entre la fuente de potencia y los dispositivos accionados pueden seleccionarse de tal manera que la velocidad de entrada desde la fuente de potencia se reduzca o se aumente en la salida de un acoplamiento dado. Sin embargo, en sistemas frecuentemente ¡mplementados las configuraciones de tren de potencia y/o las disposiciones de acoplamiento típicas conocidas permiten en el mejor de los casos una relación constante entre la velocidad de entrada desde la fuente de potencia y la velocidad de transferencia de potencia al dispositivo accionado. Un sistema de esta clase es el llamado sistema de accionamiento de accesorios del extremo frontal (FEAD) empleado en muchas aplicaciones de automóviles. En un sistema FEAD típico la máquina motriz primaria (usualmente un motor de combustión Interna) proporciona la potencia para que funcionen uno o más accesorios, tales como un ventilador de refrigeración, una bomba de agua, una bomba de aceite, una bomba de servodirección, un alternador, etc. Durante el funcionamiento del automóvil los accesorios son forzados a funcionar a velocidades que tienen una relación fija con la velocidad de la máquina motriz primaria. Por tanto, por ejemplo, a medida que aumenta la velocidad del motor de combustión desde 800 revoluciones por minuto (rpm) al ralentí hasta 2500 rpm a velocidad de crucero, la velocidad de cada accesorio accionado por el motor de combustión aumenta proporcionalmente al aumento en la velocidad de dicho motor, de tal manera que algunos accesorios pueden estar funcionando a velocidades variables que oscilan entre 1600 rpm y 8000 rpm. El resultado de esta configuración del sistema es que a menudo algún accesorio dado no funciona dentro de su rango de velocidad de eficiencia máxima. En consecuencia, se producen ineficiencias derivadas de la energía gastada durante el funcionamiento y del sobredimensionamiento de los accesorios para manejar los rangos de velocidad y/o de par.
Así, existe una necesidad continuada de dispositivos y métodos para modular la transferencia de potencia entre una máquina motriz primaria y dispositivos accionados. En algunos sistemas sería beneficioso regular la transferencia de velocidad y/o de par desde un motor eléctrico y/o un motor de combustión interna a uno o más dispositivos accionados que operan a velocidades variables de optimización de la eficiencia. En algunas aplicaciones corrientes en automóviles existe una necesidad de un dispositivo modulador de potencia para gobernar el accionamiento de los accesorios del extremo frontal dentro de los límites de embalaje existentes.
El documento WO2010/024809 describe una transmisión continuamente variable (CVT) que tiene una pluralidad de satélites de tracción, donde cada satélite de tracción tiene un eje de rotación inclinable, comprendiendo la CVT: una primera placa del estator dispuesta coaxialmente en torno a un eje de accionamiento principal de la CVT, donde la primera placa del estator está operablemente acoplada a cada satélite de tracción, teniendo la primera placa del estator una pluralidad de ranuras decaladas radlalmente dispuestas en ángulo en torno a un centro de la primera placa del estator, teniendo cada una de las ranuras decaladas radialmente un decalaje lineal desde una línea central
de la primera placa del estator; una segunda placa del estator dispuesta coaxialmente en torno a un eje de accionamiento principal de la CVT, teniendo la segunda placa del estator una pluralidad de ranuras radiales, donde las ranuras radiales están dispuestas angularmente en torno a un centro de la segunda placa del estator y cada una de las ranuras radiales sustancialmente alineada de manera radial con el centro de la segunda placa del estator; y un actuador operablemente acoplado con al menos una de la primera y segunda placa del estator, donde el actuador está configurado para Impartir una rotación relativa entre la primera y segunda placa del estator. Este documento también describe un método para ajustar una relación de velocidad de una transmisión continuamente variable (CVT) que tiene una pluralidad de satélites de tracción, donde cada satélite de tracción está configurado para tener un eje de rotación ¡ncllnable, comprendiendo el método los pasos de: determinar un punto de ajuste para una relación de velocidades de la CVT; medir una relación de velocidades real de la CVT; comparar la relación de velocidades real con el punto de ajuste para la relación de velocidades con el fin de generar, de ese modo, un valor de comparación; y girar una placa del estator un desplazamiento angular en función de, al menos en parte, el valor de comparación, en el que al girar la placa del estator aplica una condición de oblicuidad a cada uno de los satélites de tracción, y donde la condición de oblicuidad cambia al tiempo que cada eje inclinable de rotación se inclina y el desplazamiento angular permanece constante.
SUMARIO DE LA INVENCIÓN
Tales necesidades son abordadas por la invención según la reivindicación 1 y la reivindicación 8.
Las reivindicaciones subordinadas conciernen a realizaciones particulares de las reivindicaciones independientes.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
Las figuras 1-29, 34-41 y 43-52 no muestran un CVAD que cae bajo la redacción de las reivindicaciones 1 y 8.
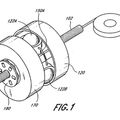
La figura 1 es una vista en perspectiva de una realización de la inventiva de un accionamiento de accesorios continuamente variable (CVAD) que tiene un sistema de control de oblicuidad.
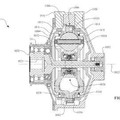
La figura 2 es una vista en perspectiva y en corte transversal de una transmisión continuamente variable (CVT) que puede utilizarse con el CVAD de la figura 1.
La figura 3 es una vista despiezada en perspectiva de la CVT de la figura 2.
La figura 4 es una vista en corte transversal de la CVT de la figura 2.
La figura 5 es una vista en perspectiva y en corte transversal parcial de un subconjunto de variador que puede utilizarse en la CVT de la figura 2.
La figura 6 es una vista en corte transversal de ciertos componentes de la CVT de la figura 2.
La figura 7 es una vista de detalle A en corte transversal de ciertos componentes del subconjunto de variador de la
figura 5.
La figura 8 es una vista en perspectiva de un anillo de retención de portador que puede utilizarse con el subconjunto de variador de la figura 5.
La figura 9 es una vista en perspectiva de una realización... [Seguir leyendo]
Reivindicaciones:
1. Un accionamiento de accesorios continuamente variable, CVAD, (10) que comprende:
una pluralidad de satélites de tracción (3048 - figura 37) dispuestos angularmente en torno a un eje longitudinal del CVAD, donde los satélites de tracción están configurados para transferir una potencia a un dispositivo accesorio;
una pluralidad de ejes de satélites (3050 - figura 37), donde cada eje de satélite está operablemente acoplado a cada satélite de tracción, cada eje de satélite define un eje inclinable de rotación para cada satélite de tracción, cada eje de satélite está configurado para un desplazamiento angular en un plano perpendicular al eje longitudinal y cada eje de satélite está configurado para un desplazamiento angular en un plano paralelo al eje longitudinal;
un primer miembro portador (3036 -figura 34) dispuesto coaxialmente en torno al eje longitudinal, donde el primer miembro portador está operablemente acoplado a cada satélite de tracción, teniendo el primer miembro portador una pluralidad de ranuras decaladas radlalmente (1050 - figuras 19-21) dispuestas angularmente en torno a un centro del primer miembro portador, teniendo cada una de las ranuras decaladas radialmente un decalaje lineal desde una línea central del miembro portador;
un segundo miembro portador (3038 - figura 34) dispuesto coaxialmente en torno al eje longitudinal, teniendo el segundo miembro portador una pluralidad de ranuras radiales (1052 - figura 19), estando dispuestas angularmente las ranuras radiales en torno a un centro del segundo miembro portador, estando cada una de las ranuras radiales sustanclalmente alineada de manera radial con el centro del segundo miembro portador;
un actuador de oblicuidad (3005 - figura 30) que comprende un inductor de oblicuidad (3007 - figuras 30-33) acoplado al primer y segundo miembro portador (3036, 3038), estando configurado el actuador para Impartir una rotación relativa entre el primer y segundo miembro portador, donde el inductor de oblicuidad (3007) está configurado para hacer que gire el primer miembro portador (3036) en una primera dirección de rotación en torno a la dirección longitudinal, y para hacer que gire el segundo miembro portador (3038) en una segunda dirección de rotación en torno al eje longitudinal, donde la primera dirección de rotación es sustancialmente opuesta a la segunda dirección de rotación.
2. El CVAD de la reivindicación 1, que comprende además una rueda solar de tracción (1026) situada radialmente hacia dentro de cada uno de los satélites de tracción y en contacto con estos, estando la rueda solar de tracción sustanclalmente fija en dirección axial con respecto al eje longitudinal.
3. El CVAD de la reivindicación 2, en el que la rueda solar de tracción tiene una periferia exterior provista con una primera y segunda superficie de contacto, estando configuradas la primera y segunda superficie de contacto para contactar cada uno de los satélites de tracción.
4. El CVAD déla reivindicación 1, en el que el inductor de oblicuidad comprende un engranaje acoplado al primer y segundo miembro portador.
5. El CVAD de la reivindicación 4, que comprende además un árbol acoplado al engranaje, el árbol se extiende radialmente hacia fuera desde el engranaje tomando como referencia el eje longitudinal.
6. El CVAD de la reivindicación 5, en el que el árbol se extiende axialmente desde el engranaje tomando como referencia el eje longitudinal.
7. El CVAD de la reivindicación 1, en el que el inductor de oblicuidad comprende una parte roscada en contacto con el primer miembro portador.
8. Un método para ajustar una relación de velocidades de un accionamiento de accesorios continuamente variable, CVAD, (10) que tiene una pluralidad de satélites de tracción (1024), teniendo cada satélite de tracción un eje de rotación inclinable, teniendo el CVAD un primer miembro portador (1028) operablemente acoplado a cada uno de los satélites de tracción y un segundo miembro portador (1030) acoplado a cada uno de los satélites de tracción, comprendiendo el método los pasos de:
determinar un punto de ajuste para un desplazamiento angular del primer y segundo miembro portador, donde el punto de ajuste para el desplazamiento angular del primer y segundo miembro portador está basado, al menos en parte, en un punto de ajuste para la relación de velocidades;
hacer que gire el primer y segundo miembro portador hasta el punto de ajuste para el desplazamiento angular del primer y segundo miembro portador, en el que al hacer que gire el primer y segundo miembro portador se induce una condición de oblicuidad sobre cada eje de rotación inclinable, estando configurados el primer y segundo miembro portador para que se ajusten a la condición de oblicuidad al tiempo que cada eje de rotación inclinable se inclina; y
en el que hacer que gire el miembro portador comprende accionar un inductor de oblicuidad (3007) acoplado al primer y segundo miembro portador, estando configurado el inductor de oblicuidad para hacer que gire el primer miembro portador en una primera dirección de rotación en torno al eje longitudinal, y para hacer que gire el segundo miembro portador en una segunda dirección de rotación en torno al eje longitudinal, donde la primera dirección de 5 rotación es sustancialmente opuesta a la segunda dirección de rotación.
9. El método de la reivindicación 8, que comprende además el paso de medir la relación de velocidades real del CVAD.
10. El método de la reivindicación 9, que comprende además el paso de comparar la relación de velocidades real del CVAD con la relación de velocidades en el punto de ajuste para, de ese modo, generar un valor de comparación.
11. El método de la reivindicación 8, que comprende además el paso de determinar una señal de mando del inductor
de oblicuidad, donde dicha señal de mando del inductor de oblicuidad está basada, al menos en parte, en un punto de ajuste para el ángulo de inclinación, y de aplicar la señal de mando del inductor de oblicuidad al inductor de oblicuidad para, de ese modo, ajustar la condición de oblicuidad de los satélites de tracción.
12. El método de la reivindicación 11, que comprende además el paso de medir el ángulo de inclinación real de los 15 satélites de tracción.
Patentes similares o relacionadas:
Transmisión continuamente variable, del 1 de Octubre de 2014, de Fallbrook Intellectual Property Company LLC (100.0%): Una placa estatórica para una transmisión continuamente variable (CVT) que tiene una pluralidad de satélites de tracción , cuya placa estatórica […]
Transmisión continuamente variable, del 23 de Octubre de 2013, de Fallbrook Intellectual Property Company LLC (100.0%): Una transmisión que comprende: un primer disco montado coaxialmente alrededor de un eje longitudinal de la transmisión; una pluralidad […]
Conjunto de estator y mecanismo de cambio de velocidad para una transmisión continuamente variable, del 2 de Octubre de 2013, de Fallbrook Intellectual Property Company LLC (100.0%): Un conjunto de estator para una transmisión variable continuamente (CVT) que tiene una pluralidad deconjuntos planetarios de tracción comprendiendo […]
 Transmisión continuamente variable, del 25 de Septiembre de 2013, de Fallbrook Intellectual Property Company LLC (100.0%): Una transmisión continuamente variable que comprende:
una pluralidad de satélites de tracción dispuestos angularmente alrededor de un eje longitudinal;
un eje […]
Transmisión continuamente variable, del 25 de Septiembre de 2013, de Fallbrook Intellectual Property Company LLC (100.0%): Una transmisión continuamente variable que comprende:
una pluralidad de satélites de tracción dispuestos angularmente alrededor de un eje longitudinal;
un eje […]
Transmisión continuamente variable, del 15 de Agosto de 2012, de Fallbrook Intellectual Property Company LLC (100.0%): Transmisión continuamente variable que tiene una pluralidad de planetas de tracción dispuestosangularmente alrededor de un eje de accionamiento principal […]
CAJA DE CAMBIOS DE VARIACION CONTINUA., del 16 de Julio de 2004, de LINEAR BICYCLES, INC.: Caja de cambios de variación continua, que comprende: un elemento de accionamiento giratorio ; tres o más reguladores de potencia , en la que cada uno de los […]
MEJORAS EN O RELACIONADAS CON TRANSMISIONES DE RELACION CONTINUA-VARIABLE., del , de TOROTRAK (DEVELOPMENT) LIMITED: UN VARIADOR PARA UNA TRANSMISION DE RELACION CONTINUAMENTE VARIABLE (CVT) DEL TIPO RODILLO DE TRACCION SEMITOROIDAL EN QUE SE PRODUCE UN CAMBIO DE RELACION CUANDO UN […]
 TRANSMISION VARIABLE CONTINUA, del 16 de Junio de 2008, de LINEAR BICYCLES, INC.: Transmisión que comprende: un árbol ; un elemento accionador giratorio giratoriamente montado en el árbol ; un elemento accionado giratorio giratoriamente […]
TRANSMISION VARIABLE CONTINUA, del 16 de Junio de 2008, de LINEAR BICYCLES, INC.: Transmisión que comprende: un árbol ; un elemento accionador giratorio giratoriamente montado en el árbol ; un elemento accionado giratorio giratoriamente […]