Sistema de tracción que usa un cable de múltiples tendones con un ángulo de desviación.
Sistema de tracción, que comprende:
- una pluralidad de tendones (2) sustancialmente paralelos que pueden moverse para tirar de una carga,
estando separados los tendones según un patrón en un plano perpendicular a los tendones; y
- al menos un desviador (3) para guiar los tendones, proporcionando el desviador una desviación angular de la pluralidad de tendones,
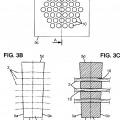
en el que el desviador incluye una estructura (4) de soporte y una pluralidad de segmentos (5) que tienen cada uno una superficie (5c) interna dirigida hacia una superficie (7) convexa de la estructura de soporte, superficies (5a, 5b) delantera y trasera y una pluralidad de canales (10) que se extienden desde la superficie delantera hasta la superficie trasera,
en el que los canales están dispuestos según dicho patrón en las superficies delantera y trasera de cada segmento, estando alojado cada tendón en uno respectivo de los canales,
en el que al menos algunos de los segmentos tienen sus superficies internas apoyadas sobre la superficie convexa de la estructura de soporte en respuesta a fuerzas de tensión aplicadas a los tendones.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12306050.
Solicitante: SOLETANCHE FREYSSINET.
Nacionalidad solicitante: Francia.
Dirección: 280 avenue Napoléon Bonaparte 92500 Rueil Malmaison FRANCIA.
Inventor/es: JAKOB,UELI, ABBUHL,MARKUS, JOSS,BEAT.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63B21/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › B63B 21/00 Aparatos de maniobra; Aparatos de desplazamiento, remolque o empuje; Anclaje (anclaje dinámico B63H 25/00; equipos para embarque en costas, puertos o en otras estructuras marinas fijas, p.ej. para aterrizaje, E02B). › Aparatos de fijación o de guía para cadenas, amarras, estachas o materiales análogos.
- B66C11/12 B […] › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 11/00 Carros o cabrias móviles, p. ej. que trabajan encima de la vía de rodadura (caminos o vías de rodadura B66C 7/00; mecanismos de cabrias B66D). › con mecanismo de elevación adaptado para elementos especiales de toma de carga, no previstos en otro lugar.
- B66C13/00 B66C […] › Otras características de estructura o detalles.
- B66D3/26 B66 […] › B66D CABRESTANTES; CABRIAS; APAREJOS, p. ej. POLIPASTOS; TROCOLAS (enrollado y desenrollado de cables con fines de alimentación o almacenado B65H; mecanismos de enrollado o desenrollado de cables para ascensores B66B; dispositivos de elevación especialmente adaptados a los andamios suspendidos E04G 3/32). › B66D 3/00 Aparatos de elevación o de tracción portátiles o móviles. › Otras partes constitutivas, p. ej. carcasas.
PDF original: ES-2533630_T3.pdf
Fragmento de la descripción:
Sistema de tracción que usa un cable de múltiples tendones con un ángulo de desviación Sector de la técnica La presente invención se refiere al campo de la elevación y manipulación de cargas pesadas, y más particularmente a un sistema de tracción que usa un cable que incluye una pluralidad de tendones sustancialmente paralelos que pueden moverse para tirar de una carga.
Estado de la técnica En determinadas configuraciones puede ser necesario disponer alguna desviación angular del cable de tracción, por ejemplo para esquivar un obstáculo y/o para proporcionar un efecto de palanca suficiente para llevar a cabo la operación de elevación o tensado. Dependiendo de la configuración, el ángulo de desviación del cable puede ser constante, o puede variar mientras la carga está en movimiento.
Cuando el cable de tracción está compuesto por tendones paralelos, por ejemplo cordones, su disposición en la sección transversal del cable debe controlarse para evitar esfuerzos por contacto transversal no deseados entre los tendones que dificultan la transferencia de las fuerzas de tracción a la carga y pueden dañar los tendones.
También es preferible equilibrar las fuerzas de tensión entre los múltiples tendones. De lo contrario, uno o varios de los tendones realizan la mayor parte del trabajo, lo que es perjudicial para la capacidad y durabilidad del cable.
Es difícil que un ángulo de desviación del cable de tracción de múltiples tendones cumpla con estos requisitos. Cuando el cable se desvía, algunos de los tendones tienen normalmente un mayor radio de curvatura y estos tendones tienden a experimentar fuerzas de tensión mayores y a presionarse contra otros tendones en el lado interno de la curvatura. El documento US6007275 da a conocer un sistema de tracción con tendones y desviadores.
Algunos sistemas de desviación usan poleas para reducir el trabajo de fricción. Una solución de este tipo puede ser difícil de implementar cuando los tendones del cable están dispuestos en múltiples capas. Es incompatible con determinadas operaciones de tracción, especialmente cuando deben aplicarse fuerzas de tracción muy altas, por ejemplo cuando debe elevarse, hacerse descender o arrastrar una carga muy pesada (por ejemplo un barco o una obra de construcción) , cuando debe tensarse, etc. un cable de pretensado estructural o de soporte de carga. Tales fuerzas de tracción muy altas requerirían poleas extremadamente robustas y se generarían una fricción y un esfuerzo excesivos en sus ejes y cojinetes.
Un objeto de la presente invención es proporcionar otra solución que sea más adecuada, en particular para operaciones de tracción con fuerzas de tracción muy altas aplicadas a cables de múltiples tendones.
Objeto de la invención Según la presente invención, un sistema de tracción comprende una pluralidad de tendones sustancialmente paralelos que pueden moverse para tirar de una carga y al menos un desviador para guiar los tendones para proporcionar una desviación angular de la pluralidad de tendones. Los tendones están separados para estar dispuestos según un patrón en un plano perpendicular a los tendones. El desviador incluye una estructura de soporte y una pluralidad de segmentos que tienen cada uno una superficie interna dirigida hacia una superficie convexa de la estructura de soporte, superficies delantera y trasera y una pluralidad de canales que se extienden desde la superficie delantera hasta la superficie trasera. Los canales están dispuestos según el patrón mencionado anteriormente en las superficies delantera y trasera de cada segmento, estando alojado cada tendón en uno respectivo de los canales. Al menos algunos de los segmentos tienen sus superficies internas apoyadas sobre la superficie convexa de la estructura de soporte en respuesta a fuerzas de tensión aplicadas a los tendones.
Pueden realizarse ángulos de desviación significativos, de desde 0º hasta 180º . El ángulo de desviación global puede variar a lo largo del tiempo si lo requiere la configuración de tracción. El movimiento de los tendones y la carga puede tener lugar en ambos sentidos, por ejemplo para elevar y hacer descender la carga. El grupo de tendones se guían según su patrón geométrico establecido. Por tanto, los tendones están protegidos frente al daño.
En una realización, los segmentos que tienen superficies internas apoyadas sobre la superficie convexa de la estructura de soporte forman una serie de n segmentos que hacen tope unos contra otros a lo largo de los tendones, donde n es un número mayor de 1, y para 1 < i â n, el segmento i-ésimo de la serie tiene su superficie delantera haciendo tope con la superficie trasera del segmento (i-1) -ésimo de la serie. Cada segmento del desviador asume un incremento (Îi) de desviación angular de los tendones donde i = 1, 2, ..., N es un índice para los N segmentos del
desviador, la serie mencionada anteriormente tiene normalmente un número n â N de segmentos de modo que la
** (Ver fórmula) **
desviación (Î) angular proporcionada por el desviador es de entre Realizaciones adicionales incluyen una o más de las siguientes características:
- el desviador comprende además al menos un tope dispuesto para limitar el movimiento de los segmentos a lo largo de la pluralidad de tendones;
- cada segmento del desviador asume un incremento de desviación angular en un intervalo de 0º a 12º o 10 más, preferiblemente de 0º a 5º ;
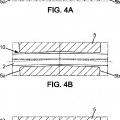
- la forma de cada canal de un segmento se selecciona para alojar un tendón flexionado con un incremento predeterminado de desviación angular, con una holgura suficiente para aceptar también el tendón que se extiende recto a través de dicho canal;
- los canales se abren a las superficies delantera y trasera de un segmento con bordes redondeados;
- los canales de un segmento tienen un perfil sustancialmente diédrico, con preferiblemente una forma curvada o de trompeta.
Descripción de las figuras Características y ventajas adicionales de la invención resultarán evidentes en la siguiente descripción detallada de realizaciones que se facilitan a modo de ejemplos no limitativos con referencia a los dibujos adjuntos, en los que:
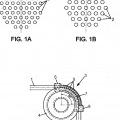
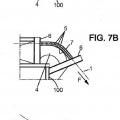
- las figuras 1A-B muestran ejemplos de patrones 2D según los cuales una pluralidad de tendones paralelos separados pueden estar dispuestos en la sección transversal de un cable de tracción;
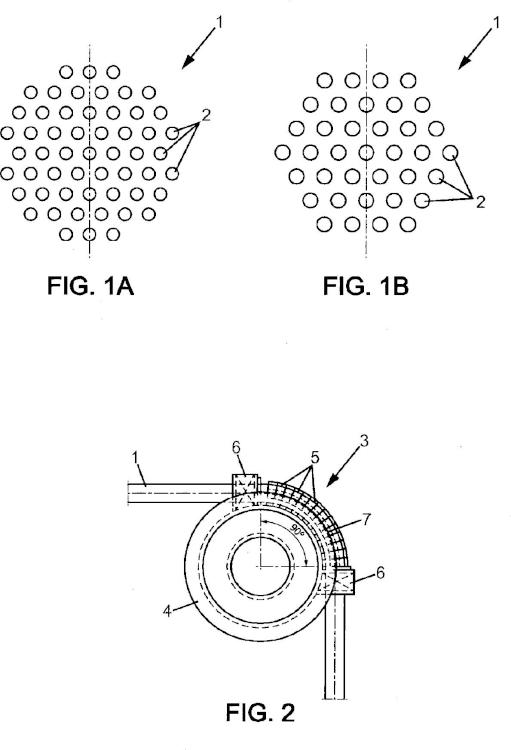
- la figura 2 ilustra un desviador según una realización de la invención;
- la figura 3A es una vista en sección transversal, perpendicular al cable de tracción, de un segmento de desviación a modo de ejemplo del desviador;
- la figura 3B es una vista lateral de ese segmento de desviación;
- la figura 3C es otra vista en sección transversal del segmento de desviación, a lo largo del plano A-A mostrado en la figura 3A;
- las figuras 4A-C son vistas en sección de parte de un segmento de desviación que muestran la forma de un 40 canal de guía según diferentes realizaciones de la invención;
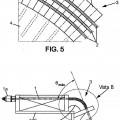
- la figura 5 es una vista lateral de parte de un desviador;
- la figura 6 ilustra un ejemplo de aplicación del sistema de tracción en el que el ángulo de desviación del 45 cable varía;
- la figura 7A-C son vistas ampliadas del detalle B de la figura 6, que muestran el desviador en diferentes fases con diferentes ángulos de desviación.
Descripción detallada de la invención La invención se describe a continuación en su aplicación a un sistema de elevación sin que esto implique ninguna limitación a otros tipos de aplicación. El sistema de elevación puede aplicarse en diversas configuraciones, incluyendo en entornos marinos, por ejemplo para elevar apoyándose en uno de sus extremos una estructura 55 sumergida total o parcialmente en agua.
El cable (1) usado en un sistema de tracción para trabajos de elevación de cargas pesadas o tensado incluye una pluralidad de tendones (2) paralelos que pueden tensarse para tirar de una carga acoplada a un extremo del cable. En perpendicular al cable, los tendones (2) paralelos están separados unos de otros según un patrón predefinido tal 60 como el mostrado en la figura 1A o 1B. Los tendones (2) pueden consistir en cordones de alambres metálicos, tales como alambres de acero con protección frente a la corrosión. Por ejemplo, consisten en un cordón de alta resistencia a la tensión de 7 alambres que tiene un diámetro nominal de 12 a 18 mm.
En el ejemplo de la figura 1A, el cable (1) de tracción consiste en 55 cordones (2) paralelos dispuestos según una malla hexagonal en un patrón que tiene una forma global de dodecágono.
La figura 1B muestra otro cable (1) compuesto... [Seguir leyendo]
Reivindicaciones:
1. Sistema de tracción, que comprende:
- una pluralidad de tendones (2) sustancialmente paralelos que pueden moverse para tirar de una carga, estando separados los tendones según un patrón en un plano perpendicular a los tendones; y -al menos un desviador (3) para guiar los tendones, proporcionando el desviador una desviación 10 angular de la pluralidad de tendones, en el que el desviador incluye una estructura (4) de soporte y una pluralidad de segmentos (5) que tienen cada uno una superficie (5c) interna dirigida hacia una superficie (7) convexa de la estructura de soporte, superficies (5a, 5b) delantera y trasera y una pluralidad de canales (10) que se extienden desde la superficie delantera hasta la superficie trasera, en el que los canales están dispuestos según dicho patrón en las superficies delantera y trasera de cada segmento, estando alojado cada tendón en uno respectivo de los canales, en el que al menos algunos de los segmentos tienen sus superficies internas apoyadas sobre la superficie convexa de la estructura de soporte en respuesta a fuerzas de tensión aplicadas a los tendones.
2. Sistema de tracción según la reivindicación 1, en el que dichos segmentos (5) que tienen superficies (5c) internas apoyadas sobre la superficie (7) convexa de la estructura (4) de soporte forman una serie de n segmentos que hacen tope unos contra otros a lo largo de los tendones (2) donde n es un número mayor de 1, y en el que para 1<iân, el segmento i-ésimo de dicha serie tiene su superficie (5a) delantera haciendo tope con la superficie (5b) trasera del segmento (i-1) -ésimo de dicha serie.
3. Sistema de tracción según la reivindicación 2, en el que cada segmento (5) del desviador (3) asume un incremento Îi de desviación angular de los tendones donde i = 1, 2, ..., N es un índice para los N segmentos del desviador, y dicha serie tiene un número n â N de segmentos de modo que la desviación angular
** (Ver fórmula) **
proporcionada por el desviador es de entre 4. Sistema de tracción según una cualquiera de las reivindicaciones anteriores, en el que el desviador (3)
comprende además al menos un tope (6) dispuesto para limitar el movimiento de los segmentos (5) a lo largo de la pluralidad de tendones (2) .
5. Sistema de tracción según una cualquiera de las reivindicaciones anteriores, en el que cada segmento (5) del desviador (3) asume un incremento (Îi) de desviación angular en un intervalo de 0º a 12º .
6. Sistema de tracción según una cualquiera de las reivindicaciones anteriores, en el que la forma de cada canal (10) de un segmento (5) se selecciona para alojar un tendón flexionado con un incremento (Îi) de desviación angular predeterminado, con una holgura suficiente para aceptar también el tendón que se extiende recto a través de dicho canal.
7. Sistema de tracción según una cualquiera de las reivindicaciones anteriores, en el que los canales (10) se abren a las superficies (5a, 5b) delantera y trasera de un segmento (5) con bordes redondeados.
8. Sistema de tracción según una cualquiera de las reivindicaciones anteriores, en el que los canales (10) de 50 un segmento (5) tienen un perfil sustancialmente diédrico.
Patentes similares o relacionadas:
Conexión de cable y procedimiento para producir una conexión de cable, del 15 de Julio de 2020, de SkySails Power GmbH: Conexión de cable con un ojo de cable, con una pieza de refuerzo insertada en el ojo de cable y con un elemento de sujeción, […]
Estopor, del 26 de Junio de 2019, de Flintstone Technology Limited: Un dispositivo , tal como un estopor, para conectar una cadena o línea o al menos una parte de una cadena o línea, tal como una cadena […]
Conjunto de amarre para una embarcación flotante, del 22 de Mayo de 2019, de Fobox AS: Una disposición de amarre (2, 2') para un dispositivo flotante (1, 12, 12') que comprende una banda y un tambor , estando adaptada dicha banda […]
Una unidad de energía de olas, un uso de la misma y un método para producir energía eléctrica, del 15 de Noviembre de 2018, de SEABASED AB: Una unidad de energía de olas que tiene al menos un cuerpo flotante , una estación sumergida y al menos unos medios de conexión flexibles que conectan […]
Polea, del 5 de Septiembre de 2018, de Ino-Rope: Polea que comprende: * una roldana monobloque que comprende dos caras longitudinales opuestas, un vaciado central transversal, y una superficie […]
ROLDANA, del 28 de Junio de 2018, de GOLDENBERG, Nicolás Alejandro: Polea que comprende una rueda o roldana que incorpora un receso central y una garganta ; y al menos una cuerda de fijación configurada para transmitir el […]
ELEMENTO DE AMARRE PARA EMBARCACIONES, del 22 de Marzo de 2018, de FOLCH ROPES, S. A: 1. Elemento de amarre para embarcaciones de los que están formados por unos bloques de hormigón armado, en cuyo cuerpo y en la parte superior, se dispone una anilla inmovilizada […]
SISTEMA RETICULADO DE FONDEO PARA ACUICULTURA, del 11 de Mayo de 2017, de BUSCHMANN SCHIRMER, Walter Francisco Alfredo: Sistema de reticulado de cabos o cuerdas para jaulas de cultivo de peces, formado por una estructura flotante de la cual pende y circunda una red pecera que encierra […]