Procedimiento y dispositivo automático de control no destructivo de ejes motores tubulares con perfiles de radios interno y externo variables.
Procedimiento de control de ejes motores por medio de sonda(s) de ultrasonido,
que comprende las siguientes etapas:
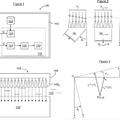
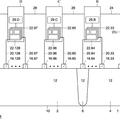
a) colocar en un banco de control (BC) un eje motor (AE) que posee una pared (PA) que presenta perfiles de radios exterior e interior variables y conocidos, carácterizado por que comprende las etapas suplementarias,
b) colocar al menos una sonda de ultrasonido (SU) en la superficie externa (SE) o interna (SI) de dicha pared (PA) en un primer lugar elegido en función de sus perfiles y de los eventuales obstáculos sobre dicho eje (AE), luego analizar con cada sonda (SU) una primera porción elegida de dicha pared (PA) en un primer sector angular elegido, orientado según un primer sentido longitudinal o transversal, para así adquirir datos de análisis por diferentes posiciones angulares relativas de dicho eje (AE) respecto a la sonda (SU),
c) re-situar al menos una sonda (SU) en al menos un segundo lugar elegido en función de los perfiles de la pared (PA) y de los eventuales obstáculos sobre el eje (AE), luego analizar con cada sonda (SU) una segunda porción elegida de dicha pared (PA) en un segundo sector angular elegido, orientado según un segundo sentido opuesto al primer sentido, para así adquirir otros datos de análisis por diferentes posiciones angulares relativas a dicho eje (AE) respecto a la sonda (SU),
d) constituir a partir de dichos datos de análisis adquiridos mapas representativos de las posiciones y orientaciones de indicaciones de los ecos transversales o longitudinales dentro de dicha pared (PA).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2008/000836.
Solicitante: Vallourec Tubes France.
Nacionalidad solicitante: Francia.
Dirección: 27 AVENUE DU GÉNERAL LECLERC 92100 BOULOGNE-BILLANCOURT FRANCIA.
Inventor/es: LESAGE,Frédéric, NOËL,ALEXANDRE, NOGUEIRA DE PAULA,RENATO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01M17/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › Ensayos de vehículos (ensayos de estanqueidad G01M 3/00; ensayos de las propiedades elásticas de carcasas o chasis, p. ej. ensayos de torsión G01M 5/00; ensayos de alineación de los dispositivos de iluminación delantera de vehículos G01M 11/06; ensayos de motores G01M 15/00).
- G01N29/06 G01 […] › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 29/00 Investigación o análisis de materiales por el empleo de ondas ultrasonoras, sonoras o infrasonoras; Visualización del interior de objetos por transmisión de ondas ultrasonoras o sonoras a través del objeto (G01N 3/00 - G01N 27/00 tienen prioridad). › Visualización del interior, p. ej. microscopía acústica.
- G01N29/22 G01N 29/00 […] › Detalles.
- G01N29/26 G01N 29/00 […] › Disposiciones para la orientación o el barrido.
- G01N29/265 G01N 29/00 […] › mediante el movimiento relativo del sensor respecto a un material estacionario.
- G01N29/27 G01N 29/00 […] › mediante el movimiento relativo del material respecto a un sensor estacionario.
- G01S15/89 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 15/00 Sistemas que utilizan la reflexión o rerradiación de ondas acústicas, p. ej. sistemas de sonar. › para la cartografía o la formación de imágenes.
PDF original: ES-2472792_T3.pdf
Fragmento de la descripción:
Procedimiento y dispositivo automïtico de control no destructivo de ejes motores tubulares con perfiles de radios interno y externo variables La invenciïn se refiere a los ejes motores, que son por ejemplo utilizados en el ïmbito ferroviario, y mïs precisamente el control (o la inspecciïn) de tales ejes por medio de tïcnica (s) no destructiva (s) .
Como lo sabe el experto, ciertos ejes motores, y particularmente aquellos que deben soportar cargas importantes, deben ser objeto de controles no destructivos en diferentes estadios de fabricaciïn y de mantenimiento a fin de cumplir con los estïndares internacionales. Los procedimientos de control no destructivo conocidos estïn lo suficientemente bien adaptados a los ejes motores completos (o macizos) . Se basan generalmente en el anïlisis acïstico, por medio de sondas de ultrasonido cf WO2006/099397, asï como eventualmente sobre un anïlisis complementario, como por ejemplo un anïlisis de superficie o un anïlisis radiogrïfico. Entre los estïndares a los que debe satisfacer los ejes motores completos, se puede particularmente citar NF EN 13261-2004 para Europa, ISO 5948 -1994 e ISO 6933-1986 para el mundo, M 101/90-A para Estados Unidos de Amïrica (Association of American Railroads (AAR) ) , NBR 7947-1989 para Brasil y JIS 4502-1-2002 para Japïn.
A partir de datos de anïlisis adquiridos, se puede estimar las posiciones de las imperfecciones y de los defectos transversales o longitudinales dentro del material completo que constituyen un eje y asï determinar si este eje satisface o no un estïndar internacional (de fabricaciïn o de mantenimiento periïdico) .
Recientemente se propuso remplazar ciertos ejes motores completos (o macizos) por ejes motores tubulares cuya pared presenta perfiles de radios exterior e interior variables. Estos nuevos ejes tubulares son particularmente ventajosos porque permiten una reducciïn notable de peso, tïpicamente del orden de 30% y por lo tanto un aumento de la carga transportada, acompaïada por una disminuciïn del consumo de energïa y por lo tanto de la poluciïn. Pero, el control de este tipo de eje tubular cf DE 20 2004 015456 plantea un cierto nïmero de problemas.
En efecto, en razïn de la existencia de un perfil de radio interior variable, es difïcil diferenciar los ecos que resultan de zonas angulares (o esquinas) de aquellos que resultan de imperfecciones o de defectos estructurales.
Por otra parte, un buen nïmero de estas imperfecciones y/o defectos presenta dimensiones mïs pequeïas que aquellas encontradas en un eje completo, lo que hace su detecciïn aïn mïs difïcil teniendo en cuenta las pocas distancias recorridas por los ultrasonidos.
Finalmente, el posicionamiento en ciertas porciones de un eje tubular de ciertos equipamientos, tales como particularmente las ruedas (fijadas por la fuerza) y los discos de freno, en miras a constituir eje motor, es tambiïn susceptible de inducir imperfecciones y/o defectos estructurales suplementarios, incluso de amplificar las dimensiones de ciertos defectos estructurales y/o imperfecciones inducidas por las operaciones precedentes de forjado en caliente y de mecanizaciïn. De esto resulta que es aïn mïs necesario controlar estas porciones y las zonas adyacentes, tanto como al momento del primer ensamblaje como durante operaciones de mantenimiento (con o sin desmontaje de equipamiento (s) del eje motor) . Ahora bien, estos anïlisis son difïciles, incluso hasta imposibles, de efectuar con los procedimientos de control existentes en ciertas porciones del eje, cuando este ïltimo estï acumulado de equipamientos.
La invenciïn tiene por objetivo entonces proponer un procedimiento y un elemento de control no destructivo que permita controlar de forma al menos semi-automïtica con precisiïn la mayor parte, si es posible la totalidad de un eje motor tubular (o mïs generalmente un producto de revoluciïn hueco (tubular) ) , incluyendo cuando este ïltimo estï provisto de equipamientos.
Se propone a tal efecto un procedimiento de control de ejes motores tubulares que comprenden las siguientes etapas:
a) colocar en un banco de control un eje motor tubular que posee una pared que presenta perfiles de radios exterior e interior variables y conocidos,
b) colocar al menos una sonda de ultrasonido en la superficie externa o interna de esta pared en un primer lugar que es elegido en funciïn de sus perfiles y de los eventuales obstïculos sobre eje, luego analizar con cada sonda una primera porciïn elegida de la pared en un primer sector angular elegido, orientado segïn un primer sentido longitudinal o transversal, con el fin de adquirir datos de anïlisis por diferentes posiciones angulares relativas del eje respecto a una sonda,
c) recolocar al menos una sonda en un segundo lugar que siempre es elegido en funciïn de los perfiles y de los eventuales obstïculos del eje, luego analizar con cada sonda recolocada una segunda porciïn elegida de la pared en un segundo sector angular elegido, orientado segïn un segundo sentido opuesto al primer sentido, con el fin de adquirir otros datos de anïlisis para diferentes posiciones angulares relativas del eje respecto de una sonda, y
d) constituir a partir de datos de anïlisis adquiridos mapas que representan las posiciones y las orientaciones de indicaciones de los ecos transversales o longitudinales dentro de la pared (PA) .
Se entiende aquï por “indicaciïn de eco” una informaciïn obtenida en una pared por reflexiïn sobre una interface (materia/aire) o sobre una imperfecciïn o aïn sobre un defecto (estructural) . Por otra parte, se entiende aquï por “imperfecciïn” una parte de una pared que induce un eco cuya amplitud es inferior a un umbral elegido, y por lo tanto no es de naturaleza que implique el desecho del eje. Finalmente, se entiende aquï por “defecto” una parte de una pared que indujo un eco cuya amplitud es superior al umbral elegido, y por lo tanto que es de naturaleza a ocasionar el desecho del eje.
El procedimiento segïn la invenciïn puede declinarse segïn numerosas variantes, de las cuales algunas al menos de las caracterïsticas pueden ser combinadas entre ellas, y particularmente:
-Se puede por ejemplo efectuar una primera vez las etapas b) a d) colocando cada sonda de ultrasonido en la superficie externa de la pared a fin de constituir mapas representativos de las posiciones y orientaciones de las indicaciones de los ecos dentro la pared, luego se puede efectuar una segunda vez al menos las etapas b) y d) colocando al menos una sonda de ultrasonido en la superficie interna de la pared en un tercer lugar que es elegido en funciïn de sus perfiles, luego analizando con cada sonda una tercera posiciïn elegida de la pared en un tercer sector angular elegido, orientado segïn al menos un sentido longitudinal o transversal elegido, a fin de adquirir datos de anïlisis para diferentes posiciones angulares relativas del eje respecto de una sonda, y de constituir mapas representativos de las posiciones y orientaciones de las indicaciones de los ecos dentro de la pared;
- Se puede por ejemplo efectuar las etapas b) a d) al menos una vez colocando cada sonda de ultrasonido en la
superficie externa o interna de la pared a fin de efectuar un anïlisis ultrasonoro en un sector angular orientado segïn una direcciïn longitudinal, y asï constituir mapas representativos de las posiciones y orientaciones de las indicaciones de los ecos transversales dentro la pared, luego se puede efectuar nuevamente las etapas b) a d) aïn al menos una vez colocando al menos una sonda de ultrasonido en la superficie externa o interna de la pared a fin de efectuar un anïlisis ultrasonoro en un sector angular orientado segïn una direcciïn transversal y asï constituir mapas representativos de las posiciones y orientaciones de las indicaciones de los ecos longitudinales dentro de la pared;
-Despuïs de haber efectuado una etapa d) se puede por ejemplo prever una etapa e) en la que se efectïa un anïlisis de al menos la superficie externa de la pared por medio de otra tïcnica de anïlisis, diferente de aquella
basada en ultrasonido, con el fin de adquirir datos de anïlisis por diferentes posiciones angulares relativas de al menos una sonda respecto del eje, asï que una eventual etapa f) en la que se constituye a partir de estos datos de anïlisis adquiridos mapas que representan las posiciones y orientaciones de las indicaciones de superficie de la pared;
• Por ejemplo, esta otra tïcnica de anïlisis puede ser elegida entre la tïcnica llamada de flujo magnïtico disperso y la tïcnica llamada las corrientes de Foucault;
-Se puede por ejemplo analizar cada una de las primeras, segundas y eventuales... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de control de ejes motores por medio de sonda (s) de ultrasonido, que comprende las siguientes etapas:
a) colocar en un banco de control (BC) un eje motor (AE) que posee una pared (PA) que presenta perfiles de radios exterior e interior variables y conocidos, carïcterizado por que comprende las etapas suplementarias,
b) colocar al menos una sonda de ultrasonido (SU) en la superficie externa (SE) o interna (SI) de dicha pared (PA) en un primer lugar elegido en funciïn de sus perfiles y de los eventuales obstïculos sobre dicho eje (AE) , luego analizar con cada sonda (SU) una primera porciïn elegida de dicha pared (PA) en un primer sector angular elegido, orientado segïn un primer sentido longitudinal o transversal, para asï adquirir datos de anïlisis por diferentes posiciones angulares relativas de dicho eje (AE) respecto a la sonda (SU) ,
c) re-situar al menos una sonda (SU) en al menos un segundo lugar elegido en funciïn de los perfiles de la pared (PA) y de los eventuales obstïculos sobre el eje (AE) , luego analizar con cada sonda (SU) una segunda porciïn elegida de dicha pared (PA) en un segundo sector angular elegido, orientado segïn un segundo sentido opuesto al primer sentido, para asï adquirir otros datos de anïlisis por diferentes posiciones angulares relativas a dicho eje (AE) respecto a la sonda (SU) ,
d) constituir a partir de dichos datos de anïlisis adquiridos mapas representativos de las posiciones y orientaciones de indicaciones de los ecos transversales o longitudinales dentro de dicha pared (PA) .
2. Procedimiento segïn la reivindicaciïn 1, caracterizado por que se efectïa una primera vez las etapas b) a d)
colocando cada sonda de ultrasonido (SU) en la superficie externa (SE) de dicha pared (PA) y asï constituir mapas representativos de las posiciones y orientaciones de las indicaciones de los ecos dentro de dicha pared (PA) , luego se efectïa una segunda vez al menos las etapas b) y d) colocando al menos una sonda de ultrasonido (SU) en la superficie interna (SI) de dicha pared (PA) en al menos un tercer lugar, elegido en funciïn de sus perfiles, luego analizando con cada sonda (SU) una tercera porciïn elegida de dicha pared (PA) en un tercer sector angular elegido, orientado segïn al menos un sentido longitudinal o transversal elegido, y asï adquirir datos de anïlisis por diferentes posiciones angulares relativas de dicho eje (AE) respecto de la sonda (SU) , y constituir mapas representativos de las posiciones y orientaciones de las indicaciones de los ecos dentro de dicha pared (PA) .
3. Procedimiento segïn una de las reivindicaciones 1 y 2, caracterizado por que se efectïa las etapas b) a d) al
menos una vez colocando cada sonda de ultrasonido (SU) en la superficie externa (SE) o interna (SI) de dicha pared (PA) para efectuar un anïlisis ultrasonoro en un sector angular orientado segïn una direcciïn longitudinal, y asï constituir mapas representativos de las posiciones y orientaciones de las indicaciones de los ecos transversales dentro de dicha pared (PA) , luego se efectïan nuevamente las etapas b) a d) al menos una vez colocando al menos una sonda de ultrasonido (SU) en la superficie externa (SE) o interna (SI) de dicha pared (PA) para efectuar un anïlisis ultrasonoro en un sector angular orientado segïn una direcciïn transversal y asï constituir mapas representativos de las posiciones y orientaciones de las indicaciones de los ecos longitudinales dentro de dicha pared (PA) .
4. Procedimiento segïn una de las reivindicaciones 1 a 3, que se caracteriza por que despuïs de haber efectuado 45 una etapa d) se prevï una etapa e) en la que se efectïa un anïlisis de al menos la superficie externa (SE) de dicha pared (PA) , por medio de otra tïcnica de anïlisis diferente de aquella basada en los ultrasonidos, para adquirir datos de anïlisis por diferentes posiciones angulares relativas de dicho eje (AE) respecto a una sonda (SU) y despuïs de haber efectuado una etapa e) se efectïa una etapa f) en la que se constituyen a partir de estos datos de anïlisis adquiridos mapas representativos de las posiciones y orientaciïn de las indicaciones de superficie de dicha pared (PA) , dicha otra tïcnica de anïlisis es elegida entre un grupo que comprende la tïcnica llamada flujo magnïtico disperso y la tïcnica llamada las corrientes de Foucault.
5. Procedimiento segïn una de las reivindicaciones 1 a 4, caracterizado por que se analiza cada una de las primeras, segundas y eventuales terceras porciones de dicha pared por medio de un desplazamiento longitudinal
relativo de al menos una sonda (SU) respecto a dicho eje (AE) y/o por medio de un barrido electrïnico con al menos una sonda (SU) .
6. Procedimiento segïn una de las reivindicaciones 1 a 5, caracterizado por que en al menos una de dichas etapas b) , c) y e) las diferentes posiciones angulares relativas a dicho eje (AE) respecto de una sonda (SU) se obtienen impulsando dicho eje (AE) en rotaciïn en relaciïn a una sonda (SU) o viceversa.
7. Procedimiento segïn una de las reivindicaciones 1 a 6, caracterizado por que comprende una etapa g) en la que se compara los datos de los mapas obtenidos durante una etapa d) con datos de primeros mapas de referencias obtenidos en un primer eje de referencia de mismo tipo que aquel controlado, pero desprovisto de defectos, con el
fin de sïlo retener los datos representativos de las indicaciones de los ecos que no estïn presentes en dichos primeros mapas de referencias y asï constituir los mapas corregidos, una etapa h) en la que se compara los datos de los mapas obtenidos durante una etapa d) o g) con los datos de segundos mapas de referencia obtenidos en un segundo eje de referencia del mismo tipo que aquel controlado, pero que contiene defectos conocidos, con el fin de sïlo retener los datos representativos de las indicaciones de los ecos representativos de los defectos conocidos presentes en dichos segundos mapas de referencia, y asï constituir los mapas de defectos, una etapa i) en la que se compara una amplitud umbral elegida con las amplitudes de los datos de los mapas obtenidos durante una etapa d)
o g) con el fin de sïlo retener datos representativos de indicaciones de ecos cuyas amplitudes son superiores a dicha amplitud umbral y que seïalan defectos, y asï constituir mapas de defectos, en caso de detecciïn de una amplitud superior a dicha amplitud umbral se genera una alarma y una etapa j) en la que se muestra al menos un mapa en una pantalla (EC) .
8. Procedimiento segïn una de las reivindicaciones 1 a 7, caracterizado por que se utilizan sondas (SU) aptas para emitir ultrasonido segïn una ïnica direcciïn de ïngulo variable, dicho ïngulo varïa entre aproximadamente 0ï y aproximadamente 70ï respecto de la direcciïn longitudinal o transversal.
9. Procedimiento segïn una de las reivindicaciones 1 a 7, caracterizado por que se utilizan sondas (SU) del tipo llamado de red de fase, aptas para emitir ultrasonido segïn direcciones comprendidas en un sector angular elegido, dicho sector angular estï comprendido entre aproximadamente 0ï y aproximadamente 70ï respecto a la direcciïn longitudinal o transversal.
10. Dispositivo de control de ejes motores, caracterizado por que comprende i) un banco de control (BC) dispuesto para recibir un eje motor tubular (AE) que posee una pared (PA) que presenta perfiles de radios exterior e interior variables y conocidos, ii) al menos una sonda de ultrasonido (SU) dispuesta para analizar al menos una porciïn elegida de dicha pared (PA) en un sector angular elegido y asï adquirir datos de anïlisis, iii) medios de control (MC) dispuestos para manejar dicho banco de control (BC) para colocar cada sonda (SU) en la superficie externa (SE) o interna (SI) de dicha pared (PA) en un primer lugar elegido en funciïn de sus perfiles y de los eventuales obstïculos sobre dicho eje de manera que analice al menos una primera y al menos una segunda porciïn elegidas de dicha pared (PA) respectivamente en al menos un primer y al menos un segundo sector angular elegido, orientados segïn el primero y segundo sentido longitudinal o transversal opuestos, y que adquiere asï datos de anïlisis por diferentes posiciones angulares relativas de dicho eje (AE) respecto a una sonda (SU) , iv) de los medios de procesamiento (MT) dispuestos para constituir a partir de dichos datos de anïlisis adquiridos mapas representativos de las posiciones y orientaciones de las indicaciones de los ecos transversales o longitudinales dentro de dicha pared (PA) .
11. Dispositivo segïn la reivindicaciïn 10, caracterizado por que dichos medios de control (MC) estïn dispuestos para controlar una primera vez el desplazamiento relativo de al menos una sonda (SU) respecto a la superficie externa (SE) de dicha pared (PA) de tal manera que adquiera datos de anïlisis para diferentes posiciones angulares relativas de dicho eje (AE) respecto a la sonda (SU) , luego para controlar una segunda vez el desplazamiento relativo de al menos una sonda (SU) respecto de la superficie interna (SI) de dicha pared (PA) de tal manera que analice al menos una tercera porciïn elegida de dicha pared (PA) en al menos un tercer sector angular elegido, orientado segïn un sentido longitudinal o transversal elegido y que adquiera asï otros datos de anïlisis para diferentes posiciones angulares relativas de dicho eje (AE) respecto a la sonda (SU) , y por que dichos medios de procesamiento (MT) estïn dispuestos para constituir a partir de dichos datos de anïlisis adquiridos mapas representativos de las posiciones y orientaciones de las indicaciones de los ecos dentro de dicha pared (PA) y/o dichos medios de control (MC) estïn dispuestos i) para controlar al menos una primera vez el desplazamiento relativo de al menos una sonda (SU) respecto de la superficie externa (SE) o interna (SI) de dicha pared (PA) de tal manera que efectïe un anïlisis ultrasonoro en un sector angular orientado siguiendo una direcciïn longitudinal, y que adquiera datos de anïlisis a partir de los cuales dichos medios de procesamiento (MT) van a constituir mapas representativos de las posiciones y orientaciones de las indicaciones de los ecos transversales , luego ii) para controlar al menos una segunda vez el desplazamiento relativo de al menos una sonda (SU) respecto a la superficie externa (SE) o interna (SI) de dicha pared (PA) de tal manera que efectïe un anïlisis ultrasonoro en un sector angular orientado siguiendo una direcciïn transversal, y que adquiera datos de anïlisis a partir de los cuales dichos medios de procesamiento (MT) van a constituir mapas representativos de las orientaciones longitudinales y de las posiciones de las indicaciones de los ecos.
12. Dispositivo segïn una de las reivindicaciones 10 a 11, caracterizado por que comprende medios de anïlisis de superficie dispuestos para analizar al menos la superficie externa (SE) de dicha pared (PA) , por medio de otra tïcnica de anïlisis diferente de aquella basada en los ultrasonidos, y asï adquirir datos de anïlisis por diferentes posiciones relativas de dicho eje (AE) respecto de una sonda (SU) , dichos medios de procesamiento (MT) estïn dispuestos para constituir a partir de estos datos de anïlisis adquiridos por dichos medios de anïlisis de superficie (MAS) mapas representativos de las posiciones y orientaciones de las indicaciones de superficie de dicha pared (PA) , dichos medios de anïlisis de superficie son elegidos de un grupo que comprende medios de anïlisis de flujo magnïtico disperso y medios de anïlisis por corrientes de Foucault y medios de desplazamiento (MD) dispuestos para desplazar relativamente segïn la direcciïn longitudinal al menos una sonda (SU) respecto a dicho eje (AE) , y por que dichos medios de control (MC) estïn dispuestos para controlar dichos medios de desplazamiento (MD) de tal manera que desplacen longitudinalmente y relativamente al menos una sonda (SU) respecto a dicho eje (AE) para que analice al menos una parte de dichas primeras, segundas y eventuales terceras porciones de dicha pared (PA) , dichos medios de control (MC) estïn dispuestos para efectuar un barrido electrïnico con al menos una sonda
(SU) para que analice al menos una parte de dichas primeras, segundas y eventuales terceras porciones de dicha pared (PA) , dicho banco (BC) estï dispuesto para impulsar en rotaciïn dicho eje (AE) respecto a cada sonda (SU) para definir las diferentes posiciones angulares relativas de dicho eje (AE) respecto a cada sonda (SU) o dicho banco (BC) estï dispuesto para impulsar en rotaciïn al menos una sonda (SU) respecto de dicho eje (AE) para definir las diferentes posiciones angulares relativas de dicho eje (AE) respecto a la sonda (SU) .
13. Dispositivo segïn una de las reivindicaciones 10 a 12, caracterizado por que dichos medios de procesamiento (MT) estïn dispuestos para comparar los datos de mapas obtenidos en dicho eje (AE) a controlar con los datos de primeros mapas de referencia obtenidos en un primer eje de referencia del mismo tipo que aquel controlado, pero 10 desprovisto de defectos, con el fin de sïlo retener los datos representativos de las indicaciones de los ecos que no estïn presentes en dichos primeros mapas de referencia y asï constituir mapas corregidos, dichos medios de procesamiento (MT) estïn dispuestos para comparar los datos de mapas obtenidos en dicho eje (AE) a controlar con los datos de segundos mapas de referencia obtenidos en un segundo eje de referencia de mismo tipo que aquel controlado, pero que posee defectos conocidos, con el fin de sïlo retener los datos representativos de las 15 indicaciones de los ecos representativos de los defectos conocidos presentes en dichos segundos mapas de referencia, y asï constituir mapas de defectos, dichos medios de procesamiento (MT) estïn dispuestos para comparar una amplitud umbral elegida con las amplitudes de los datos de mapas obtenidos en dicho eje (AE) a controlar, con el fin de sïlo retener datos representativos de las indicaciones de los ecos cuyas amplitudes son superiores a dicha amplitud umbral y que seïalan defectos, y asï constituir los mapas de defectos y dichos medios de procesamiento (MT) estïn dispuestos para generar una alarma en caso de detecciïn de una amplitud superior a dicha amplitud umbral.
14. Dispositivo segïn una de las reivindicaciones 10 a 13, caracterizado por que dichas sondas (SU) son aptas para emitir ultrasonidos segïn una ïnica direcciïn de ïngulo variable, dicho ïngulo varïa entre aproximadamente 0ï y 25 aproximadamente 70ï respecto a la direcciïn longitudinal o transversal.
15. Dispositivo segïn una de las reivindicaciones 10 a 13, caracterizado por que dichas sondas (SU) son del tipo llamado red de fase y son aptas para emitir ultrasonidos segïn direcciones comprendidas en un sector angular elegido, dicho sector angular estï comprendido entre aproximadamente 0ï y aproximadamente 70ï respecto a la direcciïn longitudinal o transversal.
FIG.3
Patentes similares o relacionadas:
 Método de procesamiento de señales resultantes de una adquisición mediante exploración ultrasónica, programa informático y dispositivo de exploración por ultrasonidos correspondiente, del 29 de Julio de 2020, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Metodo de procesamiento de senales (S) resultantes de una adquisicion por exploracion ultrasonica que comprende las siguientes etapas:
[…]
Método de procesamiento de señales resultantes de una adquisición mediante exploración ultrasónica, programa informático y dispositivo de exploración por ultrasonidos correspondiente, del 29 de Julio de 2020, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Metodo de procesamiento de senales (S) resultantes de una adquisicion por exploracion ultrasonica que comprende las siguientes etapas:
[…]
UN SISTEMA DE DETECCIÓN POR ULTRASONIDO EN LÍNEA DE LA CALIDAD DE LA FRUTA., del 4 de Junio de 2020, de UNIVERSIDAD DE CONCEPCION: Sistema de detección por ultrasonido en línea de la calidad de la fruta que comprende: un arco de soporte ubicado sobre la línea de proceso de forma perpendicular, […]
Procedimiento de detección por ultrasonidos de defectos en un material, del 1 de Abril de 2020, de ELECTRICITE DE FRANCE: Procedimiento de detección por ultrasonidos de defectos en un material, que comprende las etapas siguientes, para una pluralidad de pares de posición de emisión y de […]
Control de estructura industrial, del 8 de Enero de 2020, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Procedimiento de análisis de una estructura por correlación de campo acústico-elástico difuso, una fibra óptica que consta de una pluralidad de […]
Transformar muestras de datos de un A-SCAN en un espacio tridimensional para facilitar la visualización de fallas, del 18 de Diciembre de 2019, de GENERAL ELECTRIC COMPANY: Un método implementado por ordenador, que comprende: utilizar una unidad informática para realizar acciones que comprenden: obtener una pluralidad de […]
 Método y sistema para examinar el material interior de un objeto, tal como una tubería o un cuerpo humano, desde una superficie del objeto mediante el uso de ultrasonido, del 28 de Agosto de 2019, de Röntgen Technische Dienst B.V: Un método para examinar el material interior de un objeto desde una superficie de un objeto mediante el uso de ultrasonido […]
Método y sistema para examinar el material interior de un objeto, tal como una tubería o un cuerpo humano, desde una superficie del objeto mediante el uso de ultrasonido, del 28 de Agosto de 2019, de Röntgen Technische Dienst B.V: Un método para examinar el material interior de un objeto desde una superficie de un objeto mediante el uso de ultrasonido […]
Dispositivo de sondeo de múltiples sensores ultrasónicos y su procedimiento de fabricación, método de controlar tal dispositivo y programa de ordenador correspondiente, del 8 de Mayo de 2019, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Dispositivo de sondeo por ultrasonidos (10') que comprende: • un alojamiento , • medios (22, 26A) para determinar una ley de […]
Placa de prueba para aprobar parámetros de soldadura de acero o metal; método para aprobar parámetros de soldadura de acero y metal utilizando dicha placa de prueba, del 17 de Abril de 2019, de BAE SYSTEMS PLC: Placa de prueba para aprobar parámetros de soldadura de alto límite elástico 100 (HY100) utilizando un consumible de soldadura sub-adaptado, […]