Procedimiento para el tendido de un puente militar.
Procedimiento para el tendido de un puente militar (1) sobre un obstáculo (10) en la zona de combate,
usando al menos un vehículo de tendido (5), incluyendo los pasos siguientes:
- carga del puente (1) sobre al menos un vehículo de tendido (5) autopropulsado, no tripulado, teledirigible,
- transporte del vehículo de tendido (5) por agua, aire, rieles y/o carretera hasta el límite de la zona de combate,
- conducción hasta la proximidad del obstáculo (10) de al menos un vehículo de tendido (5) mediante un vehículo piloto (6) tripulado,
caracterizado por los pasos:
- aproximación fina automática y autónoma del al menos un vehículo de tendido al obstáculo, apoyado por un escáner ambiental incorporado y/o escáner ambiental por láser,
- escaneado automático de la situación del terreno después de la llegada al obstáculo,
- simulación automática del proceso de tendido, respetando los datos escaneados y los valores constructivos límite especificados,
- decisión automática respecto a la realización o interrupción del proceso de tendido y ejecución de la decisión.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08008974.
Solicitante: General Dynamics European Land Systems-Germany GmbH.
Nacionalidad solicitante: Alemania.
Dirección: Barbarossastrasse 30 67655 Kaiserslautern ALEMANIA.
Inventor/es: EMRICH, LOTHAR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- E01D15/127 CONSTRUCCIONES FIJAS. › E01 CONSTRUCCION DE CARRETERAS, VIAS FERREAS O PUENTES. › E01D PUENTES (pasarelas que unen el edificio terminal y la aeronave para el embarque o el desembarque de pasajeros B64F 1/305). › E01D 15/00 Puentes móviles o transportables (disposición a bordo de buques de rampas exteriores o pasarelas B63B 27/14; rampas de carga B65G 69/28 ); Puentes flotantes. › combinados con vehículos de apoyo sobre el suelo para el transporte, manipulación o colocación de tales puentes o de sus partes.
PDF original: ES-2500215_T3.pdf
Fragmento de la descripción:
Procedimiento para el tendido de un puente militar
La invención se refiere a un procedimiento para el tendido de puentes militares por encima de un obstáculo en una zona de combate según el preámbulo de la reivindicación 1.
El tendido de puentes militares por encima de obstáculos que están bajo el fuego enemigo es un asunto dificultoso y, antes que nada, peligroso. Originariamente, los ingenieros militares debían erigir los puentes "in situ" para superar los obstáculos. Esto producía grandes pérdidas. Por este motivo, hace algunas décadas se ha desarrollado un procedimiento para el tendido de puentes de este tipo, en el cual un tanque modificado a vehículo de tendido podía llevar un puente dividido en múltiples elementos parciales hasta el borde del obstáculo y, a continuación, tender un cantlléver por encima del obstáculo. Estos puentes estaban en condiciones de superar obstáculos de hasta 28 m de anchura. El equipo de operadores podía, esencialmente, permanecer en el tanque, eventualmente debía abandonar el tanque durante corto tiempo para eliminar algún funcionamiento incorrecto.
Tales sistemas de puentes se resumen hoy día bajo el concepto general de "puentes de ataque". Debido al blindaje necesario de dichos vehículos se prescinde de sistemas para la protección activa y se reduce la protección pasiva a favor del requerimiento de carga para el puente y equipo de tendido. Contrariamente, los puentes sin acción enemiga directa son denominados "puentes tácticos" o también "puentes de apoyo". La mayoría de las veces, dichos sistemas tienen una capacidad mayor con referencia a la luz libre y, consecuentemente, un mayor peso. Por este motivo, sólo tiene sentido usar para el transporte sistemas sin protección.
Todos los puentes de ataque tienen en común que el proceso de tendido "¡n situ" debe ser activado y controlado por uno o más soldados. De esta manera, los mismos continúan estando expuestos al fuego enemigo.
Otro problema en el perfeccionamiento de puentes militares es la transportabilidad. La mayoría de las veces existen limitaciones respecto de carga, carga remolcada, peso total y dimensiones. Los vehículos blindados tienen altos requerimientos al sistema de puentes, ya que ellos mismos usan en gran medida los límites de peso y dimensiones disponibles. Por ello, los puentes fueron construidos para que en el trasporte pudieran ser plegados o enchufados telescópicamente. También para ello se desarrolló un sinnúmero de construcciones. Sin embargo, tienen en común que complican la construcción y retardan el proceso de tendido.
En el mismo sentido también son válidas estas mismas consideraciones cuando el puente es transportado por agua o por aire. También en este caso es necesario cumplir los respectivos perfiles de transporte, en el trasporte aéreo además los pesos admitidos limitados de carga y transporte.
El documento WO 2004/074 580 describe un procedimiento según el preámbulo de la reivindicación 1, en el cual un vehículo de tendido sin tripulantes es teledirigido hasta el obstáculo.
La presente invención tiene el objetivo de indicar un procedimiento para el tendido de puentes militares en el cual ningún soldado está expuesto al fuego enemigo. Complementariamente, la invención tiene el objetivo de optimizar el transporte del puente hasta el lugar de instalación.
El objetivo principal nombrado se consigue mediante un procedimiento con las características de la reivindicación 1.
La presente invención se basa en los siguientes principios:
En primer lugar, de acuerdo al riesgo de la acción enemiga, el recorrido total hasta el lugar de operaciones es dividido en tres zonas de riesgo:
Zona 1: zona de avance.
En esta zona no existe una acción enemiga directa y los vehículos se mueven en un espacio vigilado. Zona 2: zona de combate.
En esta zona se mueven solamente vehículos con protección activa y pasiva.
Zona 3: zona de instalación.
Esta zona está situada exactamente delante de las unidades enemigas y es critico incluso para vehículos blindados.
La extensión espacial de estas zonas se define, caso por caso, según puntos de vista militares.
Para el movimiento del sistema de puente en la zona de avance se carga el puente sobre un vehículo de tendido. En principio, el vehículo de tendido es autopropulsado, sin embargo es movido, inicialmente, mediante un vehículo de
transporte. Dicho vehículo de transporte es un vehículo militar, dado el caso también un vehículo civil y se puede mover sobre la carretera, sobre rieles, en el agua o en el aire. En la zona de avance, el vehículo de tendido es usado solamente como transportador y, por lo demás, es pasivo. A este respecto, los movimientos del vehículo se realizan, convencionalmente, mediante los sistemas del vehículo de transporte. En el límite con la zona de combate, el vehículo de tendido es separado del vehículo de transporte.
En este punto, un vehículo piloto asume la conducción del vehículo de tendido, cargado con el puente, en dirección al obstáculo a superar. En este proceso no existe, preferentemente, ninguna conexión mecánica entre el vehículo piloto y el vehículo de tendido. El vehículo de tendido marcha activo, o sea con potencia propia y sin tripulación. El vehículo piloto es tripulado y, preferentemente, blindado. Gracias a que el vehículo de tendido no está acoplado mecánicamente, el vehículo piloto tiene su total independencia y movilidad.
Por lo tanto, el vehículo piloto se puede parecer en la protección activa y pasiva a los vehículos de la tropa de combate o ser un vehículo de este tipo. El vehículo de tendido está conectado por medio de un sistema de guía electrónico con el vehículo piloto y sigue su movimiento de manera autónoma a una distancia apropiada (especificada) hasta la zona de instalación.
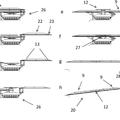
Desde aquí, el vehículo de tendido marcha de manera autónoma como vehículo robótico hasta el obstáculo. Esto es posible gracias al escáner ambiental instalado que puede incluir tanto un analizador óptico de imágenes como un escáner por láser. Llegado a este punto, mide la anchura del obstáculo y el contorno de las orillas. Con la ayuda de los datos obtenidos, el vehículo de tendido realiza, inicialmente, una simulación del proceso de tendido. Si en esta oportunidad determina que el obstáculo es demasiado ancho o las orillas demasiado empinadas, interrumpe el proceso de tendido. Caso contrario, realiza el proceso de tendido.
Debido a que en la zona de instalación real del sistema de puente no existen en la zona del obstáculo ni vehículos piloto ni personas y el vehículo de tendido es completamente no tripulado, son imposibles las falsas Interpretaciones que podrían llevar a funcionamientos incorrectos. Dado el caso, el vehículo piloto que se encuentra a distancia segura puede intervenir de manera correctiva. Tampoco es posible que se lesionen personas bajo fuego enemigo. Debido a que a bordo no se encuentran personas, tampoco es necesario que el vehículo de tendido sea poco o nada blindado. Esto beneficia la capacidad de carga, es decir se pueden transportar y tender elementos de puente grandes y pesados.
Para poder transportar estos elementos de puente grandes y pesados hasta la zona de combate, sin transgredir las especificaciones de perfiles de carretera, puente y demás, para la solución del segundo objetivo parcial el puente es dividido a lo largo, siendo cada parte de puente cargado a un vehículo de tendido propio. Si el puente debe ser transportado por carga aérea, cada vehículo de tendido con su parte de puente puede ser transportado en aviones separados.
Según un perfeccionamiento alternativo de la invención, la conducción del vehículo de tendido desde el límite de la zona de combate hasta la zona del obstáculo no se produce mediante un vehículo piloto individual sino mediante un grupo de vehículos piloto. De esta manera no se interrumpe la marcha del vehículo de tendido cuando un vehículo piloto pudiera quedar Inutilizado bajo fuego enemigo. También, varios vehículos están en condiciones de detectar más rápidamente un lugar apropiado para la superación del obstáculo. En el caso de que uno de los vehículos piloto encuentre un lugar que parece apropiado para la superación del obstáculo, el vehículo de tendido sigue a este vehículo piloto. Los vehículos piloto tienen registrado su recorrido por medio de un sistema de detección de posición y transmiten la ruta más favorable por telemetría al vehículo de tendido. Con ayuda de dichos datos y de los sistemas de registro propios, el vehículo de tendido puede encontrar, automáticamente, el obstáculo. Llegado al obstáculo, el vehículo de tendido ejecuta,... [Seguir leyendo]
Reivindicaciones:
la zona de combate, usando al
no tripulado, teledirigible,
- transporte del vehículo de tendido (5) por agua, aire, rieles y/o carretera hasta el límite de la zona de combate,
- conducción hasta la proximidad del obstáculo (10) de al menos un vehículo de tendido (5) mediante un vehículo piloto (6) tripulado,
caracterizado por los pasos:
- aproximación fina automática y autónoma del al menos un vehículo de tendido al obstáculo, apoyado por un escáner ambiental incorporado y/o escáner ambiental por láser,
- escaneado automático de la situación del terreno después de la llegada al obstáculo,
- simulación automática del proceso de tendido, respetando los datos escaneados y los valores constructivos límite especificados,
- decisión automática respecto a la realización o interrupción del proceso de tendido y ejecución de la decisión.
2. Procedimiento según la reivindicación 1, caracterizado por el paso:
- el transporte hasta el límite de la zona de combate se realiza mediante un vehículo de transporte con conductor de acuerdo con las reglas de tránsito vial.
3. Procedimiento según la reivindicación 1, caracterizado por el paso:
- el transporte al límite de la zona de combate se realiza mediante un avión de transporte (4).
4. Procedimiento según la reivindicación 1, caracterizado por el paso:
- el transporte al límite de la zona de combate se realiza mediante un lanchón remolcador.
5. Procedimiento según una de las reivindicaciones 1 a 4, caracterizado por los pasos:
- el vehículo de tendido (5) sigue a un único vehículo piloto (6, 7),
- el vehículo piloto (6, 7) encuentra el lugar de tendido ideal.
6. Procedimiento según una de las reivindicaciones 1 a 4, caracterizado por los pasos:
- el vehículo de tendido (5) sigue a un grupo de vehículos piloto,
- uno de los vehículos de tendido (5) encuentra el lugar de tendido óptimo,
- el vehículo de tendido (5) marcha al lugar de tendido óptimo, siguiendo automáticamente el perfil de movimiento registrado de dicho vehículo piloto (6, 7).
7. Procedimiento según las reivindicaciones 5 o 6, caracterizado por el paso:
- el vehículo de tendido (5) sigue el al menos un vehículo piloto (6, 7) sin conexión mecánica.
8. Procedimiento según una de las reivindicaciones 1 a 7, caracterizado por el paso:
- la aproximación fina se produce a velocidad reducida, finalmente a paso de hombre.
9. Procedimiento según una de las reivindicaciones 1 a 8, caracterizado por el paso:
- el vehículo de tendido (5) realiza, finalmente, un control del puente tendido (1).
10. Procedimiento según una de las reivindicaciones 1 a 9, caracterizado por el paso:
- interrupción de la aproximación a la zona de combate en cuanto el sistema de escaneo topográfico óptico y/o apoyado por escáner láser detecta una subida que supera la capacidad de trepada del vehículo de tendido (5).
11. Procedimiento según la reivindicación 10, caracterizado por los pasos:
- Umschalten der Umfelderkennung auf kurze Distanz,
1. Procedimiento para el tendido de un puente militar (1) sobre un obstáculo (10) en menos un vehículo de tendido (5), incluyendo los pasos siguientes:
- carga del puente (1) sobre al menos un vehículo de tendido (5) autopropulsado,
- retomado o continuación de la aproximación.
12. Procedimiento según una de las reivindicaciones 1 a 11, caracterizado por los pasos:
- interrupción de la aproximación fina al obstáculo (10) en cuanto el sistema de escaneo topográfico detecta la
posición correcta al lugar de tendido,
- realización de un escaneo fino en la posición actual,
- inicio de la simulación de tendido.
13. Procedimiento según una de las reivindicaciones 1 a 12, caracterizado por el paso:
- transporte del puente (1) dividido en dos partes longitudinales (1.1, 1.2) hasta el límite de la zona de combate.
14. Procedimiento según una de las reivindicaciones 1 a 12, caracterizado por los pasos:
- transmisión inalámbrica de los datos del sistema de escaneo topográfico a un vehículo piloto (6),
- transmisión inalámbrica de datos de instrucción del vehículo (6) al vehículo de tendido (5).
Patentes similares o relacionadas:
Puente móvil y método para erigir dicho puente móvil, del 18 de Diciembre de 2019, de Eventbridge Holding B.V: Método para erigir un puente móvil , donde un cuerpo de puente y al menos dos elementos de soporte para soportar el cuerpo de puente […]
Puente, del 27 de Noviembre de 2019, de KRAUSS-MAFFEI WEGMANN GMBH & CO. KG: Puente con al menos dos elementos de puente que presentan una zona central dotada de un carril de rodadura y al menos una zona extrema provista de rampas de […]
 Dispositivo de acoplamiento para unir dos elementos de puente, del 27 de Noviembre de 2019, de KRAUSS-MAFFEI WEGMANN GMBH & CO. KG: Dispositivo de acoplamiento para unir dos elementos de puente con al menos un elemento de acoplamiento móvil a lo largo de una dirección de acoplamiento […]
Dispositivo de acoplamiento para unir dos elementos de puente, del 27 de Noviembre de 2019, de KRAUSS-MAFFEI WEGMANN GMBH & CO. KG: Dispositivo de acoplamiento para unir dos elementos de puente con al menos un elemento de acoplamiento móvil a lo largo de una dirección de acoplamiento […]
Puente plegable transportable, del 24 de Julio de 2019, de General Dynamics European Land Systems-Bridge Systems GmbH: Puente plegable transportable, que presenta un estado de transporte plegado y un estado de tendido desplegado, comprendiendo el puente […]
Puente desmontable de soporte de vía y procedimiento para tender un puente desmontable de soporte de vía, del 9 de Enero de 2019, de KRAUSS-MAFFEI WEGMANN GMBH & CO. KG: Puente desmontable de soporte de vía con al menos un soporte de vía y un soporte de lanzamiento, caracterizado por que el soporte […]
Aparato de despliegue de puente y vehículo de transporte de puente que incorpora dicho aparato, del 26 de Septiembre de 2018, de Pearson Engineering Limited: Un aparato para transportar un puente sobre un vehículo y desplegar el puente al suelo, comprendiendo el aparato: - medios de montaje para montar el aparato […]
Procedimiento para alojar un elemento de puente desplegable y vehículo de despliegue de puentes, del 23 de Noviembre de 2016, de KRAUSS-MAFFEI WEGMANN GMBH & CO. KG: Procedimiento para alojar un elemento de puente desplegable con un vehículo de despliegue de puentes , orientándose un brazo de despliegue […]
Vehículo y dispositivo de soporte, del 15 de Junio de 2016, de KRAUSS-MAFFEI WEGMANN GMBH & CO. KG: Vehículo, en particular vehículo de tendido de puentes, con un dispositivo de soporte dotado de un escudo de apoyo móvil en vaivén entre una posición de soporte y una […]