Sistemas de orientación y localización.
Un sistema de orientación y localización con capacidades de filtrado espacial que combina diversidad temporal,
de polarización y espacial para detectar las líneas de visión directas (LOS) y para suministrar estimaciones de localización y orientación de nodos móviles, que comprende:
- al menos una emisora de radio de posicionamiento que determina la orientación relativa y la localización relativa de cada nodo móvil que comparte con ella una línea de visión (LOS) directa, estando cada trayecto de onda de radio, incluyendo la LOS, caracterizado por una dirección de salida (DOD), una polarización de transmisión, así como una dirección de llegada (DOA) y una polarización de recepción; la emisora de radio de posicionamiento y los nodos móviles están equipados con:
-- un sistema de antenas múltiples que tiene capacidades de selección-conmutación de polarización;
-- un transceptor de radio que tiene filtrado espacial, así como capacidades de detección de orientación y localización; al menos uno de la emisora de radio de posicionamiento y los nodos 15 móviles incluyendo:
- un módulo de filtrado temporal que realiza una primera etapa de filtrado en los vectores de señal recibidos, permitiendo dicho proceso de filtrado, para una clasificación de los nodos de transmisión, en diferentes conjuntos de vectores; siendo cada conjunto de vectores un subconjunto de recogida de vectores que tienen casi las mismas fuerzas y las mismas propiedades de tiempo de llegada;
- un módulo de matrices de entrada múltiple salida múltiple (MIMO) (71), que opera en cada conjunto de vectores para proporcionar estimaciones de matrices de MIMO cuádruples, estando estas últimas compuestas respectivamente por un primer par de matrices MIMO copolarizadas obtenidas cuando se usan los modos de polarización circular similares en el lado tanto de los transmisores como en el de los receptores y un segundo par de matrices de canal MIMO con polarización cruzada obtenidas cuando se usan los diferentes modos de polarización circular en los lados tanto de los transmisores como en el de los receptores, siendo dicho módulo capaz de estimar las matrices de correlación de recepción y de transmisión que son introducidas en los algoritmos de detección espacial;
- un módulo de estimación de DOA y DOD multitrayecto (68) que opera en las cuatro matrices de correlación que pueden estimarse usando las matrices MIMO con polarización cruzada estimadas anteriores;
- un módulo de control (67), que opera en los rangos de matrices de canal MIMO con polarización cruzada, para controlar el módulo de estimación de DOA y DOD multitrayecto (68) para ejecutar un método de detección;
en el que el par de matrices de correlación de recepción, correspondientes a dos modos de polarización no emparejados diferentes (RHCP-LHCP y LHCP-RHCP), da origen a estimaciones del azimut-elevación multitrayecto de pares de ángulos de llegada (AOA);
en el que el par de matrices de correlación de transmisión, correspondiente a dos modos de polarización no emparejados diferentes (RHCP-LHCP y LHCP-RHCP), da origen a estimaciones del azimut-elevación multitrayecto de pares de ángulos de salida (AOD);
en el que la potencia de señal en los dos conjuntos estimados de AOA obtenidos en los modos de polarización que forman un espectro de polarización-espacial de recepción y la potencia de señal en los dos conjuntos estimados de AOD obtenidos, cada uno, en un modo de polarización diferente formando un espectro de polarización-espacial de transmisión;
dicho módulo de control (67) que ejecuta un algoritmo MUSIC o MVR que proporcionan, cada uno, dos espectros de polarización-espaciales de las señales recibidas multitrayecto; en el que la combinación de dos espectros de polarización-espaciales de recepción que proporciona un espectro de recepción común, también, la combinación de dos espectros de polarización-espaciales de transmisión proporciona un espectro de transmisión común, siendo dicha combinación una adición, una multiplicación o cualquier otra operación aritmética entre espectros, utilizándose espacialmente la operación de multiplicación para mejorar la calidad del espectro;
- un módulo de estimación de ángulos de inclinación y ganancias de canal multitrayecto (69), que usa el módulo de estimación de DOA y DOD multitrayecto (68) y el módulo de matrices de canal MIMO (71) para proporcionar medios para estimar.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2009/005826.
Solicitante: Groupe des Ecoles de Telecommunications Ecole National Superieure des Telecommunications.
Nacionalidad solicitante: Francia.
Dirección: 46, Rue Barrault 75634 Paris Cedex 13 FRANCIA.
Inventor/es: MARZOUKI,ABDELWAHED, ZEGHLACHE,DJAMAL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S3/72 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › Sistemas de diversidad especialmente adaptados para la localización de la dirección.
- G01S5/02 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › usando ondas de radio (G01S 19/00 tiene prioridad).
- G01S5/14 G01S 5/00 […] › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
PDF original: ES-2439965_T3.pdf
Fragmento de la descripción:
Sistemas de orientación y localización
Campo de la invención La presente invención se refiere, en general, al posicionamiento en sistemas inalámbricos, más particularmente a un sistema de orientación y localización con capacidades de filtrado espacial que combina diversidad temporal, de polarización y espacial para detectar la línea de visión (LOS) y para suministrar estimaciones de localización y orientación de los nodos móviles.
Antecedentes de la invención Dicho sistema es útil para suministrar estimaciones fiables de la localización y la orientación de un objeto. El sistema puede usarse en un entorno de radio multitrayecto en el que el objeto, que es el sujeto de la determinación de la localización y orientación, no comparte una línea de visión directa con la emisora de radio de posicionamiento o en un entorno de radio en el que existe al menos una línea de visión entre el objeto a localizar y la emisora de posicionamiento. Dicho sistema es capaz de funcionar en entornos de interior y de exterior. Proporciona, además, soluciones de filtrado espacial que son útiles para otros servicios de red inalámbrica, tales como mitigación de interferencias y mejora de la capacidad. La localización de un objeto remoto necesita parámetros intermedios concernientes a la localización y orientación relativas de nodos de retransmisión intermedios. En este caso, es importante conocer perfectamente no solo la localización relativa de nodos de retransmisión sino también su orientación relativa. Un dispositivo determinador de la orientación del tipo anterior es conocido del documento de patente EP 11617 601 que está relacionado con redes ad hoc. El sistema, tal como se desvela en este documento de patente, está diseñado para proporcionar la información de posicionamiento que necesitan estas redes. Otra aplicación está relacionada con grupos de boyas marinas que están flotando en el mar con el objetivo de medir algunos parámetros del agua tales como: temperatura, salinidad... y también otros del aire tales como fuerza del viento y demás, relativos a un área dada. Las orientaciones geográficas de estas boyas deben considerarse con cuidado en vista de la planificación de la trayectoria. La estimación ciega en redes MIMO se desvela en el artículo publicado de XIAN-ZHONG XIE ET AL. “A One-Step Method for Blind Identification of MIMO Signal”. Este artículo se refiere específicamente a estimación ciega en base a un
método de una etapa para identificación ciega en comunicación sin cooperación. La estimación ciega en redes MIMO también se desvela en el artículo publicado de YINGTAO NIU ET AL. “MIMO- OFDM Blind Multi-CFO Estimation: CS-MUSIC”. Este artículo se refiere específicamente a estimación ciega en base a una estimación Multi-CFO. Un objeto de la presente invención es proporcionar un dispositivo que tiene mejor rendimiento que la técnica anterior y, notablemente, proporcionar orientación de objetos sin necesidad de muchos puntos de acceso o puntos de anclaje (los satélites GPS están usando triangulación) .
Resumen de la invención De acuerdo con la invención, el sistema mencionado anteriormente es destacable en que el sistema realiza, al menos, las siguientes tareas:
-Estimación de canal MIMO por detección de señal multitrayecto y sin línea de visión (NLOS) estimando las matriz MIMO con polarización cruzada correspondientes a modos de polarización circular de transmisorreceptor no emparejados. Este proceso de estimación representa en sí mismo un filtrado multitrayecto, dado que un modo de polarización circular no puede cambiar cuando es transmitido a través de una línea de visión (LOS) incluso aunque el transmisor y el receptor estén orientados en mi (información mutua) uno con respecto al otro.
-El filtrado de subcanales en LOS eliminando la contribución multitrayecto en las matrices MIMO copolarizadas que están estimadas en un enlace de presentación en el que las polarizaciones en los lados del transmisor y el receptor son las mismas. El proceso de filtrado no puede realizarse de forma natural como en el caso de NLOS, es por eso que el filtrado se realiza mediante un algoritmo
-estimación independientemente de la localización y orientación de grupos de nodos que no pueden separarse en el tiempo usando sincronización de temporización
-estimación de las dos matrices MIMO con polarización cruzada correspondientes a polarizaciones circulares no emparejadas y dos matrices MIMO copolarizadas correspondientes a dos polarizaciones circulares no emparejadas
-polarización espacio-temporal usando códigos de bloque de espacio y tiempo de polarización diseñados para realizar una primera etapa de filtrado en el dominio temporal por un lado y para estimar las cuatro matrices MIMO anteriores por otro lado
-estimación de la dirección de llegada (DOA) , el ángulo de inclinación de la onda entrante (TAON) , la dirección de salida (DOD) y el ángulo de inclinación de la onda saliente (TAOUT) usando las matrices MIMO polarizadas estimadas
-Mejora de algoritmos de alta resolución tales como MUSIC o el MVR combinando sus espectros espaciales dependientes de polarización múltiple relativa
-Subsistema de determinación de localización y orientación cuando no está disponible ninguna línea de visión entre la emisora de radio de posicionamiento y el objeto que está sujeto a la operación de localización y orientación. Este subsistema también es útil para emisoras de radio de tecnología limitada con las que no pueden realizarse operaciones de MIMO ni de polarización múltiple. Debe observarse también que, en los métodos de localización basados en pérdida de trayecto, el problema de antenas no isótropas plantea un grave problema, dado que causa una estimación errónea de las distancias entre los nodos. La razón surge del hecho de que la pérdida de trayecto final es proporcional tanto a la ganancia de la antena de transmisión como a la ganancia de la antena de recepción. Las ganancias también dependen de la orientación de las antenas. Esto lo hace difícil de corregir a partir del efecto de anisotropías a través de una sencilla equiparación de ganancia. El subsistema propuesto es también una solución a estos problemas específicos.
Un aspecto importante de la invención es la posibilidad de usar las matrices MIMO copolarizadas filtradas para transmitir información que requiere una baja tasa de errores de bits y de usar matrices con polarización cruzada para información que demanda una menor calidad. Debe observarse que se realiza un filtrado adaptado de ondas reflejadas de una manera que mejora el filtrado natural proporcionado por la propia polarización.
Breve descripción de los dibujos La presente invención se describirá a continuación, por medio de ejemplos, en referencia a los dibujos adjuntos en los que:
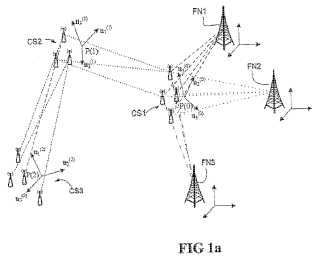
La figura 1a muestra el subsistema inalámbrico en el que puede aplicarse un sistema MIMO con capacidad de diversidad de polarización.
La figura 1b presenta un diagrama de bloques correspondiente al subsistema basado en MIMO y polarización de estimación de la localización y la orientación de acuerdo con la invención.
La figura 1c es un diagrama de bloques que muestra un ejemplo de un front-end de radio que puede usarse de acuerdo con la invención.
La figura 1d presenta el efecto del canal multitrayecto sobre las ondas transmitidas y la desorientación entre los nodos móviles en la red.
La figura 1e presenta el principio de agrupamiento de usuarios y detección de señales.
La figura 1f representa una descripción de alto nivel del proceso de orientación y localización iterativo que destaca la detección espacial y los bloques de filtrado de canales.
La figura 1g muestra el ángulo del espectro de llegada sin filtrado de canales.
La figura 1h muestra el ángulo del espectro de llegada después del filtrado de los componentes multitrayecto.
La figura 1i muestra los componentes principales del algoritmo de detección de la varianza mínima.
La figura 1j muestra los componentes principales del algoritmo de detección MUSIC.
La figura 1k muestra los componentes principales del algoritmo de emparejamiento.
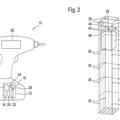
La figura 2 muestra un subsistema de determinación de localización y orientación en el que se usan antenas individuales con ganancias no isótropas en cada objeto que está sujeto a la operación de determinación de la localización y la orientación.
Descripción de las realizaciones preferidas La figura 1a es un ejemplo de subsistema de localización y orientación en el que pueden usarse la diversidad espacial yla diversidad de polarización combinadas. Éste... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de orientación y localización con capacidades de filtrado espacial que combina diversidad temporal, de polarización y espacial para detectar las líneas de visión directas (LOS) y para suministrar estimaciones de localización y orientación de nodos móviles, que comprende:
-al menos una emisora de radio de posicionamiento que determina la orientación relativa y la localización relativa de cada nodo móvil que comparte con ella una línea de visión (LOS) directa, estando cada trayecto de onda de radio, incluyendo la LOS, caracterizado por una dirección de salida (DOD) , una polarización de transmisión, así como una dirección de llegada (DOA) y una polarización de recepción; la emisora de radio de posicionamiento y los nodos móviles están equipados con:
-- un sistema de antenas múltiples que tiene capacidades de selección-conmutación de polarización; -- un transceptor de radio que tiene filtrado espacial, así como capacidades de detección de orientación y localización; al menos uno de la emisora de radio de posicionamiento y los nodos móviles incluyendo:
-un módulo de filtrado temporal que realiza una primera etapa de filtrado en los vectores de señal recibidos, permitiendo dicho proceso de filtrado, para una clasificación de los nodos de transmisión, en diferentes conjuntos de vectores; siendo cada conjunto de vectores un subconjunto de recogida de vectores que tienen casi las mismas fuerzas y las mismas propiedades de tiempo de llegada;
-un módulo de matrices de entrada múltiple salida múltiple (MIMO) (71) , que opera en cada conjunto de vectores para proporcionar estimaciones de matrices de MIMO cuádruples, estando estas últimas compuestas respectivamente por un primer par de matrices MIMO copolarizadas obtenidas cuando se usan los modos de polarización circular similares en el lado tanto de los transmisores como en el de los receptores y un segundo par de matrices de canal MIMO con polarización cruzada obtenidas cuando se usan los diferentes modos de polarización circular en los lados tanto de los transmisores como en el de los receptores, siendo dicho módulo capaz de estimar las matrices de correlación de recepción y de transmisión que son introducidas en los algoritmos de detección espacial;
-un módulo de estimación de DOA y DOD multitrayecto (68) que opera en las cuatro matrices de correlación que pueden estimarse usando las matrices MIMO con polarización cruzada estimadas anteriores;
-un módulo de control (67) , que opera en los rangos de matrices de canal MIMO con polarización cruzada, para controlar el módulo de estimación de DOA y DOD multitrayecto (68) para ejecutar un método de detección; en el que el par de matrices de correlación de recepción, correspondientes a dos modos de polarización no emparejados diferentes (RHCP-LHCP y LHCP-RHCP) , da origen a estimaciones del azimut-elevación multitrayecto de pares de ángulos de llegada (AOA) ; en el que el par de matrices de correlación de transmisión, correspondiente a dos modos de polarización no emparejados diferentes (RHCP-LHCP y LHCP-RHCP) , da origen a estimaciones del azimut-elevación multitrayecto de pares de ángulos de salida (AOD) ; en el que la potencia de señal en los dos conjuntos estimados de AOA obtenidos en los modos de polarización que forman un espectro de polarización-espacial de recepción y la potencia de señal en los dos conjuntos estimados de AOD obtenidos, cada uno, en un modo de polarización diferente formando un espectro de polarización-espacial de transmisión; dicho módulo de control (67) que ejecuta un algoritmo MUSIC o MVR que proporcionan, cada uno, dos espectros de polarización-espaciales de las señales recibidas multitrayecto; en el que la combinación de dos espectros de polarización-espaciales de recepción que proporciona un espectro de recepción común, también, la combinación de dos espectros de polarización-espaciales de transmisión proporciona un espectro de transmisión común, siendo dicha combinación una adición, una multiplicación o cualquier otra operación aritmética entre espectros, utilizándose espacialmente la operación de multiplicación para mejorar la calidad del espectro;
-un módulo de estimación de ángulos de inclinación y ganancias de canal multitrayecto (69) , que usa el módulo de estimación de DOA y DOD multitrayecto (68) y el módulo de matrices de canal MIMO (71) para proporcionar medios para estimar:
- - la intensidad de señal y un ángulo de inclinación de la onda saliente (TAOUT) para cada uno de los parámetros de DOD estimados; -- la intensidad de señal y un ángulo de inclinación de la onda entrante (TAON) para cada uno de los parámetros de DOA estimados; Dicho módulo de estimación de ángulos de inclinación y ganancias de canal multitrayecto (69) realiza una operación de emparejamiento con el objetivo de determinar, para cada uno de los parámetros de DOA estimados, los parámetros de DOD correspondientes, de modo que los parámetros de DOA/DOD emparejados describen las propiedades direccionales de un trayecto particular en ambos extremos del enlace transmisor y receptor;
-un módulo de filtrado de canal copolarizado (70) que retira los componentes de canal multitrayecto de las matrices de canal copolarizadas; dicho módulo de filtrado de canal copolarizado (70) reconstituye la matriz MIMO copolarizada originada multitrayecto usando como entradas:
-- las estimaciones de DOA y DOD proporcionadas por dicho módulo de estimación (68) -- las matrices MIMO copolarizadas proporcionadas por dicho módulo de matrices de canal MIMO (71) Dicho módulo de filtrado de canal copolarizado (70) estima de nuevo la ganancia de canal y los ángulos de inclinación para cada par de ángulos de DOA/DOD utilizando la matriz MIMO copolarizada reconstituida;
-un módulo de estimación de DOA y DOD de LOS (72) que opera en las matrices de canal copolarizadas filtradas proporcionadas por (70) y que ejecuta el algoritmo MUSIC o MVR ya seleccionado por (67) para suministrar algunos conjuntos de pares de DOA y DOD de ángulos de azimut-elevación correspondientes a trayectos de LOS, la misma combinación de diferentes espectros de polarización-espaciales que tienen la
posibilidad de ser aplicados como en dicho módulo de estimación (68) ;
-un módulo de estimación de “ángulos de inclinación y canal multitrayecto” de LOS (73) que usa información proporcionada por el módulo de estimación de DOA y DOD de LOS (72) y el módulo de filtrado de canal copolarizado (70) , para suministrar estimaciones en cada LOS de TAON y TAOUT, estando dichos DOA, DOD, TAON, TAOUT de LOS estimados en el sistema de referencia del receptor;
-un determinador de posición y de orientación (75) que usa la información proporcionada por un módulo de estimación de ángulos de inclinación y canal multitrayecto de LOS (73) para determinar la localización y la orientación de cada transmisor con LOS identificada; este módulo usa la información proporcionada por dicho módulo de filtrado de canal copolarizado (70) , módulo de estimación de DOA y DOD de LOS (72) , el módulo de estimación de ángulos de inclinación y canal multitrayecto de LOS (73) y el módulo de filtrado temporal.
2. El sistema de orientación y localización de la reivindicación 1, en el que la estimación de la matriz de rotación de orientación de transmisor-receptor usa el hecho de que, cuando el transmisor y el receptor se desorientan uno con respecto al otro, el par de DOD y TAOUT en el sistema de referencia del transmisor es en general diferente del par de DOA y TAON en el sistema de referencia del lado del receptor incluso aunque el transmisor y el receptor compartan un mismo LOS.
3. El sistema de orientación y localización de la reivindicación 1, en el que la orientación del transmisor con respecto al receptor se consigue combinando DOA, DOD, TAOUT y TAON.
4. El sistema de orientación y localización de la reivindicación 1, en el que la detección de las ondas NLOS (multitrayecto) se realiza usando el espectro de polarización-espacial en antenas polarizadas no emparejadas lo que significa que si las antenas de transmisión tienen polarización circular dextrógira (RH) , las antenas de recepción tienen (respectivamente transmisor) ; El superíndice H significa el conjugado Hermitiano; el símbolo γl', l indica el ángulo de inclinación; Cq'q (l', l, i) es un número complejo que indica la ganancia de canal a lo largo del trayecto i y que corresponde a un estado de polarización transmitido q' y un estado de polarización recibido q; Cq', q (l', l, i, τ', τ) = pl', lδq, q' donde Pl', l es un factor de pérdida de trayecto compleja que depende de la distancia entre los dos nodos y k = (2π/λ) ;
en el que la matriz de canal MIMO de primer rango correspondiente a un AOD y un AOA es el producto de un vector de dirección que describe la onda recibida y el conjugado Hermitiano (traspuesta conjugada) del vector de dirección que describe la onda transmitida, siendo dicho AOA y el AOD los de los vectores que describen la dirección de la onda de propagación, lo que significa que el AOA y el AOD son los mismos si los vectores de base del sistema de referencia tanto del transmisor como del receptor también son iguales.
5. El sistema de orientación y localización de la reivindicación 1, en el que la combinación de dos espectros de polarización-espaciales de recepción y la combinación de dos espectros de polarización-espaciales de transmisión puede ser adición, multiplicación o cualquier otra operación aritmética entre espectros, siendo la operación de multiplicación usada especialmente para mejorar la calidad del espectro.
6. El sistema de orientación y localización de la reivindicación 1 y 5, en el que la combinación de dos espectros de polarización-espaciales puede realizarse usando una operación de multiplicación para mejorar la calidad del espectro combinado.
7. El sistema de orientación y localización de la reivindicación 1, en el que la estimación de ángulos de inclinación y ganancias de canal multitrayecto se consigue usando los DOA y DOD multitrayecto y las matrices MIMO con polarización cruzada.
8. El sistema de orientación y localización de la reivindicación 1, en el que el módulo de estimación de ángulos de inclinación y ganancias de canal multitrayecto (69) realiza una operación de emparejamiento con el objetivo de asociar un parámetro estimado de DOD a cada parámetro estimado de DOA.
9. La orientación y localización de la reivindicación 1, en la que se consigue un filtrado de canal copolarizado en tres etapas:
-en una primera etapa, se realiza una estimación de las ganancias de canal y los ángulos de inclinación en cada enlace usando como entradas:
-- los parámetros de DOA y DOD en cada enlace multitrayecto. Estos parámetros se estiman usando las matrices MIMO con polarización cruzada -- las matrices MIMO copolarizadas;
-en una segunda etapa, la parte multitrayecto de la matriz de canal MIMO copolarizada se reconstituye usando los parámetros estimados en la primera etapa
-en una tercera etapa, la parte multitrayecto de la matriz de canal MIMO copolarizada se sustrae de la matriz MIMO copolarizada original.
10. El sistema de orientación y localización de la reivindicación 1, en el que se realiza una estimación de DOA y DOD de LOS usando las matrices MIMO copolarizadas filtradas.
11. El sistema de orientación y localización de la reivindicación 1, en el que se estiman los ángulos de inclinación de LOS usando DOA y DOD de LOS y la matriz MIMO copolarizada filtrada.
12. El sistema de orientación y localización de la reivindicación 1, en el que el determinador de localización y orientación
(75) usa la información proporcionada por un módulo de estimación de ángulos de inclinación y canal multitrayecto de LOS (73) para determinar la localización y la orientación de cada transmisor con LOS identificada.
13. El sistema de orientación y localización de acuerdo con cualquiera de las reivindicaciones 1 a 12, en el que el módulo de filtrado de canal copolarizado (70) lleva a cabo las siguientes tareas:
-usa una matriz de canal MIMO copolarizada filtrada para transmitir la información que requiere una baja tasa de errores de bits y -usa una matriz con polarización cruzada para información que no requiere una buena calidad.
14. El sistema de orientación y localización de acuerdo con cualquiera de las reivindicaciones 1 a 13, en el que el módulo de estimación de ganancias de canal (69) , el módulo realiza una tarea adicional que consiste en una prueba de la reciprocidad del canal (105) , cuando se usa para estimar la ganancia de cada multitrayecto.
15. El sistema de orientación y localización de acuerdo con cualquiera de las reivindicaciones 1 a 14, en el que un probador de reciprocidad (105) que, en base a los conjuntos de AOA y AOD dados y las matrices de canal promediadas sobre el modo de polarización cruzada, puede comprobar si las ganancias complejas del canal que son estimadas por separado corresponden o no a un canal recíproco.
16. El sistema de orientación y localización de acuerdo con la reivindicación 15, en el que la métrica usada por el probador de reciprocidad (105) para evaluar la distancia entre las matrices diagonales calculadas Viena dada por la fórmula:
17. El sistema de orientación y localización de acuerdo con cualquiera de las reivindicaciones 1 a 16, en el que el módulo de ganancia de canal (69) comprende, además, los siguientes bloques:
- un bloque de permutación (106) que genera todas las posibles permutaciones del conjunto de pares de AOD
- un módulo de decisión de emparejamiento (109) , cuya tarea es combinar un AOD en cada AOA, estando la operación de emparejamiento basada en la optimización de criterios dados, notablemente la maximización de la función de probabilidad logarítmica o la minimización de la distancia entre la matriz de canal reconstruida y la de ruido real.
18. El sistema de orientación y localización de acuerdo con cualquiera de las reivindicaciones 1 a 17, en el que la variabilidad del perfil de ganancia de potencia angular de la antena se usa para determinar la orientación de la antena.
19. El sistema de orientación y localización de acuerdo con cualquiera de las reivindicaciones 1 a 18, en el que la variabilidad del perfil de ganancia de potencia angular de la antena se usa para corregir el problema de anisotropía de la antena en métodos de localización .
Patentes similares o relacionadas:
Sistema de posicionamiento para satélite artificial geoestacionario, del 18 de Marzo de 2020, de Sky Perfect JSAT Corporation: Sistema de medición de posición para un satélite artificial geoestacionario , comprendiendo el sistema: dos o más antenas, que incluyen, como […]
Ubicación de la posición para sistemas de comunicación inalámbrica, del 11 de Marzo de 2020, de QUALCOMM INCORPORATED: Un procedimiento, que comprende: recibir una señal piloto de ubicación de la posición desde una estación base en una estación móvil , la señal piloto de ubicación […]
Formato de trama de difusión de tiempo de salida (TOD), del 4 de Marzo de 2020, de QUALCOMM INCORPORATED: Un procedimiento de medición de alcance entre una o más estaciones inalámbricas, STA, y un primer punto de acceso, AP, el procedimiento que comprende: […]
SISTEMA DE AJUSTE FINO PARA LOCALIZACIÓN Y DEFINICIÓN DE OBJETOS MEDIANTE UNA DISPOSICIÓN DE ANTENAS RFID, del 12 de Febrero de 2020, de GUTIÉRREZ GONZÁLEZ, Noel: 1. Sistema de ajuste fino para la localización y definición de objetos mediante una disposición de antenas RFID, y donde dichos objetos pueden estar parados o […]
Sistema y método para proporcionar servicios basados en ubicación a bordo de una aeronave, del 13 de Noviembre de 2019, de THE BOEING COMPANY: Sistema para proporcionar servicios basados en ubicación a bordo de una aeronave para usuarios que tienen dispositivos […]
 Ubicación de la posición para sistemas de comunicación inalámbrica, del 18 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento, que comprende:
establecer una sesión de recepción y/o de transmisión discontinuas entre una estación móvil y una célula de servicio de […]
Ubicación de la posición para sistemas de comunicación inalámbrica, del 18 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento, que comprende:
establecer una sesión de recepción y/o de transmisión discontinuas entre una estación móvil y una célula de servicio de […]
 Supervisión y/o establecimiento de protocolos de una posición de una herramienta en una caja de ascensor, del 28 de Agosto de 2019, de INVENTIO AG: Sistema para la supervisión y/o creación de protocolo de una posición de una herramienta en una caja de ascensor , comprendiendo el sistema: […]
Supervisión y/o establecimiento de protocolos de una posición de una herramienta en una caja de ascensor, del 28 de Agosto de 2019, de INVENTIO AG: Sistema para la supervisión y/o creación de protocolo de una posición de una herramienta en una caja de ascensor , comprendiendo el sistema: […]
Medición de temporización fina segura, del 14 de Agosto de 2019, de QUALCOMM INCORPORATED: Un aparato para proporcionar un intercambio de medición de temporización fina, FTM, segura que comprende: medios para obtener un valor de token seguro inicial y […]