Procedimiento y máquina para hacer descender una vía férrea.
Procedimiento de descenso controlado de una vía férrea (2), en el que se somete ésta a oscilaciones transversales con ayuda de fuerzas de impacto dinámicas y se la solicita con una sobrecarga vertical,
controlándose una medida de asentamiento (h) definidora del descenso de la vía férrea por medio de un sistema de medida (10) que explora la posición de la vía férrea y que presenta una cuerda de medida (12) que discurre en la dirección longitudinal de la máquina entre unos sitios de exploración delantero y trasero (11) que pueden rodar sobre la vía férrea (2), así como un sitio de exploración central (11) para captar el descenso de la vía férrea (2) con relación a la cuerda de medida (12), caracterizado por los pasos de procedimiento siguientes:
a) en el sitio de exploración (11) del sistema de medida (10), trasero con respecto a la dirección de trabajo (6), se capta y almacena una inclinación longitudinal (α) de la vía férrea (2) en combinación con una medición de recorrido,
b) a partir de los valores almacenados para la inclinación longitudinal (α) y la medición de recorrido se forma un perfil de altura actual (16) para una longitud de la vía férrea de al menos metros que se extiende hacia atrás desde el sitio de exploración trasero (11) con respecto a la dirección de trabajo (6), y se calcula una recta de compensación trasera (17) que se superpone a dicho perfil de altura y reproduce una posición nominal de la vía férrea,
c) se conduce analíticamente el sitio de exploración trasero (11) a lo largo de la recta de compensación trasera (17), con lo que en el sitio de exploración central (11) posicionado entre los sitios de exploración trasero y delantero (11) se obtiene un valor de compensación
- decisivo para determinar la medida de asentamiento (h)
- para la posición de la cuerda de medida (12).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/001698.
Solicitante: FRANZ PLASSER BAHNBAUMASCHINEN- INDUSTRIEGESELLSCHAFT M.B.H..
Nacionalidad solicitante: Austria.
Dirección: JOHANNESGASSE 3 1010 WIEN AUSTRIA.
Inventor/es: THEURER, JOSEF, LICHTBERGER, BERNHARD DR..
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- E01B27/20 CONSTRUCCIONES FIJAS. › E01 CONSTRUCCION DE CARRETERAS, VIAS FERREAS O PUENTES. › E01B VIAS FERREAS; HERRAMIENTAS PARA VIAS FERREAS; MAQUINAS PARA LA CONSTRUCCION DE VIAS FERREAS DE CUALQUIER TIPO (dispositivos descarriladores o para situar los vehículos en la vía, frenos de vía o dispositivos ralentizadores B61K; retirada de materia indeseable de las vías de ferrocarril, control de la vegetación, applicación de líquidos E01H). › E01B 27/00 Colocación, renovación, trabajo, limpieza o retirada del balasto con o sin trabajo correspondiente a la vía; Dispositivos "ad hoc"; Aprisionado de las traviesas. › Compactación o apisonado de los materiales del balasto portador de la vía, p. ej. imprimiendo vibraciones a la vía, por medio de vibradores de superficie (de un balasto sin vía E01B 27/02; para el apilado de las traviesas E01B 27/12).
- E01B35/08 E01B […] › E01B 35/00 Aplicaciones de los aparatos o dispositivos de medida para la construcción de vías (aparatos para locomotoras o vagones para indicar o registrar secciones de vía en mal estado B61K 9/00; medida de ángulos, de dimensiones lineales o de irregularidades en general G01B, G01C). › para la nivelación.
PDF original: ES-2379026_T3.pdf
Fragmento de la descripción:
Procedimiento y máquina para hacer descender una vía férrea.
La invención se refiere a un procedimiento y una máquina para hacer descender de forma controlada una vía férrea según las características indicadas en los respectivos preámbulos de las reivindicaciones 1 y 4.
Una máquina de esta clase denominada estabilizador de vía férrea es conocida por el documento US 5 172 637. El sistema de medida presenta tres ejes de medida que pueden rodar sobre la vía férrea y a cada uno de los cuales está asociado un péndulo transversal para captar la inclinación transversal de la vía férrea. De esta manera, se puede copiar exactamente la inclinación transversal que se presenta en la vía férrea antes de la utilización de la máquina, con lo que ésta permanece inalterada después de la utilización de la máquina.
Según los documentos GB 2 268 021 y GB 2 268 529, es conocido el recurso de disponer en combinación con una limpieza de balasto dos péndulos longitudinales sobre sendos mecanismos de rodadura para averiguar la posición real de la vía férrea antes de la retirada del balasto y restablecer esta posición después de la introducción del balasto limpiado.
El documento DE 41 02 872 A revela un procedimiento y una máquina del género expuesto según las características indicadas en los respectivos preámbulos de las reivindicaciones 1 y 4 y, por consiguiente, se considera este documento como el estado de la técnica más próximo.
El problema de la presente invención reside, pues, en la creación de un procedimiento y una máquina de la clase citada al principio con los que se mejore la posición de la vía férrea después del descenso de la misma.
Este problema se resuelve según la invención con un procedimiento de la clase genérica expuesta por medio de las características indicadas en la cláusula caracterizadora de la reivindicación 1.
El problema especial de defectos residuales presentes después de la utilización del grupo de estabilización radica en que estos defectos pueden conducir en el curso de la utilización de trabajo de la máquina a que se ejerza una influencia negativa cada vez mayor sobre el sitio de exploración trasero. Con el procedimiento según la invención es posible ahora conducir el sitio de exploración trasero del sistema de medida a lo largo de una recta de compensación virtual. Se puede impedir así de manera fiable que la precisión del sistema de medida, en unión del descenso de la vía férrea con ayuda del grupo de estabilización, sea perjudicada por defectos residuales remanentes.
El problema citado se resuelve también según la invención con una máquina de la clase genérica expuesta por medio de las características indicadas en la parte caracterizadora de la reivindicación 4.
Esta ejecución requiere únicamente un pequeño sobrecoste de construcción, sin que se tenga que variar en sí el sistema de medida.
Otras ventajas de la invención se desprenden de las reivindicaciones subordinadas y de la descripción del dibujo.
En lo que sigue se describe la invención con más detalle ayudándose de un ejemplo de realización representado en el dibujo. Muestran:
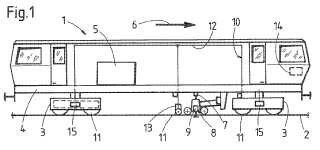
La figura 1, un alzado lateral esquemático de un estabilizador de vía férrea con un sistema de medida para un descenso controlado de dicha vía férrea, La figura 2, una representación esquemática del sistema de medida y Las figuras 3 y 4, sendas representaciones esquemáticas adicionales del perfil de altura de la vía férrea.
Una máquina 1 representada en la figura 1 para realizar un descenso controlado de una vía férrea 2 se denomina también estabilizador de vía férrea. La máquina 1 presenta un bastidor de máquina 4 apoyado sobre mecanismos de rodadura ferroviarios 3 y se puede trasladar en una dirección de trabajo 6 con ayuda de un motor 5.
Entre los mecanismos de rodadura ferroviarios 3 se encuentra un grupo de estabilización 8 regulable en altura porunos accionamientos 7 y dotado de un accionamiento de vibración 9. Éste genera oscilaciones transversales que actúan sobre la vía férrea 2 en sentido horizontal y normal a la dirección longitudinal de dicha vía y que, en combinación con una sobrecarga vertical originada por los dos accionamientos 7, tienen como consecuencia un descenso de la vía férrea.
Un sistema de medida 10 presenta - visto con respecto a la dirección de trabajo 6 - un sitio de exploración delantero, un sitio de exploración trasero y un sitio de exploración central posicionado entre éstos, designados con 11, cada uno de los cuales puede rodar sobre la vía férrea 2 para explorar la posición en altura de dicha vía. Entre los sitios de exploración delantero y trasero 11 se tienden tensadas dos cuerdas de medida 12 que discurren en la
dirección longitudinal de la máquina y cuya posición en altura con respecto a la vía férrea 2 es explorada en el sitio de exploración central 11.
Sobre cada mecanismo de rodadura ferroviaria 3 están dispuestos dos péndulos longitudinales 15 que están distanciados uno de otro en sentido normal a la dirección longitudinal de la máquina. Cada péndulo longitudinal 15 sirve para medir una inclinación longitudinal de la vía férrea 2. Para captar el trayecto recorrido se ha previsto en el sitio de exploración central 11 un medidor de recorrido 13. Un dispositivo de control 14 sirve para almacenar y procesar los valores de medida obtenidos por el sistema de medida 10.
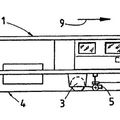
En la figura 2 se representa esquemáticamente el sistema de medida 10. El sitio de exploración delantero 11 es conducido sobre una posición provisional de la vía férrea corregida por una máquina bateadora. Con el sitio de exploración central 11 posicionado en la zona del grupo de estabilización 8 se capta un descenso de la vía férrea 2 del orden de una medida de asentamiento prefijada h con relación a la cuerda de medida 12. El sitio de exploración trasero 11 es conducido a lo largo de la posición definitiva de la vía férrea.
El péndulo longitudinal 15 trasero con respecto al grupo de estabilización 8 (véase la figura 1) o al sitio de exploración central 11 está previsto para captar la inclinación lateral α de la vía férrea 2. El dispositivo de control 14 está concebido para almacenar la inclinación longitudinal α, así como para formar un perfil de altura actual 16 y obtener por cálculo una recta de compensación 17 que se superpone al perfil de altura 16 y reproduce una posición nominal.
Tan pronto como se presenten inexactitudes en la posición provisional de la vía férrea - en la zona del sitio de exploración delantero 11 - debido a defectos residuales después del bateado inferior, estas inexactitudes, por así decirlo, son copiadas en el marco del descenso de la vía férrea efectuado por el grupo de estabilización. La problemática especial resultante de esto consiste ahora en que el sitio de exploración trasero 11 es conducido a lo largo de estos defectos copiados de la posición en altura (véase la línea de trazo grueso en la figura 2) y, por tanto, se empeora aún más la exactitud del descenso de la vía férrea.
Para eliminar este grave inconveniente se mide en puntos equidistantes (preferiblemente a distancias de 20 cm) una inclinación longitudinal α de la vía férrea 2 con el péndulo longitudinal trasero 15 (según la elección del carril de referencia, el péndulo longitudinal izquierdo o derecho 15 del mecanismo de rodadura ferroviario correspondiente 3) y, en combinación con la medición de recorrido realizada por el medidor de recorrido 13, se almacena dicha inclinación longitudinal en el dispositivo de control 14.
A partir de los valores almacenados para la inclinación longitudinal α y la medición de recorrido asociada se forma un perfil de altura actual 16 de la vía férrea 2 para una longitud de esta vía de al menos 10 metros que se extiende hacia atrás desde el sitio de exploración trasero 11 con respecto a la dirección de trabajo 6. A continuación, se calcula analíticamente la recta de compensación trasera 17 que se superpone al perfil de altura 16 y reproduce una posición nominal de la vía férrea.
El sitio de exploración trasero 11 es conducido analíticamente a lo largo de la recta de compensación virtual 17, de modo que en el sitio de exploración central 11 resulta un valor de compensación correspondiente para la posición analítica de la cuerda de medida 12 Esta posición es decisiva... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de descenso controlado de una vía férrea (2) , en el que se somete ésta a oscilaciones transversales con ayuda de fuerzas de impacto dinámicas y se la solicita con una sobrecarga vertical, controlándose una medida de asentamiento (h) definidora del descenso de la vía férrea por medio de un sistema de medida (10) que explora la posición de la vía férrea y que presenta una cuerda de medida (12) que discurre en la dirección longitudinal de la máquina entre unos sitios de exploración delantero y trasero (11) que pueden rodar sobre la vía férrea (2) , así como un sitio de exploración central (11) para captar el descenso de la vía férrea (2) con relación a la cuerda de medida (12) , caracterizado por los pasos de procedimiento siguientes:
a) en el sitio de exploración (11) del sistema de medida (10) , trasero con respecto a la dirección de trabajo (6) , se capta y almacena una inclinación longitudinal (α) de la vía férrea (2) en combinación con una medición de recorrido, b) a partir de los valores almacenados para la inclinación longitudinal (α) y la medición de recorrido se forma un perfil de altura actual (16) para una longitud de la vía férrea de al menos 10 metros que se extiende hacia atrás desde el sitio de exploración trasero (11) con respecto a la dirección de trabajo (6) , y se calcula una recta de compensación trasera (17) que se superpone a dicho perfil de altura y reproduce una posición nominal de la vía férrea, c) se conduce analíticamente el sitio de exploración trasero (11) a lo largo de la recta de compensación trasera (17) , con lo que en el sitio de exploración central (11) posicionado entre los sitios de exploración trasero y delantero (11) se obtiene un valor de compensación - decisivo para determinar la medida de asentamiento (h) - para la posición de la cuerda de medida (12) .
2. Procedimiento según la reivindicación 1, caracterizado por los pasos de procedimiento siguientes:
a) en un sitio de exploración (11) del sistema de medida (10) , delantero con respecto a la posición de trabajo (6) , se capta y almacena la inclinación longitudinal (α) de la vía férrea (2) en combinación con una medición de recorrido, b) a partir de los valores captados y almacenados para la inclinación longitudinal (α) y la medición de recorrido se forma un perfil de altura actual (18) para una longitud de la vía férrea de al menos 10 metros que se extiende hacia atrás desde el punto de exploración delantero (11) con respecto a la dirección de trabajo, y se calcula una recta de compensación delantera (19) que se superpone a este perfil de altura y reproduce una posición nominal de la vía férrea, c) se conduce analíticamente el sitio de exploración delantero (11) a lo largo de la recta de compensación delantera (19) , con lo que resulta en el sitio de exploración central (11) un valor de compensación correspondiente para la posición de la cuerda de medida (12) .
3. Procedimiento según la reivindicación 1 ó 2, caracterizado porque una diferencia entre la posición nominal y la posición real de la vía férrea (2) , obtenida en el sitio de exploración central (11) , es empleada como magnitud de regulación para variar la fuerza de impacto dinámica.
4. Máquina de descenso controlado de una vía férrea, que comprende un grupo de estabilización (8) dispuesto entre mecanismos de rodadura ferroviarios (3) , acoplable con la vía férrea (2) a través de una unión por forma y generador de fuerzas de impacto dinámicas, así como un sistema de medida (10) para captar una inclinación longitudinal (α) de la vía férrea (2) , el cual presenta unos sitios de exploración (11) delantero y trasero con respecto a una dirección de trabajo (6) y aptos para rodar cada uno de ellos sobre la vía férrea (2) , un sitio de exploración central (11) posicionado entre estos otros dos sitios y un medidor de recorrido (13) , caracterizada por las particularidades siguientes:
a) sobre un mecanismo de rodadura ferroviario (3) trasero con respecto al grupo de estabilización (8) está previsto un péndulo longitudinal (15) para captar la inclinación longitudinal (α) de la vía férrea (2) , b) un dispositivo de control (14) está concebido para almacenar la inclinación longitudinal (α) , así como para formar un perfil de altura actual (16) y determinar analíticamente una recta de compensación trasera (17) que se superpone al perfil de altura actual (16) y reproduce una posición nominal.
5. Máquina según la reivindicación 4, caracterizada porque sobre un mecanismo de rodadura ferroviario (3) delantero con respecto al grupo de estabilización (8) está previsto un péndulo longitudinal (15) para captar la inclinación longitudinal (α) de la vía férrea (2) y porque un dispositivo de control (14) está concebido para almacenar la inclinación longitudinal (α) , así como para formar un perfil de altura actual (18) y determinar analíticamente una recta de compensación delantera (19) que se superpone al perfil de altura actual (18) y reproduce una posición nominal.
6. Máquina según cualquiera de las reivindicaciones 4 ó 5, caracterizada porque en cada mecanismo de rodadura ferroviario (3) están previstos dos péndulos longitudinales (15) para captar la inclinación longitudinal (α) de la vía
férrea (2) , los cuales están distanciados uno de otro en la dirección transversal de dicha vía.
7. Máquina según cualquiera de las reivindicaciones 4, 5 ó 6, caracterizada porque una distancia (a) entre los sitios de exploración central y delantero (11) del sistema de medida (10) es más pequeña que una distancia (b) entre los sitios de exploración central y trasero (11) .
Patentes similares o relacionadas:
Máquina de construcción de vía, por ejemplo máquina bateadora, del 27 de Marzo de 2019, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Máquina de construcción de vía, por ejemplo máquina bateadora, para realizar correcciones de la posición de la vía, con un bastidor de máquina que presenta un equipo de […]
REGLA AUTOMÁTICA PARA MEDICIÓN DE LA ALINEACIÓN ENTRE CARRILES CONSECUTIVOS, del 28 de Marzo de 2017, de REDALSA, S.A: Regla automática para medición de la alineación entre carriles consecutivos, del tipo que se disponen montando la zona de unión entre dos […]
PROCEDIMIENTO DE BATEADO DE VIAS FERREAS., del 1 de Junio de 2006, de TSO: Procedimiento de bateado de vía férrea en el cual una bateadora es conducida sobre la vía a trabajar y sus órganos de bateado son controlados a partir de un sistema informatizado […]
 SOPORTE DE MEDIDOR DE NIVEL PARA VIA FERROVIARIA, del 1 de Diciembre de 2008, de ADMINISTRADOR DE INFRAESTRUCTURAS FERROVIARIAS (ADIF): 1. Soporte de medidor de nivel para vía ferroviaria, que está previsto para medir la altura y distancia de una vía respecto a un piquete; […]
SOPORTE DE MEDIDOR DE NIVEL PARA VIA FERROVIARIA, del 1 de Diciembre de 2008, de ADMINISTRADOR DE INFRAESTRUCTURAS FERROVIARIAS (ADIF): 1. Soporte de medidor de nivel para vía ferroviaria, que está previsto para medir la altura y distancia de una vía respecto a un piquete; […]
 PROCEDIMIENTO PARA EXPLORAR UN PERFIL DE UNA BANCADA, del 16 de Noviembre de 2007, de FRANZ PLASSER BAHNBAUMASCHINEN- INDUSTRIEGESELLSCHAFT M.B.H.: Procedimiento para explorar sin contacto un perfil de una bancada de balasto de una vía que discurre perpendicularmente a una dirección longitudinal de dicha vía, […]
PROCEDIMIENTO PARA EXPLORAR UN PERFIL DE UNA BANCADA, del 16 de Noviembre de 2007, de FRANZ PLASSER BAHNBAUMASCHINEN- INDUSTRIEGESELLSCHAFT M.B.H.: Procedimiento para explorar sin contacto un perfil de una bancada de balasto de una vía que discurre perpendicularmente a una dirección longitudinal de dicha vía, […]
Máquina bateadora y procedimiento para realizar una corrección de la posición de una vía férrea, del 26 de Febrero de 2020, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Procedimiento para realizar una corrección de la posición de una vía férrea con una máquina dotada de un grupo bateador , un grupo elevador-alineador […]
Máquina con conjunto de estabilización y procedimiento de medición, del 23 de Octubre de 2019, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Máquina con un bastidor de máquina desplazable por medio de mecanismo de traslación ferroviarios sobre carriles de una vía y con […]
Grupo de bateo para máquinas de mantenimiento ferroviario con capacidad de batear el balasto bajo las traviesas de la vía, tanto las simples como las dobles, del 2 de Febrero de 2018, de IBÁÑEZ LATORRE, José Antonio: Grupo de bateo para máquinas de mantenimiento ferroviario con capacidad de batear el balasto bajo las traviesas de la vía, simple y doble, que comprende […]