Recolector de frutos de un árbol.
Recolector (1) de frutos de un árbol (2), utilizable en la recolección de la aceituna,
que comprende un chasis (3) rodante con una bandeja (4) desplegable ubicable bajo el árbol (2), y que adicionalmente comprende medios de vibrado del árbol (2) destinados a producir la separación del fruto y su caída en la bandeja (4), pudiendo tener dicha bandeja (4) medios de acarreo o conducción del fruto a elementos de almacenamiento; donde el chasis (3) comprende tres ruedas tractoras (5, 6), encontrándose, al menos, dos de las mismas montadas en el chasis (3) regulablemente en altura, y disponiendo el chasis (3) de un espacio (9) destinado a alojar el tronco del árbol (2) en el interior del perímetro configurado por las ruedas (5, 6), encontrándose la bandeja (4) ubicada en el ámbito del espacio (9); y comprendiendo un grupo de accionamiento (30) controlado por mando de control remoto (34).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201431039.
Solicitante: ÁLVAREZ FERRÁNDEZ, José Justo.
Nacionalidad solicitante: España.
Inventor/es: ÁLVAREZ FERRÁNDEZ,José Justo.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A01D46/26 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01D RECOLECCION; SIEGA. › A01D 46/00 Recolección de frutas, hortalizas, lúpulo o productos similares; Dispositivos para sacudir los árboles o arbustos. › Dispositivos para sacudir los árboles o arbustos; Dispositivos para recoger los frutos utilizados con estos dispositivos de sacudida (A01D 46/28 tiene prioridad).
Fragmento de la descripción:
OBJETO DE LA INVENCIÓN
La presente invención se refiere a un recolector de frutos de un árbol, que adopta la configuración de un vehículo ligero autopropulsado y teledirigido pensado para el olivar. Su función principal es colocarse bajo un olivo para vibrarlo y recoger la aceituna que cae, transportándola y descargándola de forma autónoma.
ANTECEDENTES DE LA INVENCIÓN
Existen en la actualidad máquinas que vibran y/o recogen la aceituna de forma autónoma, habiendo de hecho desplazado a casi todos los demás medios de automatización de la recogida.
Dichas máquinas, existentes en variadas configuraciones, constan esencialmente un elemento de vibrado por medio de masas excéntricas con muchas variantes, combinado con un elemento de recogida que se parece a un paraguas invertido. Estos dos dispositivos se montan sobre un brazo telescópico articulado que se extiende desde un vehículo propiamente dicho (específico para la función o adaptado de otra) y se mantiene suspendido en voladizo bajo el árbol o se apoya bajo él. El desempeño de esta configuración es muy bueno, y su adaptación al terreno también.
Un inconveniente común a todas estas máquinas es que el elemento de vibrado y el elemento de recogida, ambos relativamente masivos por definición, han de extenderse varios metros en voladizo desde el vehículo. Esto hace inevitablemente que exista una tendencia a volcar del vehículo hacia estos elementos que se anula con una batalla generosa y/o un vehículo pesado, puesto que estos vehículos no pueden introducirse bajo las ramas de los olivos, dado que el operador, por muy bajo y atrasado que se coloque, siempre quedará por encima del nivel inferior de las ramas, que a menudo rozan en el suelo.
El tamaño y/o peso elevado de las máquinas conlleva unos inconvenientes de maniobrabilidad (no cabe entre los árboles o patina en las cuestas), y portabilidad (no puede ser remolcada por carretera), además del su mayor precio. Además, el utillaje de recogida siempre queda posicionado donde el de vibrado, siendo ambos forzosamente concéntricos.
DESCRIPCIÓN DE LA INVENCIÓN
El recolector de la invención tiene una configuración que soluciona el problema técnico descrito, ya que le permite ubicarse centrado debajo de la zona de recolección, incluso en coincidencia posicional con el árbol, reduciendo su tamaño y peso. Además implementa control remoto, lo que le permite adoptar una configuración con altura extremadamente reducida respecto al terreno, y por tanto introducirse bajo cualquier árbol, incluso de aquellos cuyas ramas están muy próximas al terreno.
Buscando estas prestaciones, se han encontrado estas otras ventajas del recolector de la invención:
1. El vehículo puede maniobrar en los espacios pequeños que quedan entre los árboles en las plantaciones más densas, (puede usarse en cualquier plantación, incluyendo las antiguas), puesto que es pequeño, ligero y capaz de pivotar sobre sí mismo, y el operador puede tener visión cómoda y directa, al ser por control remoto, de las zonas comprometidas.
2. El vehículo tiene una fracción de la potencia que necesitaría un vehículo mayor, siendo mucho más respetuoso con el medio ambiente, además de económico.
3. El vehículo tiene mejores capacidades todo terreno. Puede girar y desplazarse en cualquier inclinación, incluyendo fuertes pendientes. Puede desplazarse en terreno blando debido a la menor presión sobre el suelo. Puede afrontar terrenos muy desiguales debido a su configuración rodante con tres apoyos regulables en altura.
4. Es remolcable y fácilmente almacenable y transportable.
5. Es capaz de colocarse bajo la copa del árbol incluso cuando el tronco se halla o no se halla en el centro de ésta.
De acuerdo con la invención, el recolector es del tipo que se utilizan particularmente en la recolección de la aceituna, y que comprenden un chasis rodante con una bandeja desplegable que se ubica bajo el árbol, y que también comprende unos medios de vibrado del árbol destinados a producir la separación del fruto y su caída en la bandeja desplegable, pudiendo tener dicha bandeja desplegable medios de acarreo o conducción del fruto a elementos de almacenamiento.
La mejora de la invención, propone que el chasis comprenda tres ruedas tractoras, preferentemente dos ruedas no direccionales tractoras extremas y una rueda direccional - esto es, giratoria direccionalmente- tractora extrema opuesta, encontrándose, al menos, dos de las ruedas montadas en el chasis regulablemente en altura, y disponiendo el chasis de un espacio destinado a alojar el tronco del árbol en el interior del perímetro configurado por las ruedas, encontrándose la bandeja ubicada en el ámbito de dicho espacio, esto es, justo en la zona de caída del fruto. El recolector, además, comprende un grupo de accionamiento controlado por un mando de control remoto.
Con esta configuración, el recolector se estructura en un vehículo con únicamente tres puntos de apoyo en el terreno -el mínimo necesario- permitiendo la regulación independiente en altura de dos de ellos compensar cualquier desnivel del terreno o vaciar e fruto recogido. Además, la configuración del chasis dejando un espacio para el tronco del árbol permite al recolector estacionarse verticalmente bajo la copa para recoger los frutos, y todo ello con un tamaño sumamente pequeño. Igualmente, dado que todas las ruedas son tractoras, se permite la implementación en el grupo de accionamiento de algoritmos de control de tracción si las mismas disponen de accionamientos independientes, lo que permite al recolector mejorar sus capacidades de desplazamiento en cualquier tipo de terreno.
DESCRIPCIÓN DE LOS DIBUJOS
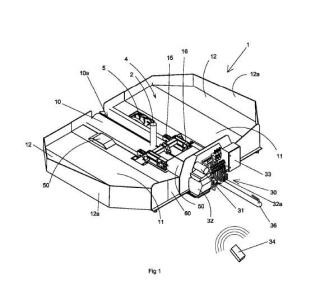
La figura 1.- Muestra una vista general del recolector de la invención con la bandeja en
posición desplegada.
La figura 2.- Muestra una vista del chasis del recolector de la invención.
La figura 3.- Muestra una secuencia de dos vistas donde el chasis mostrado en la figura 2 adopta dos posturas, la primera de ellas adaptada a un terreno horizontal y la segunda de ellas adaptada a una terreno en pendiente.
La figura 4.- Muestra una vista en detalle de la pinza vibradora del recolector de la invención en posición elevada.
La figura 5.- Muestra una vista lateral de la pinza vibradora del recolector de la invención en posición inferior.
La figura 6.- Muestra un detalle del recolector de la invención donde la pinza vibradora se encuentra actuando sobre el tronco de un árbol.
La figura 7.- Muestra una vista en alzado del recolector de la invención con la bandeja en posición desplegada.
La figura 8.- Muestra una vista en alzado del recolector de la invención con la bandeja en posición replegada y listo para ser remolcado.
REALIZACIÓN PREFERENTE DE LA INVENCIÓN
El recolector (1) de frutos del árbol (2) de la invención es del tipo que se utilizan particularmente en la recolección de la aceituna, y que comprenden un chasis (3) rodante (ver figuras 2 y 3) con una bandeja (4) (ver figuras 1, 6 y 7) desplegable que se ubica bajo el árbol (2), y que adicionalmente comprende unos medios de vibrado del árbol (2) destinados a producir la separación del fruto y su caída en la bandeja (4) desplegable, pudiendo tener dicha bandeja (4) desplegable medios de acarreo o conducción del fruto, por ejemplo una portezuela (60), a elementos de almacenamiento, no representados.
El chasis (3), como se ve en la figura 2, es rodante al comprender tres ruedas (5, 6)
tractoras, comprendiendo esta realización dos ruedas no direccionales (5) tractoras extremas y una rueda direccional (6), esto es, giratoria direccionalmente, tractora extrema opuesta; encontrándose, al menos, dos de las ruedas -en esta realización las ruedas no direccionales (5)- montadas en el chasis regulablemente en altura, de modo que se permite regular la inclinación del chasis (3) respecto de las ruedas para compensar la inclinación del terreno, como se ve en la figura 3, o para producir la salida del fruto recolectado a través de la portezuela (60).
El montaje de las ruedas no direccionales (5) regulablemente en altura se materializa en este ejemplo de la invención a través de brazos basculantes (7) independientes y respectivamente articulados a sendos brazos paralelos (8) del chasis (3) que definen entre ellos un espacio (9) abierto en forma de U destinado a alojar el tronco del árbol (2), encontrándose la bandeja (4) ubicada en el ámbito de dicho espacio (9). Al ser abierto el extremo de los brazos paralelos (8) se permite que los mismos rodeen el tronco del árbol (2), y consecuentemente también la bandeja (4).
Además, el recolector (1) comprende un grupo...
Reivindicaciones:
1.- Recolector (1) de frutos de un árbol (2), del tipo que se utilizan en la recolección de la aceituna, y que comprenden un chasis (3) rodante con una bandeja (4) desplegable que se ubica bajo el árbol (2), y que adicionalmente comprende unos medios de vibrado del árbol (2) destinados a producir la separación del fruto y su caída en la bandeja (4) desplegable, pudiendo tener dicha bandeja (4) desplegable medios de acarreo o conducción del fruto a elementos de almacenamiento; caracterizado porque el chasis (3) comprende tres ruedas tractoras (5, 6), encontrándose, al menos, dos de las mismas montadas en el chasis (3) regulablemente en altura, y disponiendo el chasis (3) de un espacio (9) destinado a alojar el tronco del árbol (2) en el interior del perímetro configurado por las ruedas (5, 6), encontrándose la bandeja (4) ubicada en el ámbito de dicho espacio (9); y comprendiendo un grupo de accionamiento (30) controlado por un mando de control remoto (34).
2.- Recolector (1) de frutos de un árbol (2) según reivindicación 1 caracterizado porque el chasis (3) comprende dos ruedas no direccionales (5) tractoras extremas y una rueda direccional (6) tractora extrema opuesta,
3.- Recolector (1) de frutos de un árbol (2) según reivindicación 2 caracterizado porque las ruedas no direccionales (5) se encuentran montadas en el chasis (3) regulablemente en altura a través de brazos basculantes (7) independientes y respectivamente articulados a sendos brazos paralelos (8) del chasis (3), entre los que se encuentra definido el espacio (9) destinado a alojar el tronco del árbol (2)
4.- Recolector (1) de frutos de un árbol (2) según reivindicación 3 caracterizado porque comprende unos primeros pistones (21) de accionamiento independiente de los brazos basculantes (7).
5.- Recolector (1) de frutos de un árbol (2) según cualquiera de las reivindicaciones anteriores caracterizado porque la bandeja (4) comprende un conjunto de planchas (10, 11, 12) de material ligero y flexible de tamaño variable que comprenden, al menos, una plancha central (10), dos planchas laterales (11) abisagradas a la plancha central (10), y dos planchas adicionales (12) abisagradas a las planchas laterales (11).
6.- Recolector (1) de frutos de un árbol (2) según reivindicación 5 caracterizado porque la plancha central (1) comprende carenados sobre las ruedas (5, 6).
7.- Recolector (1) de frutos de un árbol (2) según reivindicaciones 5 o 6 caracterizado porque las planchas adicionales (12) comprenden resaltes extremos (12a).
8.- Recolector (1) de frutos de un árbol (2) según cualquiera de las reivindicaciones 5 a 7 caracterizado porque la plancha central (10) comprende una ranura (10a) para el paso del tronco del árbol (2).
9.- Recolector (1) de frutos de un árbol (2) según cualquiera de las reivindicaciones 5 a 8 caracterizado porque comprende unos segundos pistones (22) que se encuentran relacionando el chasis (3) y las planchas laterales (11) en orden a producir su despliegue y repliegue.
10.- Recolector (1) de frutos de un árbol (2) según cualquiera de las reivindicaciones 5 a 9 caracterizado porque los medios de vibrado del árbol (2) comprenden una pinza vibradora (14) desplazable y elevable dispuesta entre los brazos paralelos (8) del chasis (3) y apoyada sobre los mismos a través de la plancha central (10); estando dicha pinza vibradora (14) destinada a prender el tronco del árbol (2).
11.- Recolector (1) de frutos de un árbol (2) según reivindicación 10 caracterizado porque la pinza vibradora (14) se encuentra montada en un carro (15) asociado al chasis (3) mediante terceros pistones (23) paralelos a los brazos paralelos (8) del mismo en orden a producir su desplazamiento longitudinal; encontrándose articulado en dicho carro (15) un elevador (16) pivotante por la acción de cuartos pistones (24), y encontrándose sustentado en dicho elevador (16) pivotante a través de tacos elásticos (17) un dedo fijo (18) de la pinza vibradora (14), y encontrándose fijado a dicho dedo fijo (18) un vibrador (19) excéntrico motorizado y articulado a dicho dedo fijo (18) un dedo móvil (20) accionado por un quinto pistón (25)
12.- Recolector (1) de frutos de un árbol (2) según cualquiera de las reivindicaciones 3 a 11 caracterizado porque el chasis (3) comprende una porción principal (27) de la que emergen los brazos paralelos (8), encontrándose montada en dicha porción principal (27) la
rueda direccional (6) a través de un actuador rotativo (28) hidráulico.
13.- Recolector (1) de frutos de un árbol (2) según cualquiera de las reivindicaciones anteriores caracterizado porque las ruedas (5, 6) se encuentran accionadas por motores hidráulicos.
14.- Recolector (1) de frutos de un árbol (2) según cualquiera de las reivindicaciones anteriores caracterizado porque el grupo de accionamiento (30) comprende, al menos, una bomba hidráulica (31), al menos, un motor de explosión (32) de accionamiento de dicha bomba hidráulica (31), una central de válvulas (32a) de reparto de la presión hidráulica, y un autómata (33) de control, asociado mediante un radioenlace al mando de control remoto (34).
15.- Recolector (1) de frutos de un árbol (2) según reivindicación 14 caracterizado porque la central de válvulas (32a) comprende electroválvulas progresivas controladas por el autómata (33).
16.- Recolector (1) de frutos de un árbol (2) según cualquiera de las reivindicaciones 14 o
caracterizado porque el autómata (33) comprende algoritmos de control independiente del accionamiento de las ruedas (5, 6).
17.- Recolector (1) de frutos de un árbol (2) según cualquiera de las reivindicaciones 14 a
16 caracterizado porque el grupo de accionamiento (30) adicionalmente comprende, al menos, un acumulador de presión (35) de reserva destinado a suplementar puntualmente la potencia hidráulica proporcionada por el motor de explosión (32).
18.- Recolector (1) de frutos de un árbol (2) según cualquiera de las reivindicaciones 12 a
17 caracterizado porque el grupo de accionamiento (30) se encuentra dispuesto en la porción principal (27) del chasis (30)
19.- Recolector (1) de frutos de un árbol (2) según cualquiera de las reivindicaciones anteriores caracterizado porque el chasis (3) comprende una lanza (36) de remolque.
20.- Recolector (1) de frutos de un árbol (2) según reivindicación 19 caracterizado porque
la lanza (36) es desmontable.
Patentes similares o relacionadas:
Contrapeso para vibradores de árboles frutales, del 17 de Junio de 2020, de MORENO MARTÍNEZ, Francisco: Contrapeso para vibradores de árboles frutales, que incorpora una masa excéntrica asociada a un eje de vibración, estando la masa excéntrica […]
MECANISMO DE VAREO DE COSECHADORA DE FRUTOS, del 9 de Junio de 2020, de MORENO MARTÍNEZ, Francisco: 1. Mecanismo de vareo de cosechadora de frutos caracterizado porque está constituido a partir de un bastidor , con medios de vinculación a la correspondiente […]
Herramienta cosechadora y rastrillo para una herramienta cosechadora, del 3 de Junio de 2020, de ANDREAS STIHL AG & CO. KG: Herramienta cosechadora con dos rastrillos montados de manera pivotante entre una posición pivotada aproximándose el uno hacia el otro y una posición […]
DISPOSITIVO PARA EL DESPLAZAMIENTO DE MANTOS EN UN PROCESO DE RECOLECCIÓN AGRÍCOLA, del 7 de Mayo de 2020, de UNIVERSIDAD DE JAEN: La invención describe un dispositivo para el desplazamiento de mantos en un proceso de recolección agrícola que comprende:un mecanismo de unión a un […]
DISPOSITIVO PARA LA RECOGIDA DE ACEITUNAS, del 30 de Abril de 2020, de FUMADÓ BAILA, Agustí: 1. Dispositivo recogedor de aceitunas, comprendiendo: - una estructura de soporte provista de un tramo central con un mástil acoplable a un vehículo […]
Dispositivo para el desplazamiento de mantos en un proceso de recolección agrícola, del 30 de Abril de 2020, de UNIVERSIDAD DE JAEN: La invención describe un dispositivo para el desplazamiento de mantos en un proceso de recolección agrícola que comprende: un mecanismo de […]
Aparatos para varear, en particular para varear aceitunas y similares, del 8 de Abril de 2020, de ZANON S.R.L.: Un aparato para varear , en particular para varear aceitunas y similares, que comprende un mango provisto, en un extremo de trabajo , con un cuerpo de soporte […]
CARPA RECOLECTORA DE FRUTOS DE DOBLE USO, del 17 de Marzo de 2020, de EMES GARRIGUES, S.L.L: 1. Carpa recolectora de frutos de doble uso que, configurada a partir de una estructura metálica plegable que comprende una plataforma central y una pluralidad […]