Sistema de transporte de pasajeros y método de control relativo.
Un sistema de transporte de pasajeros que comprende:
- al menos un rail (12,
13, 14) que se extiende a lo largo de una trayectoria (P1);
- al menos un carro (16) movible a lo largo del rail (12, 13, 14);
- un dispositivo de accionamiento que comprende un motor (5) eléctrico lineal, que comprende a su vez al menos una corredera (21) ajustada al carro (16), y un estator (11) lineal que se extiende al menos parcialmente a lo largo de la trayectoria (P1), y que comprende un cuerpo (23) alargado, y un número de devanados (24) de potencia embebidos en el cuerpo (23) alargado; caracterizado por comprender un número de sensores (25) para controlar la posición del carro (16); estando ajustados los sensores (25) al cuerpo (23) alargado y situados de esta manera para minimizar ruido generado mediante los devanados (24) de potencia en los sensores (25).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2010/003328.
Solicitante: ROLIC INTERNATIONAL S.A R.L.
Nacionalidad solicitante: Luxemburgo.
Dirección: 1, Boulevard de la Foire 1528 Luxembourg LUXEMBURGO.
Inventor/es: SONNERER, WALTER, CONTE, GIUSEPPE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B61B3/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B61 FERROCARRILES. › B61B SISTEMAS FERROVIARIOS; EQUIPAMIENTOS A ESTE EFECTO NO PREVISTOS EN OTRO LUGAR (ascensores o montacargas, elevadores, escaleras o aceras mecánicas B66B). › Sistemas ferroviarios elevados con vehículos suspendidos (con vías flexibles suspendidas B61B 7/00; tipo de balancín o equilibrio análogo con monorraíl B61B 13/06; con cables de arrastre y para el transporte de materiales B65G; vía para este fin E01B 25/00).
PDF original: ES-2453270_T3.pdf
Fragmento de la descripción:
Sistema de transporte de pasajeros y método de control relativo
Campo técnico La presente invención se refiere a un sistema de transporte de pasajeros y método de control relativo.
Más específicamente, la presente invención se refiere a un sistema de transporte que comprende:
- al menos un rail que se extiende a lo largo de una trayectoria; -al menos un carro movible a lo largo del rail; y -un dispositivo de accionamiento que comprende un motor eléctrico lineal, que comprende a su vez al menos una corredera ajustada al carro, y un estator lineal que se extiende al menos parcialmente a lo largo de la trayectoria, 15 y que comprende un cuerpo alargado, y un número de devanados de potencia embebidos en el cuerpo alargado. Véase por ejemplo el documento US-A-3.834.316.
La corredera se mueve mediante un campo magnético generado mediante el estator lineal, y se controla mediante el campo magnético como una función de la posición o velocidad de la corredera. 20
Antecedentes de la técnica En un sistema de transporte que comprende un motor eléctrico lineal, la posición de la corredera se determina normalmente mediante sensores de proximidad, como se describe en la Solicitud de Patente WO 2009/019259.
El funcionamiento correcto del sistema de transporte por lo tanto depende directamente de los sensores, y en particular de la localización de los sensores.
Un sistema de transporte normalmente se instala instalando en primer lugar los componentes estructurales, y a 30 continuación los componentes de control.
Si los sensores se localizan erróneamente durante la instalación del sistema, por ejemplo, en la posición errónea (demasiado cerca o demasiado lejos) , con respecto al rail, y por lo tanto con respecto al área de tránsito de la corredera, esto podría dar como resultado malfuncionamiento del sistema, con todo el coste y tiempo de montaje o reparación que esto conlleva.
Divulgación de la invención Es un objeto de la presente invención proporcionar un sistema de transporte concebido para eliminar los anteriores 40 inconvenientes de la técnica conocida, y en particular para proporcionar un sistema de transporte del anterior tipo, que puede instalarse de forma barata y fácil.
Otro objeto de la presente invención es proporcionar un sistema de transporte que es menos susceptible a defectos de instalación. 45 De acuerdo con la presente invención, se proporciona un sistema de transporte de pasajeros que comprende:
- al menos un rail que se extiende a lo largo de una trayectoria; -al menos un carro movible a lo largo del rail;
-un dispositivo de accionamiento que comprende un motor eléctrico lineal, que comprende a su vez al menos una corredera ajustada al carro, y un estator lineal que se extiende al menos parcialmente a lo largo de la trayectoria, y que comprende un cuerpo alargado, y un número de devanados de potencia embebidos en el cuerpo alargado; caracterizado por comprender un número de sensores para controlar la posición del carro; estando ajustados los sensores al cuerpo alargado y situados de tal manera para minimizar el ruido generado mediante los devanados 55 de potencia en los sensores.
En la presente invención, los sensores pueden ajustarse con precisión al cuerpo alargado en la planta de producción, antes de instalar el sistema, evitando de esta manera cualquier problema planteado por el montaje inapropiado de los sensores en la etapa de instalación.
En una realización preferida, los sensores están embebidos en el cuerpo alargado.
En la presente invención, los sensores se instalan de manera desmontable en la mejor posición para asegurar el correcto funcionamiento del sistema de transporte. 65
En otra realización preferida, el devanado de potencia genera un primer campo magnético mediante el paso de corriente en el devanado de potencia; la corredera comprende medios para generar un segundo campo magnético que interactúa con el primer campo magnético y mueve la corredera a lo largo de la trayectoria; el sensor comprende un devanado de control; y el segundo campo magnético atraviesa el devanado de control cuando la corredera viaja cerca del devanado de control; generando el devanado de control corriente mediante la interacción con el segundo campo magnético.
En la presente invención, el devanado de control determina eficazmente el paso de la corredera de una manera simple, funcional y de bajo coste y no necesita potencia, gracias a que el paso de la corredera se determina mediante la interacción del segundo campo magnético en el devanado de control; interacción que genera una señal de detección en el devanado de control -en el ejemplo mostrado, en la forma de una tensión o corriente eléctrica generada al vincular el segundo campo magnético con el devanado de control.
Otro objeto de la presente invención es proporcionar un método para controlar un sistema de transporte del anterior 15 tipo, concebido para eliminar las inconvenientes de la técnica conocida.
Otro objeto de la presente invención es proporcionar un método eficaz, simple, para controlar un sistema de transporte.
De acuerdo con la presente invención, se proporciona un método de control de sistema de transporte; comprendiendo el sistema de transporte un dispositivo de accionamiento que comprende a su vez un motor eléctrico lineal, que comprende al menos una corredera y un estator lineal que se extiende al menos parcialmente a lo largo de una trayectoria, que comprende un cuerpo alargado y que comprende a su vez al menos un devanado de potencia embebido en el cuerpo alargado; y un sensor que comprende al menos un devanado de control; siendo magnéticamente conectables la corredera y el estator lineal para inducir movimiento de la corredera a lo largo de la trayectoria; y comprendiendo el método las etapas de detectar una señal de tránsito por medio del devanado de control, y determinar una posición o velocidad de la corredera como una función de la señal de tránsito.
Breve descripción de los dibujos Se describirá una realización no limitante de la presente invención a modo de ejemplo con referencia a los dibujos adjuntos, en los que:
La Figura 1 muestra una vista en planta parcialmente en sección, con partes eliminadas por claridad, de un sistema de transporte de cable equipado con un motor eléctrico lineal; La Figura 2 muestra una vista frontal parcialmente en sección a mayor escala, con partes eliminadas por claridad, de un detalle del sistema de transporte de cable de la Figura 1; La Figura 3 muestra una vista en perspectiva parcialmente en sección, con partes eliminadas por claridad, de un detalle del motor eléctrico lineal del sistema de transporte de cable de la Figura 1;
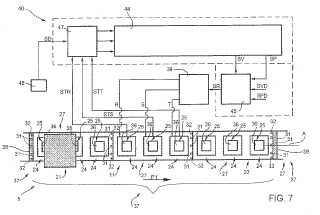
La Figura 4 muestra una vista en perspectiva despiezada esquemática, con partes eliminadas por claridad, de un detalle del motor eléctrico lineal en la Figura 3; La Figura 5 muestra una vista en planta parcialmente en sección a mayor escala, con partes eliminadas por claridad, del detalle del motor eléctrico lineal en la Figura 1; La Figura 6 muestra una vista en perspectiva, parcialmente en sección, parcialmente despiezada, con partes 45 eliminadas por claridad, de un detalle del motor eléctrico lineal en la Figura 1; La Figura 7 muestra un esquema de un detalle del motor eléctrico lineal en la Figura 1, y una unidad de control relativo.
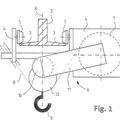
Mejor modo para realizar la invención 50 El número 1 en la Figura 1 indica un sistema de transporte de pasajeros. En el ejemplo de la Figura 1, el sistema 1 de transporte es un sistema de transporte de cable, y comprende un cable 2 de arrastre en bucle; y un número de unidades 3 de transporte del tipo que se pueden suspender desde el cable 2 de arrastre -tales como sillas de un telesilla o cabinas de un sistema teleférico -y movibles a lo largo de una trayectoria P1 dada.
El sistema 1 de transporte comprende una estación 4 de pasajeros; y un dispositivo de accionamiento que comprende a su vez un motor 5 eléctrico lineal para dirigir las unidades 3 de transporte a la estación 4 de pasajeros.
El motor 5 eléctrico lineal está localizado parcialmente en las unidades 3 de transporte y parcialmente en la estación 60 4 de pasajeros.
La estación 4 de pasajeros, que en el ejemplo mostrado es una estación giratoria, comprende una polea 6, alrededor de la que el cable 2 de arrastre está en bucle; una unidad 7 de control; y un bastidor 8 que soporta las unidades 3 de transporte en la estación 4 de pasajeros.
El bastidor 8 se extiende a lo largo de una porción de la trayectoria P1, y comprende una viga 9 que, vista desde arriba, es con forma de U, y soporta un número de estructuras 10 de soporte.
El motor... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de transporte de pasajeros que comprende:
-al menos un rail (12, 13, 14) que se extiende a lo largo de una trayectoria (P1) ; -al menos un carro (16) movible a lo largo del rail (12, 13, 14) ; -un dispositivo de accionamiento que comprende un motor (5) eléctrico lineal, que comprende a su vez al menos una corredera (21) ajustada al carro (16) , y un estator (11) lineal que se extiende al menos parcialmente a lo largo de la trayectoria (P1) , y que comprende un cuerpo (23) alargado, y un número de devanados (24) de potencia embebidos en el cuerpo (23) alargado; caracterizado por comprender un número de sensores (25) para controlar la posición del carro (16) ; estando ajustados los sensores (25) al cuerpo (23) alargado y situados de esta manera para minimizar ruido generado mediante los devanados (24) de potencia en los sensores (25) .
2. Un sistema de transporte como se reivindica en la reivindicación 1, donde los sensores (25) están embebidos en 15 el cuerpo (23) alargado.
3. Un sistema de transporte como se reivindica en la reivindicación 1 o 2, donde el cuerpo (23) alargado comprende un número de unidades (27) modulares alineadas entre sí a lo largo de la trayectoria (P1) ; extendiéndose cada unidad (27) modular a lo largo de un eje de simetría (A) , y siendo en la forma de una placa plana o curvada para definir unas porciones rectas o curvadas de la trayectoria (P1) respectivamente.
4. Un sistema de transporte como se reivindica en la reivindicación 3, donde cada unidad (27) modular comprende un número dado del número de devanados (24) de potencia; y un número de elementos (31) de conexión de potencia para conectar el número dado de devanados (24) de potencia al número dado de devanados (24) de
potencia de una unidad (27) modular adyacente; siendo paralelo cada elemento (31) de conexión de potencia al eje de simetría (A) , teniendo preferentemente cada unidad (27) modular dos caras (30) finales, cada una de ellas enfrentada hacia una cara (30) final de la unidad (27) modular adyacente; y estando localizados los elementos (31) de conexión de potencia en las caras (30) finales y siendo simétricos con respecto al eje de simetría (A) .
5. Un sistema de transporte como se reivindica en la reivindicación 3 o 4, donde cada unidad (27) modular comprende un número dado del número de sensores (25) ; y un número de elementos (32) de conexión de control para conectar el número dado de sensores (25) de la unidad (27) modular al número dado de sensores (25) de la unidad (27) modular adyacente; siendo paralelo cada elemento (32) de conexión de control al eje de simetría (A) ; teniendo preferentemente cada unidad (27) modular dos caras (30) finales, enfrentándose cada una a una cara (30)
final de la unidad (27) modular adyacente; y estando localizados los elementos (32) de conexión de control en las caras (30) finales.
6. Un sistema de transporte como se reivindica en una cualquiera de las reivindicaciones anteriores, donde el devanado (24) de potencia comprende al menos una primera bobina (34) enrollada alrededor de un primer eje (A1) , y una segunda bobina (35) enrollada alrededor de un segundo eje (A2) ; estando conectadas la primera y la segunda bobinas (34, 35) entre sí; teniendo la primera bobina (34) una primera dirección (V1) de devanado, y teniendo la segunda bobina (35) una segunda dirección (V2) de devanado; y siendo opuestas la primera dirección (V1) de devanado y la segunda dirección (V2) de devanado.
7. Un sistema de transporte como se reivindica en una cualquiera de las reivindicaciones anteriores, donde el devanado (24) de potencia genera un primer campo magnético mediante el paso de corriente en dichos devanados (24) de potencia; comprendiendo la corredera (21) medios para generar un segundo campo magnético que interactúa con el primer campo magnético y mueve la corredera (21) a lo largo de la trayectoria (P1) ; comprendiendo el sensor (25) un devanado (36) de control; y el segundo campo magnético atraviesa el devanado (36) de control cuando la corredera (21) viaja cerca del devanado (36) de control; generando el devanado (36) de control corriente mediante interacción con el segundo campo magnético.
8. Un sistema de transporte como se reivindica en la reivindicación 7, donde el devanado (24) de potencia comprende al menos una primera bobina (34) enrollada alrededor de un primer eje (A1) , y una segunda bobina (35)
enrollada alrededor de un segundo eje (A2) ; estando conectadas la primera y segunda bobinas (34, 35) entre sí; teniendo la primera bobina (34) una primera dirección (V1) de devanado, y teniendo la segunda bobina (35) una segunda dirección (V2) de devanado; siendo opuestas la primera dirección (V1) de devanado y la segunda dirección (V2) de devanado; y el devanado (36) de control está localizado al menos parcialmente entre la primera y la segunda bobinas (34, 35) , define una región en el espacio encerrada mediante el devanado (36) de control y se atraviesa mediante el primer campo magnético en la primera y segunda bobinas (34, 35) , y está concebido de modo que el flujo magnético total del primer campo magnético del devanado (24) de potencia vinculado al devanado (36) de control es sustancialmente nulo.
9. Un sistema de transporte como se reivindica en la reivindicación 7 u 8, donde el devanado (36) de control tiene un 65 plano de simetría equidistante desde el primer eje (A1) y el segundo eje (A2) .
10. Un sistema de transporte como se reivindica en la reivindicación 8, donde la primera y segunda bobinas (34, 35) radican en dos planos paralelos, y forman un hueco entre los dos planos paralelos; estando localizado el devanado (36) de control en dicho hueco.
11. Un sistema de transporte como se reivindica en una cualquiera de las reivindicaciones 7 a 10, donde el devanado (36) de control es conectable a la corredera (21) para generar una señal de tránsito (STR, STS, STT) ; generándose la señal de tránsito (STR, STS, STT) mediante la variación del flujo magnético producida mediante el movimiento relativo de la corredera (21) con respecto al devanado (36) de control.
12. Un sistema de transporte como se reivindica en una cualquiera de las reivindicaciones 7 a 11, y que comprende una unidad (40) de control conectada a los devanados (36) de control para recibir las señales de tránsito (STR, STS, STT) , y concebido para controlar los devanados (24) de potencia como una función de las señales de tránsito (STR, STS, STT) .
13. Un sistema de transporte como se reivindica en la reivindicación 12, donde la unidad (40) de control comprende un bloque (47) de compensación para compensar cualquier ruido en las señales de tránsito (STR, STS, STT) .
14. Un sistema de transporte como se reivindica en la reivindicación 12 o 13, y que comprende un devanado (46, 36) de referencia situado de manera que el primer campo magnético del devanado (24) de potencia no se vincula con el devanado (46) de referencia; y donde la unidad (40) de control está conectada al devanado (46) de referencia para recibir una señal de ruido (SD) correlacionada con cualquier ruido captado mediante el devanado (46; 36) de referencia.
15. Un sistema de transporte como se reivindica en la reivindicación 14, donde el devanado (46) de referencia es 25 uno de los devanados (36) de control asociados con un devanado (24) de potencia no alimentado.
16. Un sistema de transporte como se reivindica en una cualquiera de las reivindicaciones 11 a 15, y que comprende un conjunto (39) de potencia conectado a dicho devanado (24) de potencia y para alimentar dicho devanado (24) de potencia con corriente eléctrica que tiene una amplitud (I) , una frecuencia (F) y una fase (R; S; T) calculadas en base a la señal de tránsito (STR, STS, STT) .
17. Un sistema de transporte como se reivindica en una cualquiera de las reivindicaciones anteriores, y que comprende un cable (2) de arrastre; al menos una unidad (3) de transporte conectada al carro (16) y conectable selectivamente al cable (2) de arrastre mediante un dispositivo (17) de acoplamiento; y al menos una estación (4) de
pasajeros donde la unidad (3) de transporte se desengrana del cable (2) de arrastre; extendiéndose el estator (11) lineal a lo largo de la estación (4) de pasajeros para mover la unidad (3) de transporte a lo largo de una porción de dicha trayectoria (P1) .
18. Un método de control de sistema de transporte; comprendiendo el sistema (1) de transporte un dispositivo de accionamiento que comprende a su vez un motor (5) eléctrico lineal, que comprende al menos una corredera (21) , y un estator (11) lineal que se extiende al menos parcialmente a lo largo de una trayectoria (P1) , que comprende un cuerpo (23) alargado y que comprende a su vez al menos un devanado (24) de potencia embebido en el cuerpo alargado; y un sensor (25) que comprende al menos un devanado (36) de control; siendo magnéticamente conectables la corredera (21) y el estator (11) lineal para inducir movimiento de la corredera (21) a lo largo de la 45 trayectoria (P1) ; y comprendiendo el método las etapas de detectar una señal de tránsito (STR, STS, STT) por medio del devanado (36) de control, y determinar una posición (P) o velocidad (V) de la corredera (21) como una función de la señal de tránsito (STR, STS, STT) .
19. Un método como se reivindica en la reivindicación 18, y que comprende la etapa de alimentar el devanado (24) de potencia como una función de la señal de tránsito (STR, STS, STT) .
20. Un método como se reivindica en la reivindicación 18 o 19, y que comprende las etapas de localizar el devanado
(36) de control de modo que el flujo magnético total producido mediante el devanado (24) de potencia y vinculado al
devanado (36) de control es sustancialmente nulo. 55
21. Un método como se reivindica en una cualquiera de las reivindicaciones 18 a 20, y que comprende las etapas de detectar cualquier ruido por medio de un devanado (46, 36) de referencia localizado de modo que un primer campo magnético generado mediante el devanado (24) de potencia no se vincula con el devanado de referencia; y procesar la señal de tránsito (STR, STS, STT) en base a cualquier ruido detectado.
22. Un método como se reivindica en una cualquiera de las reivindicaciones 18 a 21, y que comprende la etapa de controlar el motor (5) eléctrico lineal en base a la posición de la corredera (21) y/o la velocidad (V) de la corredera (21) .
23. Un método como se reivindica en una cualquiera de las reivindicaciones 18 a 22, donde el motor (5) eléctrico lineal comprende tres devanados (36) de control, cada uno asociados con una fase (R’, S’, T’) y que suministra una de las respectivas señales de tránsito (STR, STS, STT) ; comprendiendo el método las etapas de procesar las señales de tránsito (STR, STS, STT) para definir una señal de cuadratura que representa el componente de cuadratura de las señales de tránsito (STR, STS, STT) en un sistema de coordenadas móviles; y definir una velocidad (V) de la corredera (21) en base a la señal de cuadratura de las tres señales de tránsito (STR, STS, STT) .
24. Un método como se reivindica en una cualquiera de las reivindicaciones 18 a 23, donde la etapa de detectar una señal de tránsito (STR, STS, STT) comprende detectar una tensión en los terminales del devanado (36) de control en respuesta a variar el flujo magnético producido mediante el paso de la corredera (21) con el devanado (36) de control.
Patentes similares o relacionadas:
 Carro de pequeña dimensión vertical para elevador de cable metálico, del 25 de Septiembre de 2019, de KONECRANES GLOBAL CORPORATION: Un carro de pequeña dimensión vertical para un elevador de cable metálico, dispuesto para desplazarse a lo largo de un reborde inferior de una vigueta […]
Carro de pequeña dimensión vertical para elevador de cable metálico, del 25 de Septiembre de 2019, de KONECRANES GLOBAL CORPORATION: Un carro de pequeña dimensión vertical para un elevador de cable metálico, dispuesto para desplazarse a lo largo de un reborde inferior de una vigueta […]
DISTRIBUIDOR UNIVERSAL DE TRANSPORTES Y SERVICIOS PÚBLICOS, del 17 de Mayo de 2018, de SUAREZ AJO, David Williams: Es una estructura metálica aérea auto soportada tipo puente colgante cuya plataforma principal está diseñada en tres niveles. El nivel superior es para el desplazamiento de […]
Dispositivo de transferencia para carros de transporte e instalación de transporte que incluye el mismo, del 21 de Febrero de 2018, de Eisenmann SE: Dispositivo para transferir un carro de transporte que puede desplazarse sobre un sistema de carriles de un segmento de carril horizontal del sistema […]
 TRANSPORTE URBANO ELEVADO PERSONALIZADO, del 25 de Junio de 2015, de ZAMORANO-MORFIN, LUIS RODOLFO: Un transporte urbano elevado personalizado (TUEP) bidireccional, para una gran capacidad de transportación, el cual se encuentra suspendido sobre una serie de […]
TRANSPORTE URBANO ELEVADO PERSONALIZADO, del 25 de Junio de 2015, de ZAMORANO-MORFIN, LUIS RODOLFO: Un transporte urbano elevado personalizado (TUEP) bidireccional, para una gran capacidad de transportación, el cual se encuentra suspendido sobre una serie de […]
Sistema de transporte con freno magnético, del 2 de Junio de 2015, de GÓMEZ BENITO, Alejandro: 1. Sistema de transporte, preferentemente destinado para el ocio, con freno, que comprende, al menos, un vehículo, carro o similar que se desplaza entre una estación de salida […]
 Dispositivo automatizado para el cambio de raíl para railes aéreos soportados en el aire, del 24 de Diciembre de 2014, de CARRILLO LOSTAO, Luis: Dispositivo automatizado para cambio de raíl , para raíles aéreos soportados en el aire, de modo que comprende una bancada móvil desplazable […]
Dispositivo automatizado para el cambio de raíl para railes aéreos soportados en el aire, del 24 de Diciembre de 2014, de CARRILLO LOSTAO, Luis: Dispositivo automatizado para cambio de raíl , para raíles aéreos soportados en el aire, de modo que comprende una bancada móvil desplazable […]
INSTALACION PARA EL TRANSPORTE DE PERSONAS DESDE UNA ESTACION SUPERIOR A UNA ESTACION INFERIOR., del 16 de Julio de 2004, de INNOVA PATENT GMBH: Instalación para el transporte de personas desde una estación superior a una estación inferior a lo largo de un carril guía , sostenido por apoyos distanciados […]
 VIA DE CARRILES QUE CONSTA DE UNIONES DE CARRILES INDIVIDUALES, del 8 de Mayo de 2009, de NEUHAUSER GMBH: Vía de carriles que consta de uniones de carriles individuales, con al menos un elemento de identificación electrónica para las uniones de carriles […]
VIA DE CARRILES QUE CONSTA DE UNIONES DE CARRILES INDIVIDUALES, del 8 de Mayo de 2009, de NEUHAUSER GMBH: Vía de carriles que consta de uniones de carriles individuales, con al menos un elemento de identificación electrónica para las uniones de carriles […]