Sensor angular.
Sensor angular para detectar la posición de giro de un árbol giratorio con una rueda dentada de accionamiento (1),
unida al árbol de manera que transmite el par de giro, y con al menos una rueda dentada de medición (2, 3) accionada directamente por la misma, pudiéndose determinar a partir de la posición angular de la rueda o las ruedas dentadas de medición (2, 3) la posición angular del árbol, caracterizado por que la rueda dentada de accionamiento (1) presenta dos elementos de arrastre (4, 5) que están dispuestos uno frente a otro respecto a su circunferencia, que se extienden en dirección radial al eje de giro, que engranan en entalladuras asignadas (4', 5') de un anillo de cojinete (6) unido de manera rígida al árbol, estando configurado al menos uno de los elementos de arrastre (5) de manera elásticamente flexible en dirección circunferencial.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/055369.
Solicitante: LEOPOLD KOSTAL GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: AN DER BELLMEREI 10 58513 LUDENSCHEID ALEMANIA.
Inventor/es: RÜBENHAGEN,ARND, MOLDENHAUER,KNUT, PÜTTER,THOMAS, TRINN,ALEXANDER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01D5/04 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que utilizan palancas; que utilizan levas; que utilizan engranajes.
PDF original: ES-2525253_T3.pdf
Fragmento de la descripción:
Sensor angular
La invención se refiere a un sensor angular para detectar la posición de giro de un árbol giratorio con una rueda dentada de accionamiento, unida al árbol de manera que transmite el par de giro, y con al menos una rueda dentada de medición accionada directamente por la misma, pudiéndose determinar a partir de la posición angular de la rueda o las ruedas dentadas de medición la posición angular del árbol.
Por el documento EP 1 132 716 A1 se conoce un sensor angular de acuerdo con el preámbulo de la reivindicación 1. Las distintas realizaciones de sensor, mostradas aquí, para detectar la posición de giro de un árbol tienen en común que mediante una rueda dentada de accionamiento, unida al árbol de manera que transmite el par de giro, se accionan una o varias ruedas dentadas de medición. Las ruedas dentadas de medición están provistas de sensores de posición de giro que permiten detectar su respectiva posición de giro, mencionándose como ejemplo de tales sensores de posición de giro los sensores de Hall y los potenciómetros. En este caso, las ruedas dentadas de medición están acopladas sin holgura a la rueda dentada de accionamiento, unida de manera rígida y firme con el árbol, mediante elementos de cojinete elásticos de configuración diferente. Este tipo de acoplamiento permite compensar desviaciones estáticas y/o dinámicas del eje de giro del árbol con respecto a la posición ideal de este eje de giro. Para conseguirlo se ha de tener en cuenta, sin embargo, que los ejes de giro de las ruedas dentadas de medición se desvían de su posición ideal de manera estática y/o dinámica, lo que puede provocar errores de medición considerables si, por ejemplo, un imán permanente alojado en una rueda dentada de medición gira en relación con un sensor de Hall asignado a la misma, en vez de alrededor del eje de giro previsto, alrededor de un eje distinto a éste o si, en vez del movimiento de giro previsto solamente alrededor del eje de giro previsto, realiza un movimiento relativo adicional con respecto al mismo.
En comparación con este estado de la técnica ya conocido, el sensor angular según la presente invención tiene la ventaja de que se pueden fijar los ejes de giro de las ruedas dentadas de medición, evitándose así las desventajas mencionadas arriba.
Esto se consigue según la invención al presentar la rueda dentada de accionamiento dos elementos de arrastre que están dispuestos uno frente a otro con respecto a su circunferencia, que se extienden en dirección radial al eje de giro y que engranan en entalladuras asignadas de un anillo de cojinete unido de manera rígida al árbol, estando configurado al menos uno de los elementos de arrastre de manera elásticamente flexible en dirección circunferencial.
Esta configuración del sensor angular según la invención permite fijar el eje de giro de la rueda dentada de accionamiento, por ejemplo, mediante el apoyo en la carcasa del sensor angular, por lo que también los ejes de giro de las ruedas dentadas de medición se pueden fijar respecto a éste. Las desviaciones estáticas y/o dinámicas del eje de giro del árbol giratorio se compensan mediante el acoplamiento giratorio según la invención.
En una forma de realización ventajosa, un elemento de arrastre está configurado de manera rígida y el elemento de arrastre configurado de manera elásticamente flexible en dirección circunferencial está provisto de brazos de resorte, moldeados en forma de una sola pieza, que están en contacto con los dos cantos de la entalladura asignada del anillo de cojinete preferentemente en posición de reposo con una ligera tensión previa.
Otras configuraciones y variantes ventajosas aparecen en las reivindicaciones dependientes. Un ejemplo de realización de la invención está representado en el dibujo y se explica detalladamente a continuación por medio del dibujo.
Muestran:
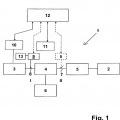
Fig. 1 una forma de realización del sensor angular, según la invención, como sensor angular de dirección
magnético para un vehículo de motor en una representación despiezada; y
Fig. 2 las ruedas dentadas y el anillo de cojinete de la Fig. 1 en una vista detallada desde el lado inferior.
En la Fig. 1 está representado un sensor angular, según la invención, en una realización como sensor angular de dirección magnético para un vehículo de motor. El árbol giratorio, cuya posición de giro es detectada por el sensor angular, es en este caso el husillo de dirección del vehículo de motor que no aparece representado en el dibujo.
Una rueda dentada de accionamiento 1 está montada de manera giratoria entre una parte inferior de carcasa 7 y una parte superior de carcasa 8 de la carcasa del sensor angular. Dos ruedas dentadas de medición 2, 3, montadas de manera giratoria en la parte superior de carcasa 8 respecto a los ejes de giro 14, 15 orientados en paralelo al eje de giro de la rueda de accionamiento 1, están engranadas en esta rueda dentada de accionamiento 1. Tanto la rueda dentada de accionamiento 1 como las ruedas dentadas de medición 2, 3 están fabricadas como piezas de plástico moldeadas por inyección a partir de plásticos adecuados en cada caso, al igual que la parte inferior y la parte
superior de carcasa 7, 8 que forman la carcasa del sensor. Las ruedas dentadas de medición 2, 3 son más pequeñas que la rueda dentada de accionamiento 1 y presentan diferentes números de dientes, de modo que las respectivas posiciones angulares de las ruedas dentadas de medición 2, 3 permiten determinar unívocamente de un modo conocido, por ejemplo, por la publicación de la solicitud de patente alemana DE 10 2006 006 359 A1, la posición angular de la rueda dentada de accionamiento 1 y, por tanto, del árbol, incluso en varias revoluciones a partir de un ángulo de batido. La detección de la posición angular de las ruedas dentadas de medición 2, 3, que es necesaria para determinar la posición de giro del árbol, se lleva a cabo mediante sensores de Hall 10, 11 que están dispuestos sobre una placa de circuitos impresos 9, alojada asimismo en la carcasa de sensor angular 7, 8, y que detectan respectivamente la orientación de los campos magnéticos generados por los imanes permanentes 12, 13 dispuestos en las ruedas dentadas de medición 2, 3. Los sensores de Hall 10, 11 se encuentran en el lado inferior, opuesto a las ruedas dentadas de medición 2, 3, de la placa de circuitos impresos 9, sobre la que están alojados además otros componentes electrónicos de un sistema electrónico de medición y evaluación del sensor angular. Un posicionamiento exacto de los sensores de Hall 10, 11 con respecto a las ruedas dentadas de medición 2, 3 y, por tanto, también con respecto a los imanes permanentes 12, 13, se lleva a cabo mediante dos taladros, cubiertos en el dibujo, de la placa de circuitos impresos, en los que engranan prolongaciones de los ejes 14, 15 que soportan las ruedas dentadas de medición. En el borde de la placa de circuitos impresos 9 está instalado un conector de enchufe 16 para hacer contacto con un contraconector de enchufe correspondiente a fin de conseguir la unión con otros dispositivos de control.
Una unión transmisora del par de giro entre la rueda dentada de accionamiento 1 y el árbol giratorio, o sea, el husillo de dirección, se lleva a cabo mediante dos elementos de arrastre 4, 5 moldeados en forma de una sola pieza en la rueda dentada de accionamiento 1. Los elementos de arrastre 4, 5 están dispuestos aquí uno frente a otro con respecto a la circunferencia de la rueda dentada de accionamiento 1 y se extienden en dirección radial al eje de giro de la rueda dentada de accionamiento 1. Los elementos de arrastre 4, 5 engranan en entalladuras asignadas 4’, 5’ de un anillo de cojinete 6 unido rígidamente al árbol, estando configurado un elemento de arrastre 4 de manera rígida. El otro elemento de arrastre 5 está provisto de brazos de resorte 5a, 5b que están moldeados en forma de una sola pieza, que son elásticamente flexibles en dirección circunferencial y que en posición de reposo están en contacto con los dos cantos de la entalladura asignada 5’ del anillo de cojinete 6 con una ligera tensión previa. El anillo de cojinete 6 presenta un vástago cilíndrico hueco 6’ que penetra desde arriba en la parte superior de carcasa 8 y sobresale hacia abajo a través de la rueda dentada de accionamiento 1. El vástago cilíndrico hueco 6’ del anillo de cojinete 6 está provisto aquí de un diámetro exterior menor que el diámetro interior de la rueda dentada de accionamiento 1, de modo que entre estos es posible una compensación de la holgura en dirección radial. Las entalladuras 4’, 5’ para engranar los elementos de arrastre 4, 5 están dispuestas... [Seguir leyendo]
Reivindicaciones:
1. Sensor angular para detectar la posición de giro de un árbol giratorio con una rueda dentada de accionamiento (1) , unida al árbol de manera que transmite el par de giro, y con al menos una rueda dentada de medición (2, 3) 5 accionada directamente por la misma, pudiéndose determinar a partir de la posición angular de la rueda o las ruedas dentadas de medición (2, 3) la posición angular del árbol, caracterizado por que la rueda dentada de accionamiento (1) presenta dos elementos de arrastre (4, 5) que están dispuestos uno frente a otro respecto a su circunferencia, que se extienden en dirección radial al eje de giro, que engranan en entalladuras asignadas (4’, 5’) de un anillo de cojinete (6) unido de manera rígida al árbol, estando configurado al menos uno de los elementos de arrastre (5) de manera elásticamente flexible en dirección circunferencial.
2. Sensor angular de acuerdo con la reivindicación 1, caracterizado por que un elemento de arrastre (4) está configurado de manera rígida y el elemento de arrastre (5) , configurado de manera elásticamente flexible en dirección circunferencial presenta brazos de resorte (5a, 5b) moldeados en forma de una sola pieza.
3. Sensor angular de acuerdo con la reivindicación 2, caracterizado por que los brazos de resorte (5a, 5b) , en posición de reposo con una ligera tensión previa, están en contacto con los dos cantos de la entalladura asignada (5’) del anillo de cojinete (6) .
4. Sensor angular de acuerdo con una de las reivindicaciones 1 a 3, caracterizado por que la rueda dentada de accionamiento (1) y la al menos una rueda dentada de medición (2, 3) están montadas con la menor holgura posible en la carcasa de sensor (7, 8) .
5. Sensor angular de acuerdo con una de las reivindicaciones 1 a 4, caracterizado por que la al menos una rueda dentada de medición (2, 3) está provista de un imán permanente (7, 8) , cuya posición angular es detectada por un sensor de campo magnético asignado (10, 11) .
6. Sensor angular de acuerdo con una de las reivindicaciones 1 a 5, caracterizado por que existe una segunda rueda dentada de medición (3) accionada directa o indirectamente por la rueda dentada de accionamiento (1) y por
que a partir de la posición angular de las dos ruedas dentadas de medición (2, 3) se puede determinar la posición angular del árbol más allá de una revolución completa.
7. Sensor angular de acuerdo con una de las reivindicaciones 1 a 6, caracterizado por que el sensor angular
configura un sensor angular de dirección en un vehículo de motor. 35
Patentes similares o relacionadas:
Dispositivo de transmisión, a un primer elemento móvil que comprende dientes, de un movimiento relativo entre un segundo y un tercer elemento de un sistema, del 1 de Mayo de 2019, de ETAT FRANCAIS REPRESENTE PAR LE DELEGUE GENERAL POUR L'ARMEMENT: Dispositivo de transmision, a un primer elemento movil que comprende dientes , de un movimiento relativo entre un segundo y un tercer elemento […]
Microsensor capaz de detectar una variación de distancia o un ciclo de variaciones de distancia entre dos puntos o zonas de una estructura en el momento de una solicitación, del 27 de Marzo de 2019, de ETAT FRANCAIS REPRESENTE PAR LE DELEGUE GENERAL POUR L'ARMEMENT: Sensor pasivo y reversible de deformaciones segun una direccion OX de una estructura exterior al sensor, especialmente durante ciclos de temperaturas o tensiones mecanicas […]
Microsensor pasivo y reversible amplificado de deformaciones, del 10 de Diciembre de 2018, de ETAT FRANCAIS REPRESENTE PAR LE DELEGUE GENERAL POUR L'ARMEMENT: Microsensor pasivo y reversible de deformaciones según una dirección longitudinal OX de una estructura particularmente durante ciclos de temperaturas o de restricciones mecánicas […]
Dispositivo de detección de ángulo de rotación absoluto de múltiples vueltas y método para la detección de ángulo de rotación absoluto, del 31 de Mayo de 2017, de Oriental Motor Co., Ltd: Un aparato de detección de ángulo de rotación de múltiples vueltas que comprende: un engranaje de árbol motor (10b) montado sobre un árbol motor (10a); un primer […]
Dispositivo para detectar ángulos de rotación absolutos de rotación múltiple y método para detectar su ángulo de rotación, del 8 de Marzo de 2017, de Oriental Motor Co., Ltd: Un dispositivo de detección de ángulo de rotación para detectar un ángulo de rotación absoluto de un primer árbol giratorio , que comprende: […]
 Dispositivo de medición para el registro del ángulo de giro absoluto de un objeto de medición rotatorio, del 12 de Noviembre de 2015, de AUMA RIESTER GMBH & CO. KG: Dispositivo de medición para el registro del ángulo de giro absoluto (φ) de un objeto de medición rotatorio, en el que una primera rueda dentada (Z1) está asociada […]
Dispositivo de medición para el registro del ángulo de giro absoluto de un objeto de medición rotatorio, del 12 de Noviembre de 2015, de AUMA RIESTER GMBH & CO. KG: Dispositivo de medición para el registro del ángulo de giro absoluto (φ) de un objeto de medición rotatorio, en el que una primera rueda dentada (Z1) está asociada […]
CAPTADOR DE CARRERA PARCIAL., del 16 de Julio de 2006, de BOSCH SYSTEMES DE FREINAGE: LA INVENCION SE REFIERE A UN CAPTADOR DE DESPLAZAMIENTO QUE SIRVE PARA MEDIR EL RECORRIDO UTIL (X1-X2) DE UNA PIEZA MOVIL SOBRE UN RECORRIDO MAS LARGO (X1-X3). […]
MECANISMO DE AJUSTE PARA UNA PIEZA AJUSTABLE DE UN MUEBLE, del 10 de Enero de 2012, de VÖLKER AG: Mecanismo de ajuste para una pieza ajustable de un mueble, particularmente para el ajuste de la altura y/o de la superficie horizontal de una cama, como por ejemplo, […]