Sistema y método para remover un anclaje óseo.
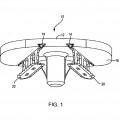
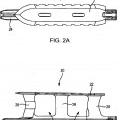
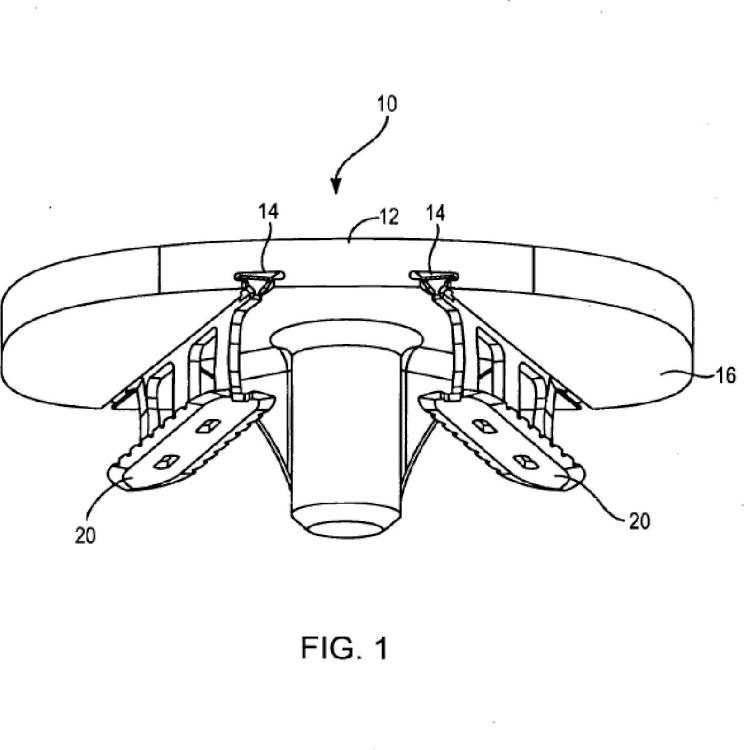
Un sistema para remover un anclaje (20) de un implante (10), el implante (10) que tiene un canal (14),
el anclaje (20) contenido al menos parcialmente dentro del canal (14), el sistema que comprende:
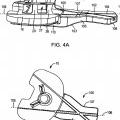
una guía de remoción del anclaje (100), en donde la guía de remoción del anclaje (100) comprende una primera superficie (102) que tiene una ranura (104); y
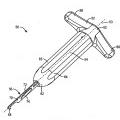
un instrumento de remoción del anclaje (50, 300), el instrumento de remoción del anclaje que comprende un cuerpo y un extremo de trabajo (56, 150, 160, 330), en donde el extremo de trabajo (56, 150, 160, 330) comprende un elemento de agarre (68) y un elemento de acoplamiento (74, 55, 162), el elemento de agarre (68) adaptado para acoplar el anclaje (20), y el elemento de acoplamiento adaptado para acoplar a la ranura(104).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2012/025110.
Solicitante: Hyun Bae, M.D.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 2811 Wilshire Blvd., Suite 850 Santa Monica, CA 90403 ESTADOS UNIDOS DE AMERICA.
Inventor/es: CREGER, CARLYLE J., BAE,Hyun, SU,EDWIN, ETHERINGTON,NEIL, ERICKSON,NATHAN, FAUTH,ANDREW R.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61F2/38 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C). › A61F 2/00 Filtros implantables en los vasos sanguíneos; Prótesis, es decir, elementos de sustitución o de reemplazo para partes del cuerpo; Dispositivos para unirlas al cuerpo; Dispositivos para proporcionar permeabilidad o para evitar que colapsen las estructuras tubulares del cuerpo, p. ej. stents (como artículos cosméticos, ver las subclases apropiadas, p. ej. pelucas o postizos, A41G 3/00, A41G 5/00, uñas artificiales A45D 31/00; prótesis dentales A61C 13/00; materiales para prótesis A61L 27/00; riñones artificiales A61M 1/14; corazones artificiales A61M 60/00). › para los codos o las rodillas.
- A61F2/46 A61F 2/00 […] › Herramientas especiales para la implantación de articulaciones artificiales (instrumentos quirúrgicos A61B 17/00).
PDF original: ES-2552777_T3.pdf
Patentes similares o relacionadas:
Sistema de extracción de instrumento quirúrgico ortopédico, del 3 de Junio de 2020, de DePuy Ireland Unlimited Company: Un sistema de extracción de instrumentos quirúrgicos que comprende: una primera herramienta de extracción que tiene un primer cuerpo que se extiende entre […]
Conjuntos de jaulas intervertebrales extensibles, del 27 de Mayo de 2020, de Robinson, James, C: Una jaula expansible para su inserción en un espacio intervertebral caracterizada porque comprende: un cuerpo de jaula que tiene una porción superior y […]
Procedimiento de fabricación de un implante, principalmente vertebral o intervertebral, e implante obtenido por este procedimiento, del 27 de Mayo de 2020, de MEDICREA INTERNATIONAL: Procedimiento de fabricación de un implante , principalmente vertebral o intervertebral, comprendiendo este implante (1, 21, […]
Método para ensamblar una prótesis ortopédica femoral, del 13 de Mayo de 2020, de DePuy Ireland Unlimited Company: Un método para ensamblar una prótesis ortopédica, el método comprendiendo: alineando una construcción de prueba femoral con un instrumento […]
Instrumental mínimamente invasivo para la entrega de un espaciador interespinoso, del 6 de Mayo de 2020, de VERTIFLEX, INC: Un instrumento de inserción para un espaciador interespinoso, que comprende: un cuerpo cilíndrico alargado que tiene un extremo proximal […]
Aparato para alinear una copa acetabular, del 29 de Abril de 2020, de DePuy Ireland Unlimited Company: Una copa acetabular que comprende: una cubierta sustancialmente hemisférica que tiene un borde , en donde un eje de copa de la copa acetabular pasa a través […]
Implante óseo, del 1 de Abril de 2020, de Attenborough Dental Laboratories Limited: Un implante para su uso en el cuerpo, caracterizándose el implante por que la conformación de al menos una parte de la superficie del implante […]
Prótesis interina de articulación, del 1 de Abril de 2020, de WALDEMAR LINK GMBH & CO. KG: Prótesis interina de articulación insertable en un hueso tubular para reemplazar a una endoprótesis de articulación que se debe explantar, en la que la […]