PRENDA PARA LA ADQUISICIÓN DE DATOS DE MOVIMIENTO DE ARTICULACIONES.
1. Prenda (P) para la adquisición de datos de movimiento de articulaciones,
mediante sensores extensiométricos, caracterizada por el hecho de que comprende al menos dos sensores para una articulación, teniendo dichos sensores una velocidad de respuesta al encogerse menor que la velocidad de respuesta al alargarse.
2. Prenda (P) según la reivindicación 1 que comprende al menos un brazo textil para la adquisición de datos de movimiento de una persona, en la que:
- un primer sensor (1) está dispuesto en la parte que va del omóplato hasta la parte posterior del hombro;
- un segundo sensor (2) está dispuesto en la parte que va del pectoral hasta la parte anterior del hombro;
- un tercer sensor (3) está dispuesto en el dorso de la mano;
- un cuarto sensor (4) está dispuesto en la palma de la mano;
- un quinto sensor (5) está dispuesto en la parte posterior del codo;
- unos sensores sexto (6) y séptimo (7) están dispuestos cruzados o no en la parte distal posterior del antebrazo formando como mínimo entre ellos un ángulo de 30º.
- un octavo sensor (8) está dispuesto verticalmente bajo la axila desde el tronco.
- Unos sensores noveno (9) y décimo (10) tienen su inicio en cualquier punto del codo y se extienden cruzados o no, para terminar en el hombro formando entre ellos como mínimo un ángulo de 30º.
3. Prenda según cualquiera de las reivindicaciones anteriores, que es una prenda confeccionada, estando alguno de las sensores extensométricos (1, 2, 3, 4, 5, 6, 7, 8, 9 y 10) impresos en el tejido.
4. Prenda según cualquiera de las reivindicaciones anteriores, en la que los sensores están hechos de un elastómero de silicona.
5. Prenda según cualquiera de las reivindicaciones anteriores, en la que los sensores y el tejido tienen un módulo de Young similar.
6. Prenda según cualquiera de las reivindicaciones anteriores, en la que los cables de conexión están dispuestos en un túnel creado por las costuras.
7. Prenda según cualquiera de las reivindicaciones 2 a 6, que comprende en el codo un elemento de fijación en anillo unido a la superficie interna de la prenda, estando el quinto sensor (5) fijado en la parte opuesta a dicho elemento, de modo que se garantiza su fijación en la posición correcta en uso.
8. Prenda según la reivindicación 7, en la que el anillo es de silicona.
9. Prenda según cualquiera de las reivindicaciones 2 a 8, que comprende unida una funda para el pulgar, de modo que se garantiza la fijación en la posición correcta de los sensores tercero (3) y cuarto (4).
10. Prenda según cualquiera de las reivindicaciones 2 a 9, que comprende una cremallera en la parte anterior del antebrazo para proporcionar un mayor ajuste de la manga y garantizar una tensión adecuada de los sensores sexto (6) y séptimo (7).
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201430702.
Solicitante: FUNDACIÓ CETEMMSA.
Nacionalidad solicitante: España.
Inventor/es: ÁLVAREZ LASARTE SAGRERA,Irene, SANTANA ROMA,Úrbez, OPISSO SALLERAS,Eloy, CASELLAS COLL,Cristina, GÓMEZ PÉREZ,Cristina, GRAU HORTA,Nuria, MEDINA CASANOVAS,Josep, TORMOS MUÑOZ,José María.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B5/11 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 5/00 Medidas encaminadas a establecer un diagnóstico (diagnóstico por medio de radiaciones A61B 6/00; diagnóstico por ondas ultrasónicas, sónicas o infrasónicas A61B 8/00 ); Identificación de individuos. › Medida del movimiento del cuerpo entero o de partes del mismo, p. ej. temblor de la cabeza o de las manos, movilidad de un miembro (para medida del pulso A61B 5/02).
Fragmento de la descripción:
PRENDA PARA LA ADQUISICIÓN DE DATOS DE MOVIMIENTO DE ARTICULACIONES
La presente invención se refiere a una prenda para la adquisición de datos de movimiento de articulaciones mediante sensores extensiométricos, que permite registrar con elevada precisión los movimientos realizados por el usuario de la prenda, en especial con vistas a su rehabilitación.
Antecedentes de la invención Son conocidas las prendas para la adquisición de datos de movimiento de articulaciones, mediante sensores extensiométricos. El inconveniente de las prendas del estado de la técnica, como por ejemplo la que se describe en el documento US 2100010379A1 de De Rossi et Al, es que no suministran información lo suficientemente fiable del movimiento de las articulaciones.
Los sensores del estado de la técnica están situados a lo largo de todas la articulaciones hasta llegar a la electrónica de control, lo que dificulta separar los movimientos de cada articulación sin eliminar completamente la influencia de las otras articulaciones.
Descripción de la invención Para superar los inconvenientes del estado de la técnica, la presente invención propone una prenda para la adquisición de datos de movimiento de articulaciones, mediante sensores extensiométricos, que se caracteriza por el hecho de que comprende al menos dos sensores para una articulación, teniendo dichos sensores una velocidad de respuesta al encogerse menor que la velocidad de respuesta al alargarse.
Mediante la presente invención los sensores permiten mirar una sola articulación sin ser perturbados por los sensores del entorno mediante fijaciones en zonas estratégicas.
La fabricación de la prenda es industrializable y con un bajo consumo de material ya que los sensores están ubicados únicamente en zonas estratégicas.
Mediante la disposición de los sensores se consigue una captación más lineal de la medida de los ángulos de rotación y torsión lo que facilita la calibración del sistema. Se corrige también el comportamiento errático del material elastómero mediante la disposición de los sensores. .
Según diversos aspectos opcionales de la presente invención, que se podrán combinar siempre que sea posible:
La prenda comprende al menos un brazo textil para la adquisición de datos de movimiento de una persona, en la que:
- un primer sensor está dispuesto en la parte que va del omoplato hasta la parte posterior del hombro; -un segundo sensor está dispuesto en la parte que va del pectoral hasta la parte anterior del hombro;
-un tercer sensor está dispuesto en el dorso de la mano; -un cuarto sensor está dispuesto en la palma de la mano; -un quinto sensor está dispuesto en la parte posterior del codo; -unos sensores sexto y séptimo están dispuestos cruzados o no en la parte distal
posterior del antebrazo formando como mínimo entre ellos un ángulo de 30º . 20 -un octavo sensor está dispuesto verticalmente bajo la axila desde el tronco
-Unos sensores noveno y décimo tienen su inicio en cualquier punto del codo y se extienden cruzados o no, para terminar en el hombro formando entre ellos como mínimo un ángulo de 30º .
- la prenda es una prenda confeccionada, estando alguno de las sensores extensométricos impresos en el tejido.
- los sensores están hechos de un elastómero de silicona.
- los sensores y el tejido tienen un módulo de Young similar.
- los cables de conexión están dispuestos en un túnel creado por las costuras.
- la prenda comprende en el codo un elemento de fijación en anillo unido a la superficie 35 interna de la prenda, estando el quinto sensor fijado en la parte opuesta a dicho elemento, de modo que se garantiza su fijación en la posición correcta en uso.
- el anillo es de silicona.
- la prenda comprende unida una funda para el pulgar, de modo que se garantiza la fijación en la posición correcta de los sensores tercero y cuarto.
Finalmente, la prenda comprende una cremallera en la parte anterior del antebrazo para proporcionar un mayor ajuste de la manga y garantizar una tensión adecuada de los 10 sensores sexto y séptimo.
Breve descripción de las figuras Para mejor comprensión de cuanto se ha expuesto se acompañan unos dibujos en los que, 15 esquemáticamente y tan sólo a título de ejemplo no limitativo, se representa un caso práctico de realización.
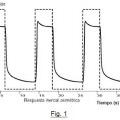
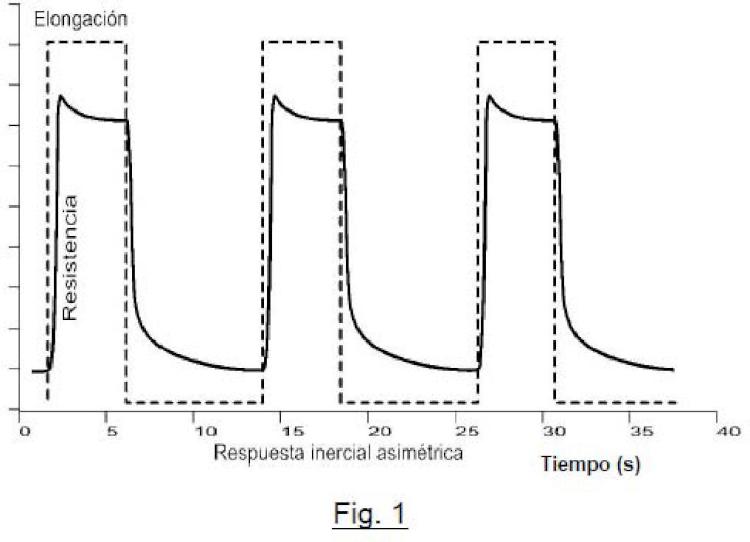
La figura 1 muestra un comportamiento asimétrico de un sensor resistivo de elongación, en este caso respuesta muy lenta al encogerse.
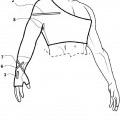
La figura 2 muestra una vista frontal en perspectiva de una disposición preferida de galgas según la invención.
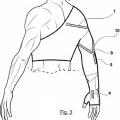
La figura 3 muestra una vista posterior en perspectiva de una disposición preferida de 25 galgas según la invención.
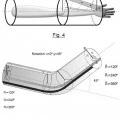
La figura 4 muestra la proyección cilíndrica sobre la prenda del trayecto del sensor.
La figura 5 muestra la abducción de una articulación con 2 grados de libertad 45º respecto a 30 su eje, y ubicación de los 3 sensores.
La figura 6 muestra la abducción de una articulación con 2 grados de libertad -45º respecto a su eje, y ubicación de los 3 sensores.
La figura 7 muestra la flexión de una articulación con 2 grados de libertad 45º respecto a su eje, y ubicación de los 3 sensores.
La figura 8 muestra la abducción de una articulación con 1 grado de libertad 45º respecto a su eje, y ubicación de los 2 sensores.
Las figuras 9 y 10 muestran la disposición especial prevista en el codo para garantizar un posicionamiento y unas medidas correctos.
La figura 11 muestra trayectos proyectados de una articulación de rotación, con dos sensores y con rotaciones de -270º a 270º .
La figura 12 muestra Trayectos proyectados de una articulación de rotación, con dos sensores y con rotaciones de -270º a 270º versión cruzada.
La figura 13 muestra Trayectos para 3 sensores de una articulación de rotación con un 15 movimiento de el eje B de -360º a +360º .
Descripción de una realización preferida La invención se refiere a una prenda P para la adquisición de datos de movimiento de articulaciones, mediante sensores extensiométricos, que se caracteriza por el hecho de que comprende al menos dos sensores para una articulación, teniendo dichos sensores una velocidad de respuesta al encogerse menor que la velocidad de respuesta al alargarse.
El mencionado comportamiento puede representarse mediante la gráfica de la figura 1, en la cual se muestra como el comportamiento inercial en la elongación es diferente al
comportamiento inercial en la contracción. Una parte de esa inercia viene determinada por la velocidad de estiramiento.
A continuación se detallan las dos disposiciones básicas objeto de la presente invención.
a) Articulación de rotación Tal como se muestra en la figura 4, la prenda que se ubica sobre el eje de la articulación deberá fijarse en los dos extremos A y B, para que se mueva solidariamente con la rotación de la articulación y por tanto torsione también el tejido y los sensores. Para este tipo de articulación, el recorrido de los sensores deberá ajustarse el máximo posible a una proyección cilíndrica de un trayecto o segmento de éste.
El trayecto a seguir en la proyección cilíndrica ha de cumplir que los trayectos cilíndricos a proyectar de cada sensor, deben ser como mínimo dos. Y cada uno de ellos deberá seguir 5 la línea más corta sobre el cilindro de la articulación si es posible, y entre ellos deben cumplir: (αi- βi) - (αi-1- βi-1) =360/N (donde la i cumple N≥i>1)
Siendo αi, el ángulo de desplazamiento del punto de inicio del trayecto del sensor (i) relativo al eje A de cada trayecto, y βi el ángulo de desplazamiento del final del trayecto respecto al eje B, deberán acercarse lo más posible a que el inicio y final de los trayectos para los N sensores (mínimo 2) .
Además, para que actúen de forma complementaria, para el estado intermedio de la rotación (si la rotación va de +θ a –θ para el estado intermedio rot=0) , ha de intentar cumplir al máximo que estén compensados aritméticamente:
Como ejemplo de articulación de este tipo puede citarse la rotación de la muñeca. El extremo A sería el codo, y el extremo B la muñeca, que gira sobre el mismo eje (antebrazo) . La rotación del hombro y cuello y tobillos humanos también estarían incluidos en este tipo.
b) Articulación de flexión/extensión y/o adducción/ abducción o con uno o dos grados de libertad.
Este tipo de articulación se muestra en las figuras 5 a 8. En este caso, la fijación puede ser ubicada en...
Reivindicaciones:
1. Prenda (P) para la adquisición de datos de movimiento de articulaciones, mediante sensores extensiométricos, caracterizada por el hecho de que comprende al menos dos sensores para una articulación, teniendo dichos sensores una velocidad de respuesta al encogerse menor que la velocidad de respuesta al alargarse.
2. Prenda (P) según la reivindicación 1 que comprende al menos un brazo textil para la adquisición de datos de movimiento de una persona, en la que:
- un primer sensor (1) está dispuesto en la parte que va del omóplato hasta la parte posterior del hombro;
- un segundo sensor (2) está dispuesto en la parte que va del pectoral hasta la parte anterior del hombro;
- un tercer sensor (3) está dispuesto en el dorso de la mano;
- un cuarto sensor (4) está dispuesto en la palma de la mano;
- un quinto sensor (5) está dispuesto en la parte posterior del codo;
- unos sensores sexto (6) y séptimo (7) están dispuestos cruzados o no en la parte distal posterior del antebrazo formando como mínimo entre ellos un ángulo de 30º.
- un octavo sensor (8) está dispuesto verticalmente bajo la axila desde el tronco.
- Unos sensores noveno (9) y décimo (10) tienen su inicio en cualquier punto del codo y se extienden cruzados o no, para terminar en el hombro formando entre ellos como mínimo un ángulo de 30º.
3. Prenda según cualquiera de las reivindicaciones anteriores, que es una prenda confeccionada, estando alguno de las sensores extensométricos (1, 2, 3, 4, 5, 6, 7, 8, 9 y 10) impresos en el tejido.
4. Prenda según cualquiera de las reivindicaciones anteriores, en la que los sensores están hechos de un elastómero de silicona.
5. Prenda según cualquiera de las reivindicaciones anteriores, en la que los sensores y el tejido tienen un módulo de Young similar.
6. Prenda según cualquiera de las reivindicaciones anteriores, en la que los cables de conexión están dispuestos en un túnel creado por las costuras.
7. Prenda según cualquiera de las reivindicaciones 2 a 6, que comprende en el codo un elemento de fijación en anillo unido a la superficie interna de la prenda, estando el quinto sensor (5) fijado en la parte opuesta a dicho elemento, de modo que se garantiza su fijación en la posición correcta en uso.
8. Prenda según la reivindicación 7, en la que el anillo es de silicona.
9. Prenda según cualquiera de las reivindicaciones 2 a 8, que comprende unida una funda para el pulgar, de modo que se garantiza la fijación en la posición correcta de los sensores tercero (3) y cuarto (4).
10. Prenda según cualquiera de las reivindicaciones 2 a 9, que comprende una cremallera en la parte anterior del antebrazo para proporcionar un mayor ajuste de la manga y garantizar una tensión adecuada de los sensores sexto (6) y séptimo (7).
Patentes similares o relacionadas:
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO AUTOMÁTICO DE LA LOCOMOCIÓN DE NEMATODOS U ORGANISMOS PEQUEÑOS DE TAMAÑOS SIMILARES POR INTERFEROMETRÍA TEMPORAL DE MICROHACES DE LUZ, del 23 de Julio de 2020, de PHYLUMTECH S.A: Procedimiento y dispositivo de registro automático de la locomoción de nematodos u organismos pequeños de tamaños similares por interferometría temporal de microhaces […]
DISPOSITIVO PARA EVITAR EPISODIOS DE APNEA EN INFANTES, del 11 de Junio de 2020, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: Dispositivo para evitar episodios de apnea en infantes, que simula un patrón de respiración adecuado para sincronizar la respiración del infante y que […]
Control electrofisiológico de contracciones uterinas, del 10 de Junio de 2020, de Nemo Healthcare B.V: Un dispositivo de procesamiento de señales para procesar señales electrofisiológicas relacionadas con contracciones uterinas de una mujer […]
Estímulo terapéutico mejorado para un sistema de entrañado de succión no nutritiva, del 10 de Junio de 2020, de Innara Health, Inc: Un sistema de procesamiento codificado con una aplicación para estimular un CPG y un nervio trigémino en un cerebro humano, influyendo […]
Aparato y método para la evaluación automática del transcurso de una sesión de entrenamiento, del 3 de Junio de 2020, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para la valoración automática de un transcurso de un ejercicio de entrenamiento, que comprende: proporcionar una pluralidad de informaciones […]
 Procedimiento y aparato para determinar información indicativa de disfunciones cardíacas, del 29 de Abril de 2020, de Precordior Oy: Un aparato que comprende:
- una interfaz de señal para recibir una primera señal indicativa de movimiento cardiovascular y medida con un elemento […]
Procedimiento y aparato para determinar información indicativa de disfunciones cardíacas, del 29 de Abril de 2020, de Precordior Oy: Un aparato que comprende:
- una interfaz de señal para recibir una primera señal indicativa de movimiento cardiovascular y medida con un elemento […]
Sistema y método para determinar el sueño y las fases de sueño de una persona, del 22 de Abril de 2020, de V-Watch SA: Un sistema para determinar la transición de fase de sueño de una persona, el sistema que comprende: medios de detección de la frecuencia cardíaca […]
Sistema para restaurar la función muscular de la columna lumbar, del 25 de Marzo de 2020, de Mainstay Medical Limited: Un sistema para recuperar la función muscular de la columna lumbar, el sistema que comprende: uno o más electrodos configurados […]