SISTEMA PARA LA MANIPULACIÓN DE MATERIALES Y MÉTODO QUE UTILIZA UNIDADES DE IMPULSIÓN MÓVILES AUTÓNOMAS Y BANDEJAS DE EXISTENCIAS DESPLAZABLES.
Sistema para la gestión de existencias en un almacén, que comprende:
una o varias unidades móviles de impulsión MDU (361), teniendo cada MDU (361) un enlace de comunicación acoplado a un procesador, un mecanismo de acoplamiento y una unidad de potencia acoplada a un mecanismo de impulsión configurado para desplazar la MDU (361) por el almacén en respuesta a señales de control del procesador, recibiendo la MDU (361) señales de mando con intermedio del enlace de comunicación; un ordenador configurado para transmitir una señal de petición, especificando la señal de petición un pedido de un elemento de las existencias; una serie de cápsulas móviles para existencias MIP (351), contendiendo cada MIP (351) elementos de existencias y estando configurada para su acoplamiento al mecanismo de acoplamiento de la MDU (361), acoplándose la MDU (361) con un MIP (351) para transportar la MIP (351) por el almacén como respuesta a las señales de mando, caracterizado porque: cada MDU (361) comprende una memoria que almacena coordenadas de posición para las múltiples MIP (351) y una lista de los elementos de existencias contenidos en cada una de las cápsulas móviles para existencias MIP (351), en el que cada unidad móvil de impulsión (361) está adaptada para determinar un tiempo estimado de duración para transportar una cápsula móvil para existencias MIP (351) que contiene un elemento especificado en el pedido y transmitir el tiempo estimado de duración al ordenador, y el ordenador está dispuesto para seleccionar una MDU (361) específica para complementar el pedido basándose en el tiempo de duración más corto estimado y notificando a la MDU específica (361) que ha sido seleccionada para complementar el pedido; estando dispuesta la MDU específica (361) para acudir al lugar de la MIP (351) que contiene el elemento específico de existencia; acoplarse con la MIP (351) y conducir la MIP a una estación del almacén. además:
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2004/000971.
Solicitante: KIVA SYSTEMS, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 26 RAY AVENUE BURLINGTON, MA 01803 ESTADOS UNIDOS DE AMERICA.
Inventor/es: MOUNTZ,MICHAEL,C.
Fecha de Publicación: .
Fecha Solicitud PCT: 14 de Enero de 2004.
Fecha Concesión Europea: 18 de Agosto de 2010.
Clasificación PCT:
- B65G1/137 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 1/00 Almacenamiento de objetos, individualmente o con un cierto orden, en almacenes o depósitos (combinaciones de transportadores en almacenes, tiendas o talleres, B65G 37/00; apilado de objetos B65G 57/00; sacado de objetos de pilas B65G 59/00; máquinas de carga B65G 65/02). › con disposiciones o medios de control automáticos para coger los objetos que deben ser sacados.
- G05D1/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
- G06Q10/00 G […] › G06 CALCULO; CONTEO. › G06Q METODOS O SISTEMAS DE PROCESAMIENTO DE DATOS ESPECIALMENTE ADAPTADOS PARA FINES ADMINISTRATIVOS, COMERCIALES, FINANCIEROS, DE GESTION, DE SUPERVISION O DE PRONOSTICO; METODOS O SISTEMAS ESPECIALMENTE ADAPTADOS PARA FINES ADMINISTRATIVOS, COMERCIALES, FINANCIEROS, DE GESTION, DE SUPERVISION O DE PRONOSTICO, NO PREVISTOS EN OTRO LUGAR. › Administración; Gestión.
Clasificación antigua:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
SECTOR DE LA INVENCIÓN
La presente invención se refiere de manera general al sector de la manipulación de materiales, más particularmente a sistemas y métodos para la manipulación de materiales, que utilizan unidades de impulsión móviles autónomas y bandejas de existencias desplazables.
ANTECEDENTES TÉCNICOS
La etapa de cumplimentar pedidos en el proceso de los sistemas de distribución es frecuentemente uno de los componentes de mayor coste en el desplazamiento de las existencias desde la producción hasta el consumidor final. Esto es debido al hecho de que la reunión de los elementos del pedido requiere de manera típica mucha mano de obra y tiempo al tener que desplazarse los operarios entre los lugares en los que se encuentran las existencias, manipulando manualmente los diferentes elementos. La etapa de cumplimentación del pedido comporta la selección de múltiples elementos individuales de las existencias entre un gran surtido de diferentes elementos posibles. Como contraste, las etapas anteriores a la etapa de cumplimentación del pedido en el proceso de los sistemas de distribución son en general más eficaces, puesto que manipulan existencias en operaciones a granel, tales como
el desplazamiento de una carga de camión de una sola vez,
- 2–
una plataforma llena de un determinado producto o incluso cajas completas.
Debido a estos elevados costes de mano de obra, las operaciones de cumplimentación de pedidos han sido desde hace mucho tiempo el foco de innovaciones destinadas a reducir la mano de obra. Estos desarrollos han adoptado la forma de tecnologías de selección dirigida (“pick-tolight”), lectores de código de barras inalámbricos, sistemas transportadores que desplazan los pedidos a los operadores e incluso sistemas de almacenamiento y extracción de existencias automatizados (“ASRS”) que llevan las existencias al operario. Las soluciones habituales ASRS se llaman en algunos casos carruseles o almacenadores. Un carrusel típico puede tener varios miles de bandejas de almacenamiento instaladas en una estructura rotativa que funciona de manera similar a una estantería de prendas giratoria en una instalación de lavado en seco. Otro tipo de solución conocida como clasificador es utilizado conjuntamente con equipos de almacenamiento de existencias y comprende un mecanismo de bandeja giratoria que ayuda a clasificar elementos procedentes de las existencias en sus cubetas de pedidos objetivo. Otra solución consiste en disponer zonas de estantes fijos servidos por un puente robot que se desplaza hacia adentro y hacia fuera de dichas zonas para llevar las existencias a la parte frontal del sistema de almacenamiento.
Estas soluciones han sido adoptadas por la industria de distribución por su capacidad en simplificar las
operaciones y reducir los costes operativos. No obstante
- 3–
incluso con estos sistemas frecuentemente onerosos los costes de cumplimentación de pedidos permanecen altos y los directores de los sistemas de distribución continúan buscando formas de reducir los costes operativos.
Otro inconveniente importante del conjunto actual de soluciones para la cumplimentación de pedidos es su complejidad. Estos sistemas automatizados comportan frecuentemente un complejo software de control, instalación lenta, tiempo de integración y de desarrollo, y fallan en su comportamiento fiable en periodos de tiempo largos. Las soluciones actuales deben ser controladas, ajustadas y gestionadas por expertos con conocimientos sofisticados de la forma de funcionamiento del sistema. Además, estos sistemas son frecuentemente poco flexibles con respecto a nuevos procesos que pueden ser necesarios según los cambios necesarios en una organización.
Lo que se necesita es un sistema de cumplimentación de pedidos simple de instalar, operar y mantener, y que reduzca adicionalmente los costes operativos.
El documento EP 1 251 083 da a conocer un sistema automatizado para la manipulación de mercancías en palés o plataformas. El sistema hace posible automatizar por completo las operaciones de manipulación de mercancías en palés en fábricas y centros de distribución.
El documento US 4 669 047 da a conocer un sistema de suministro de piezas de forma automática para una instalación de fabricación para facilitar piezas a estaciones de trabajo industrial en base a lo que se llama
“just in time” (“en el momento preciso”).
- 4–
El documento EP 0 458 722 da a conocer un sistema y aparato para la manipulación y desplazamiento de cajas, contenedores o similares de un lugar a otro en una fábrica
o en un almacén siguiendo las instrucciones de un ordenador. De acuerdo con un aspecto de la invención se da a conocer un sistema según la reivindicación 1. De acuerdo con otro aspecto de la invención se da a conocer un método según la reivindicación 23.
De acuerdo con otro aspecto de la invención se da a conocer un medio legible por ordenador de acuerdo con la reivindicación 36.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
La presente invención se comprenderá de manera más completa a partir de la descripción detallada siguiente y a partir de los dibujos que se acompañan que, no obstante, no se deben interpretar como limitativos de la invención a las realizaciones específicas que se han mostrado, sino a efectos explicativos y de comprensión solamente.
La figura 1 es una vista superior en perspectiva de una bandeja móvil para existencias. La figura 2A es una vista en perspectiva inferior de una bandeja móvil para existencias. La figura 2B es una vista frontal en alzado de la bandeja móvil para existencias de la figura 2A. La figura 3 es un diagrama de bloques de un sistema de alto nivel de subsistemas de bandejas.
- 5–
La figura 4A es un diagrama de bloques de un interfaz de sistema con respecto a un sistema de gestión de un almacén.
La figura 4B es un diagrama de flujo que muestra las etapas de un procedimiento de cumplimentación de pedidos utilizando bandejas móviles para existencias.
La figura 5 es una vista en planta de bandejas móviles para existencias situadas en el piso de una factoría.
La figura 6 es una vista en perspectiva de bandejas móviles para existencias situadas en el piso de una factoría.
La figura 7 es una vista en perspectiva de bandejas móviles para existencias dispuestas en múltiples niveles de piso en vertical, dentro de un espacio de una factoría.
La figura 8 es una vista en perspectiva de bandejas móviles para existencias sobre el piso de una factoría mostrando aberturas en el cierre lateral del suelo.
Las figuras 9A-9C son una vista lateral y una primera y segunda vistas en perspectiva de bandejas móviles para existencias y unidades de impulsión móviles desacoplables de acuerdo con una realización de la presente invención.
La figura 10 es una vista en planta que muestra bandejas móviles para existencias dispuestas en una rejilla celular con bandas de soporte y localizaciones de cola en el piso de una factoría de acuerdo con una realización de la presente invención.
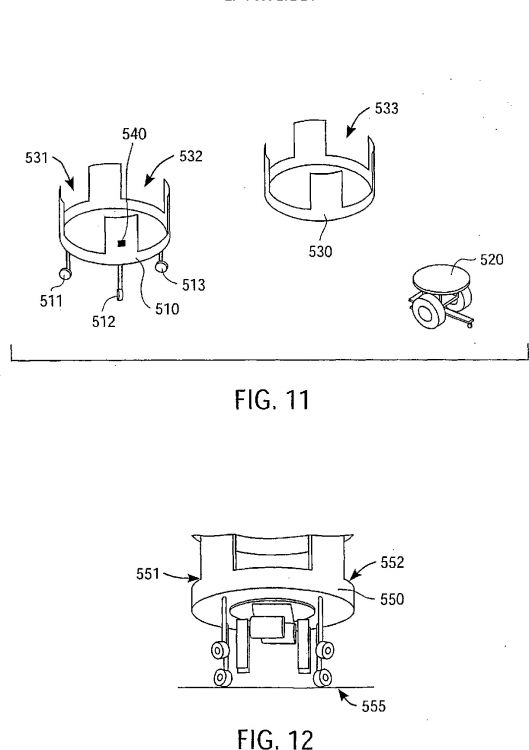
La figura 11 es una bandeja móvil para existencias de tres piezas que comprende una base de la bandeja, una
- 6–
bandeja de apilamiento y una unidad de impulsión móvil de acuerdo con una realización de la presente invención.
La figura 12 muestra una unidad de impulsión móvil acoplada a una bandeja de base de acuerdo con una realización de la presente invención.
La figura 13 es un diagrama de flujo que muestra un proceso de selección de unidades de impulsión móviles para cumplimentar un pedido de acuerdo con una realización de la presente invención.
La figura 14 es un diagrama de flujo que muestra un proceso de cumplimentación de pedidos utilizando unidades de impulsión móviles autónomas y bandejas de existencias desplazables de acuerdo con una realización de la presente invención.
La figura 15 es un diagrama de flujo que muestra un proceso de reposición de existencias utilizando unidades de impulsión móviles autónomas y bandejas móviles para existencias de acuerdo con una realización de la presente invención.
...
Reivindicaciones:
1. Sistema para la gestión de existencias en un almacén, que comprende:
una o varias unidades móviles de impulsión MDU (361), teniendo cada MDU (361) un enlace de comunicación acoplado a un procesador, un mecanismo de acoplamiento y una unidad de potencia acoplada a un mecanismo de impulsión configurado para desplazar la MDU (361) por el almacén en respuesta a señales de control del procesador, recibiendo la MDU (361) señales de mando con intermedio del enlace de comunicación;
un ordenador configurado para transmitir una señal de petición, especificando la señal de petición un pedido de un elemento de las existencias;
una serie de cápsulas móviles para existencias MIP (351), contendiendo cada MIP (351) elementos de existencias y estando configurada para su acoplamiento al mecanismo de acoplamiento de la MDU (361), acoplándose la MDU (361) con un MIP (351) para transportar la MIP (351) por el almacén como respuesta a las señales de mando, caracterizado porque:
cada MDU (361) comprende una memoria que almacena coordenadas de posición para las múltiples MIP (351) y una lista de los elementos de existencias contenidos en cada una de las cápsulas móviles para existencias MIP (351),
en el que cada unidad móvil de impulsión (361) está adaptada para determinar un tiempo estimado de duración para transportar una cápsula móvil para existencias MIP
(351) que contiene un elemento especificado en el pedido y
transmitir el tiempo estimado de duración al ordenador, y el ordenador está dispuesto para seleccionar una MDU
(361) específica para complementar el pedido basándose en el tiempo de duración más corto estimado y notificando a la MDU específica (361) que ha sido seleccionada para complementar el pedido;
estando dispuesta la MDU específica (361) para acudir
al lugar de la MIP (351) que contiene el elemento específico de existencia; acoplarse con la MIP (351) y conducir la MIP a una estación del almacén.2. Sistema, según la reivindicación 1, que comprende
además: un sistema de manipulación de material MHS (400), y una o varias estaciones de embalaje (395), de manera
que el ordenador está situado en una de las estaciones de embalaje (395), estando configurado el ordenador para transmitir las señales de mando a las MDU (361) en respuesta a una demanda de pedido emitida por el MHS (400).
3. Sistema, según la reivindicación 1, en el que las señales de control son generadas por el procesador como respuesta a señales de mando recibidas con intermedio del enlace de comunicación.
4. Sistema, según la reivindicación 2, en el que la demanda de pedido es transmitida desde el MHS (400) al ordenador (450) situado en una de las estaciones de embalaje (395).
5. Sistema, según la reivindicación 1, que comprende
además:
una o varias estaciones de embalaje (395);
un sistema de manipulación de material MHS (400) que transmite las señales de mando a las MDU (361), y
en el que la MIP (351) es facilitada a una estación de embalaje específica (395) como respuesta a las señales de mando.
6. Sistema, según la reivindicación 2, en el que cada MDU (361) transmite el tiempo de duración estimado al ordenador (450) situado en la estación de embalaje (395) con intermedio de una red inalámbrica (410) utilizando un sistema RF acoplado al enlace de comunicaciones de una o varias MDU (361).
7. Sistema, según la reivindicación 1, en el que cada una de las MDU (361) contiene un sistema de guiado que proporciona señales de posición al procesador.
8. Sistema, según la reivindicación 7, en el que el sistema de guiado comprende un sistema de posicionamiento global GPS de interiores pseudolite.
9. Sistema, según la reivindicación 8, en el que una o varias MDU (361) navegan sobre el piso de la factoría (390) utilizando información proporcionada por el GPS.
10. Sistema, según la reivindicación 1, en el que una
o varias MIQ (351) son configuradas en forma de bandejas apilables verticalmente.
11. Sistema, según la reivindicación 10, en el que una o varias de las bandejas apilables comprende una serie de cubetas.
12. Sistema, según la reivindicación 7, en el que la
serie de cápsulas móviles para existencias están
almacenadas en una cuadrícula virtual (360) sobre el piso
(390) de la factoría.
13. Sistema, según la reivindicación 1 ó 2, en el que cada una de las MDU (361) contiene un sistema de posicionamiento global GPS, navegando cada una de las MDU
(361) el almacén de forma autónoma, utilizando la información facilitada por el GPS.
14. Sistema, según la reivindicación 1 ó 2, en el que un RFID de identificación de radiofrecuencia está incorporado en cada una de las MIP (351) para identificar cada una de las MIP (351) situadas sobre el piso (390) de la factoría.
15. Sistema, según la reivindicación 2, en el que las señales de mando son transmitidas desde el MHS (400) a la estación o estaciones de comprobación (460) acopladas al MHS (400), indicando las señales de mando qué elementos específicos de existencias necesitan reposición.
16. Sistema, según la reivindicación 15, en el que un ordenador (465) de una estación de comprobación selecciona una de las MDU (361) para transportar una de las MIP (351) que contiene, como mínimo, una bandeja vacía a una estación de comprobación (460) para reponer elementos de existencia.
17. Sistema, según la reivindicación 1 ó 2, en el que la unidad o unidades MDU (361) acopladas a las MIP (351) que contienen, como mínimo, una bandeja vacía forman pistas de cola a lo largo de los lados del piso (390) de la factoría para esperar peticiones de reposición de existencias desde uno o varios ordenadores (465) de
estaciones de comprobación.
18. Sistema, según la reivindicación 17, en el que la unidad o unidades MDU (361) transportan las MIP (351) a una estación de comprobación (460) para recibir elementos de las existencias.
19. Sistema, según la reivindicación 1 ó 2, en el que las señales de mando son transmitidas a las MDU (361) con intermedio de una red inalámbrica (410).
20. Sistema, según la reivindicación 1 ó 2, que comprende además:
Una serie de estaciones de comprobación (460), un ordenador (465) en una estación de comprobación (460) que notifica a la serie de MDU (361) con intermedio de una red inalámbrica (410) cuándo se necesita una cápsula vacía para una actividad de reposición.
21. Sistema, según la reivindicación 20, en el que un ordenador (465) de una estación de comprobación selecciona una MDU (361) para transportar una cápsula móvil para existencias a una estación de comprobación (460) para reponer elementos de existencias.
22. Sistema, según la reivindicación 1 ó 2, en el que cada una de las MDU (361) comprende medios para la comunicación de informaciones con unidades MDU equivalentes
(361) utilizando una red inalámbrica (410) incluyendo, la información, información coordinada para cada una de las MDU (361) e información de elementos de existencias almacenados en cápsulas específicas, móviles, para existencias.
23. Procedimiento para la gestión de elementos de
existencias en un almacén, que comprende:
transmitir una señal de petición desde un ordenador, especificando la señal de petición un pedido para un elemento de existencias;
recibir la señal de petición por una serie de unidades móviles de impulsión MDU (361), incluyendo cada una de las MDU (361) un procesador acoplado a una memoria de acceso al azar RAM,
caracterizado por:
la memoria de acceso al azar RAM que almacena coordenadas de posición de una serie de cápsulas móviles para existencias MIP (351) y una lista de elementos de existencias contenidas en cada una de las MIP (351), respondiendo la MDU (361) a la señal de petición mediante:
determinación de una localización de una cápsula móvil para existencias MIP (351) que contiene el elemento de existencias;
determinación por cada una de las MDU (361) de un tiempo de duración estimado para transportar una MIP (351) que contiene el elemento especificado en el pedido y transmitir por cada una de las MDU (361) el tiempo de duración estimado al ordenador;
seleccionar por el ordenador una MDU específica (361) para cumplimentar el pedido basándose en el tiempo de duración estimado más corto; notificar la MDU específica
(361) que ha sido seleccionada para cumplimentar el pedido; conducir la MDU específica (361) a la localización de
la MIP (351) que contiene el elemento de existencias; acoplar la MDU específica (361) a la MIP (351);
conducir la MDU específica (361) para transportar la MIP
(351) a una estación del armazón.
24. Procedimiento, según la reivindicación 23, en el que la estación comprende una estación de embalaje (395).
25. Procedimiento, según la reivindicación 23, en el que se utiliza un procesador para calcular movimientos y mensajes de comunicación del proceso.
26. Procedimiento, según la reivindicación 23, que comprende además: almacenar la serie de MIP (351) en una cuadrícula virtual (360) sobre el piso (390) del almacén;
incorporar un chip RFID de identificación de radiofrecuencia en cada una de las MIP (351), identificando el chip RFID una única MIP (351) y los elementos de existencias contenidos en cada MIP (351).
27. Procedimiento, según la reivindicación 23, en el que la estación comprende una de una serie de estaciones de embalaje (395).
28. Procedimiento, según la reivindicación 23, en el que las MIP (351) están configuradas como bandejas apilables verticalmente, conteniendo cada bandeja uno o varios elementos de existencias.
29. Procedimiento, según la reivindicación 28, en el que cada bandeja puede estar subdividida en cubetas.
30. Procedimiento, según la reivindicación 23, que comprende además:
generar señales de posición por un sistema de guiado de la MDU (361) y navegar una trayectoria hacia la MIP
(351) utilizando las señales de posición.
31. Procedimiento, según la reivindicación 30, que comprende además:
navegar una trayectoria hacia la estación utilizando las señales de posición generadas por el sistema de guiado.
32. Procedimiento, según la reivindicación 23, que comprende además: retirar el elemento de existencias de la MIP (351) en la estación; desplazar la MDU (361) para devolver la MIP (351) a una localización de almacenamiento disponible; devolver la MIP (351) a una localización de
almacenamiento disponible en el almacén; desacoplar la MDU (361) de la MIP (351).
33. Procedimiento, según la reivindicación 23, que comprende además: desplazar la MDU (361) a una estación de comprobación (460); reponer elementos de existencias en la MIP (351) en la estación de comprobación (460); devolver la MIP (351) a una localización de
almacenamiento disponible en el almacén; desacoplar la MDU (361) de la MIP (351).
34. Procedimiento, según la reivindicación 34, que comprende además la comunicación de información entre las MDU equivalentes (361) utilizando una red inalámbrica (410).
35. Procedimiento, según la reivindicación 23, en el que la información comprende información procedente de cada
una de las MDU (361) e información acerca de elementos de existencias almacenados en MIP específicas (351).
36. Medio legible por ordenador que comprende un código para la gestión de elementos de existencias en un almacén, cuyo código puede funcionar para:
recibir una señal de petición procedente de un ordenador que especifica un pedido para un elemento de existencias en una unidad móvil de impulsión específica de una serie de unidades móviles de impulsión MDU (361) situadas en el almacén, incluyendo la MDU específica (361) un proceso de reacoplado a una memoria RAM de acceso al azar, caracterizado porque
la memoria de acceso al azar RAM almacena coordenadas de posición de una serie de cápsulas móviles de existencias MIP (351) y una lista de elementos de existencias contenidas en cada una de las MIP (351);
pudiendo funcionar además el código para:
determinar la duración de tiempo estimada para transportar una cápsula móvil para existencias MIP (351) que contiene un elemento especificado del pedido;
transmitir al ordenador el tiempo de duración estimado; recibir una notificación de que una MDU específica
(361) ha sido seleccionada por un ordenador; determinar que la MDU específica (361) es seleccionada
para cumplimentar el pedido; impulsar la MDU específica (361) al lugar de la MIP
(351) que contiene el elemento de existencias, acoplar la
MDU específica (361) con la MIP (351); y
impulsar la MDU específica (361) para transportar la MIP (351) a una estación del almacén.
37. Medio legible por ordenador, según la reivindicación 36, en el que el código puede funcionar adicionalmente para:proporcionar una señal de disponibilidad para la MDU específica (361).
38. Medio legible por ordenador, según la reivindicación 37, en el que el código puede funcionar adicionalmente para:
calcular mensajes de comunicación de movimientos y procesos.
39. Medio legible por ordenador, según la reivindicación 36, en el que el código puede funcionar además para:
generar señales de posición por un sistema de guiado de la MDU (361); y navegar una ruta hacia la MIP (351) utilizando las señales de posición.
40. Medio legible por ordenador, según la reivindicación 39, en el que el código puede funcionar además para:
navegar una trayectoria hacia una estación de embalaje
(395) utilizando las señales de posición generadas por el sistema de guiado.
41. Medio legible por ordenador, según la reivindicación 36, en el que el código puede funcionar además para:
identificar una localización del elemento de existencias dentro de las serie de las MIP (351) situadas en el almacén.
42. Medio legible por ordenador, según la reivindicación 41, en el que la localización es identificada dentro de una serie de bandejas apilables verticalmente en las MIP (351), conteniendo cada bandeja uno o varios elementos de existencias.
43. Medio legible por ordenador, según la reivindicación 36, en el que el código puede funcionar además para:almacenar la serie de MIP (351) en una cuadrícula virtual (360) sobre el piso (390) del almacén.
44. Medio legible por ordenador, según la reivindicación 36, en el que el código puede funcionar además para:
recibir una señal de identificación de radiofrecuencia RFID desde cada una de las MIP (351), identificando la señal RFID una única MIP (351) y los elementos de existencias contenidos en cada MIP (351).
45. Medio legible por ordenador, según la reivindicación 36, en el que el código puede funcionar además para:
desplazar la MDU (361) para devolver la MIP (351) a una localización de almacenamiento disponible después de retirar el elemento de existencias de la MIP (351);
devolver la MIP (351) a la localización de almacenamiento disponible en el almacén; desacoplar la MDU (361) de la MIP (351).
46. Medio legible por ordenador, según la reivindicación 36, en el que el código puede funcionar además para:
desplazar la MDU (361) a una estación de comprobación 5 (460) para reposición de existencias;
devolver la MIP (351) a una localización de almacenamiento disponible en el almacén después de la reposición de existencias;
desacoplar la MDU (361) de la MIP (351).
10 47. Medio legible por ordenador, según la reivindicación 45 ó 46, en el que el código puede funcionar además para: determinar una localización óptima de almacenamiento para la MIP (351) en la cuadrícula virtual (360).
15 48. Medio legible por ordenador, según la reivindicación 36, en el que el código puede funcionar además para:
comunicar en modalidad elemento a elemento equivalentes entre cada una de las MDU (369) para formar 20 colas y para evitar congestión de tráfico sobre el piso
(390) de la factoría.
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]