SISTEMA PARA LA APLICACION AUTOMATICA DE UNA PELICULA PROTECTORA AUTO-ADHESIVA EN LAS CARROCERIAS DE VEHICULOS AUTOMOVILES.
Sistema o instalación para la aplicación automática de una película o lámina protectora auto-adhesiva sobre determinadas partes de carrocerías de vehículos automóviles;
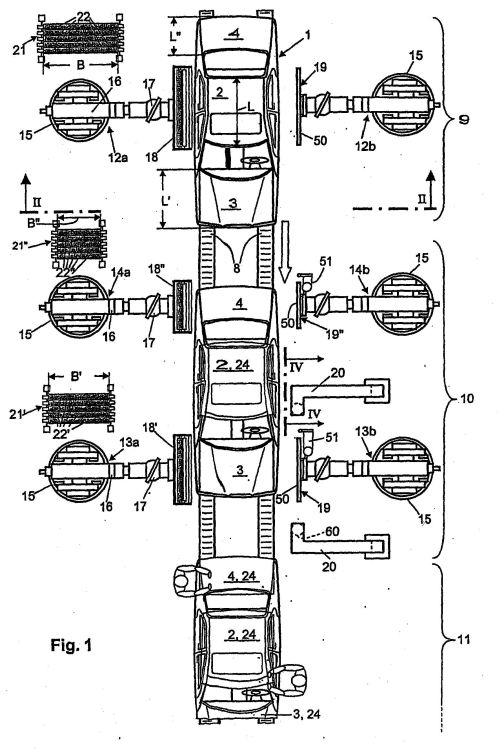
- Con varios puestos de trabajo (9, 10) que, dentro de la instalación, están dispuestos uno detrás del otro; - Con un dispositivo de transporte horizontal (8), que hace pasar las carrocerías (1) de los vehículos a tratar por los puestos de trabajo (9, 10) y por medio del cual las carrocerías (1) de los vehículos pueden ser retenidas - en cada uno de los puestos de trabajo (9, 10) y en una respectiva posición de trabajo bien definida - para la realización de trabajos de cierta envergadura; - Con por lo menos una pareja de robots industriales - denominados en lo sucesivo ¿robots de aplicación¿ (12a, 12b; 13a, 13b; 14a, 14b) - que en por lo menos uno de los puestos de trabajo (9, 10) están dispuestos de forma simétrica entre si así como por ambos lados del dispositivo de transporte horizontal (8) y están previstos para, en su conjunto, manipular y aplicar una respectiva pieza de lámina (24) al ser procesada la misma; a continuación, un puesto de trabajo (9, 10), equipado de este modo, es denominado ¿puesto de aplicación¿- Con unos dispositivos para una definida sujeción (18, 18¿, 18¿) de un respectivo rollo de reserva (22, 22¿, 22¿) y para el desenrollado (19, 19¿, 19¿) de las piezas de lámina protectora (24) de un rollo de reserva (22, 22¿, 22¿) por medio de un robot de aplicación (12a, 12b; 13a, 13b; 14a, 14b) así como con un dispositivo (41) para cortar del rollo de reserva (22, 22¿, 22¿) la desenrollada pieza de lámina (24); - Además, con un dispositivo para el trazado continuo de determinadas líneas de perforación en una pieza de lámina (24), que está siendo mantenida de forma extendida; Sistema éste que está caracterizado por el conjunto de las características siguientes: - En la instalación están previstos dos puestos de aplicación separados (9, 10) de los cuales el puesto de aplicación (10) comprende dos parejas (13 a, 13b y 14 a, 14b), mientras que el otro puesto de aplicación (9) comprende una pareja (12a, 12b) de los robots industriales (12a, 12b; 13 a, 13b; 14 a, 14b), que están situados de forma opuesta entre si para, en su conjunto, manipular y aplicar una respectiva pieza de lámina (24); - Dentro del respectivo puesto de aplicación (9, 10), el elemento de base (15) de cada robot de aplicación (12a, 12b; 13a, 13b; 14a, 14b) está dispuesto de forma estacionaria - es decir, de una manera inmóvil en relación con la dirección de transporte del dispositivo de transporte horizontal (8) - al lado de la posición de la correspondiente parte de carrocería (2, 3, 4), que ha de ser procesada por el robot de aplicación (12a, 12b; 13a, 13b; 14a, 14b); posición ésta que es ocupada por la parte de carrocería durante la retención o parada de la carrocería (1); - Los rollos de reserva (22, 22¿, 22¿), que están siendo usados y que están dispuestos en la instalación de aplicación, están sujetados - observados los mismos en su vista en planta - al lado del dispositivo de transporte horizontal (8), estando el eje del rollo alineado de forma paralela a la dirección del transporte; en este caso, los rollos de reserva (22, 22¿, 22¿), que se están usando, están ubicados - en relación con la dirección de transporte del dispositivo de transporte horizontal (8) - en distintos puntos, concretamente en et lugar del respectivo robot de aplicación (12a, 13a, 14a), que le corresponde; - El dispositivo para trazar con unos contornos exactos las líneas de perforación en una pieza de lámina, que está siendo mantenida de forma extendida, este dispositivo, pues, se compone de una herramienta perforadora (60), que está dispuesta de forma estacionaria y a lo largo de la misma puede ser desplazada - en función del desarrollo de los contornos de las deseadas líneas de perforación - la pieza de lámina (24), que está siendo mantenida de forma extendida por el conjunto de los dos robots de aplicación ( 12a, 12b; 13a, 13b; 14a, 14b), que están situados de forma mutuamente opuesta.
Tipo: Resumen de patente/invención.
Solicitante: DAIMLER AG.
Nacionalidad solicitante: Alemania.
Dirección: MERCEDESSTRASSE 137,70327 STUTTGART.
Inventor/es: HABISREITINGER, UWE, NORDMANN, BERNHARD, WALTER, WOLFRAM.
Fecha de Publicación: .
Fecha Concesión Europea: 26 de Septiembre de 2007.
Clasificación PCT:
- B65B33/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 33/00 Embalado de objetos revestimiento de una capa que puede ser separable, p. ej. pelable (B65B 11/52 tiene prioridad). › Embalaje de grandes objetos, p. ej. máquinas completas, aviones.
Patentes similares o relacionadas:
Método de protección de superficies lacadas, del 13 de Diciembre de 2017, de NOVACEL: Método para proteger una superficie lacada o pintada con una laca o pintura, reticulable mediante polimerización, no curada, que comprende (i) laminado de una película […]
PROCEDIMIENTO PARA EL REVESTIMIENTO AUTOMATIZADO DE UN CUERPO MOLDEADO CON UNA HOJA Y USO DE CUERPOS MOLDEADOS DE ESTE TIPO., del 1 de Noviembre de 2004, de CHEMETALL GMBH: Procedimiento automático para el revestimiento sin arrugas o casi sin arrugas de cuerpos moldeados regular o irregularmente conformados o curvados con una hoja, en particular […]
PROCEDIMIENTO Y DISPOSITIVO PARA LA APLICACION DE UNA LAMINA PROTECTORA AUTOADHESIVA EN LAS CARROCERIAS., del 16 de Diciembre de 2003, de DAIMLERCHRYSLER AG: Procedimiento para la aplicación de una lámina protectora autoadhesiva en algunas partes de superficie de las carrocerías de los vehículos automóviles, […]