Dispositivo de medición de posición y procedimiento para determinar la posición absoluta.
Dispositivo de medición de posición con
- un código (10) que se compone de una sucesión de elementos de código (C,
CL, CR, CM) dispuestos uno tras otro en una dirección de medición (X), en el que al menos dos elementos de código (C, CL, CR, CM) consecutivos forman en cada caso una palabra de clave (CW) con una información de posición,
- una unidad de exploración (20) que comprende una unidad de iluminación (30) para emitir luz dirigida en la dirección del código (10) para reproducir al menos los elementos de código (C, CL, CR, CM) que forman la palabra de código (CW) en una unidad de detector (40), presentando la unidad de detector (40) en la dirección de medición (X) al menos dos elementos de detector (D; DL1-DL6; DR1-DR6; DM1-DM6) por elemento de código (C, CL, CR, CM) que forma una palabra de código (CW), así como una unidad de valoración (50) en la que puede averiguarse a partir de las señales de detector (S) de los elementos de detector (D; DL1-DL6; DR1-DR6; DM1-DM6) la palabra de código (CW) con la información de posición actual, estando dispuestos la unidad de exploración (20) y el código (10) de manera que pueden moverse relativamente uno respecto a otro en la dirección de medición (X) ,
caracterizado por que
en la unidad de valoración (50) las señales de detector (S) que van a valorarse para la formación de la palabra de código (CW) pueden seleccionarse en función de la reproducción de los elementos de código (C, CL, CR, CM) que forman la palabra de código (CW) en la unidad de detector (40), donde
- la unidad de valoración (50) comprende una unidad de procesamiento de señales (60), a la que se suministran las señales de detector (S), y en la unidad de procesamiento de señales (60) se generan señales de posición digitales (P) a partir de las señales de detector (S) y
- la unidad de valoración (50) comprende medios para la formación de la palabra de código (CW) mediante la selección de señales de posición (P) por medio de una información de corrección (KORR1, KORR2) y de un valor de posición precisa (FP) y
donde la información de corrección (KORR1, KORR2) comprende una información de asociación que considera la reproducción del código (10) en la unidad de detector (40).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08012745.
Solicitante: DR. JOHANNES HEIDENHAIN GMBH.
Nacionalidad solicitante: Alemania.
Dirección: DR. JOHANNES-HEIDENHAIN-STRASSE 5 83301 TRAUNREUT ALEMANIA.
Inventor/es: OBERHAUSER,JOHANN, SCHÜRMANN,THOMAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01D5/347 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que utilizan escalas de codificación de desplazamiento.
PDF original: ES-2542348_T3.pdf
Fragmento de la descripción:
Dispositivo de medición de posición y procedimiento para determinar la posición absoluta
La invención se refiere a un dispositivo de medición de posición para determinar la posición absoluta de acuerdo con el preámbulo de la reivindicación 1, así como a un procedimiento para determinar la posición absoluta de acuerdo con el preámbulo de la reivindicación 14.
En muchas zonas, se emplean cada vez con más frecuencia dispositivos de medición de posición absoluta en los que la información de posición absoluta se deriva de una pista de código con elementos de código dispuestos unos tras otros en la dirección de medición. En este caso, los elementos de código están previstos en distribución pseudoaleatoria de manera que un determinado número de elementos de código consecutivos forma en cada caso un patrón de bits. Al desplazar el dispositivo de exploración con respecto a la pista de código alrededor de un único elemento de código se forma ya un nuevo patrón de bits, y mediante la gama de medida total que va a registrarse de manera absoluta se proporciona una secuencia de diferentes patrones de bits.
Un código secuencial de este tipo se denomina código en cadena o pseudo-random-code (PRC) (código pseudoaleatorio). Una variante especialmente protegida de interferencias de un código pseudoaleatorio se produce cuando los elementos de código presentan una llamada codificación Manchester, que significa que los elementos de código presentan dos subdominios de igual magnitud que presentan características complementarias entre sí. La información binaria se establece aquí mediante la sucesión de los subdominios
En el documento DE 10244235A1 se describe un dispositivo de medición de posición genérico cuya pista de código absoluta se compone de una disposición pseudoaleatoria de elementos de código que presenta una codificación Manchester. Para establecer si las señales de exploración de elementos detectores presentan valores válidos para la valoración de la información de posición se propone, por un lado, utilizar señales de exploración de una pista ¡ncremental que discurren paralelas a la pista de código absoluta para seleccionar los elementos de detector necesarios para la valoración de la pista absoluta. Por otro lado, para evaluar la fiabilidad de las señales de detector se sugiere distribuir los elementos de detector en un grupo con elementos de detector numerados con número par y un grupo numerados con número impar, y formar en cada caso señales de diferencia de los elementos de detector directamente consecutivos de cada grupo y compararlos con un valor de comparación. El valor de posición se forma finalmente por las señales de exploración válidas que resultan de la comparación.
Un principio de funcionamiento muy extendido es la exploración óptica. En este caso se reproduce una graduación de medición que se aplica sobre una medida materializada con luz dirigida que se emite desde una fuente de luz sobre un número de fotodetectores. La medida materializada está dispuesta de manera móvil en la trayectoria de los rayos de la luz, y modula la luz cuando la graduación de medición se mueve con respecto a la fuente de luz y a los fotodetectores. La información de posición se averigua mediante la valoración de las señales de salida de los fotodetectores. Dependiendo de si se trata de un aparato de medición de posición rotatorio o lineal, la medida materializada es un disco de graduación circular o una escala lineal. La graduación de medición puede componerse de una o varias pistas con zonas con diferentes propiedades ópticas, tales como por ejemplo transparente/opaco, o reflectante/no reflectante.
Los aparatos de medición absoluta cuya pista de código está configurada como PRC necesitan para la lectura de los elementos de código un gran número de elementos de detector que están dispuestos unos respecto a otros en una separación establecida de manera exacta, la cual depende de los elementos de código que van a leerse. De manera preferida, los elementos de detector están agrupados como conjunto de detectores en un chip semiconductor. En el caso de un principio de exploración óptico de este tipo, es especialmente problemático el hecho de que la fiabilidad de la lectura de la pista de código dependa de la exactitud de la reproducción de la parte de la pista de código relevante para la lectura en el conjunto de detectores. Ésta depende de la disposición geométrica de la fuente de luz, pista de código y elementos de detector. Si, por ejemplo, la orientación de la luz se aparta de lo necesario, establecido por la pista de código y el conjunto de detectores, entonces no todos los elementos de detector que se emplean para averiguar la posición actual reciben la misma cantidad de luz. Por ello pueden aparecer estados sin definir y puede incluso dar lugar a averiguar valores de posición falsos.
La invención se basa en el objetivo de crear un dispositivo de medición de posición con fiabilidad, o bien, seguridad en el funcionamiento mejoradas. Adicionalmente, la invención se basa en el objetivo de indicar un procedimientos para determinar la posición absoluta que presente una fiabilidad, o bien, seguridad en el funcionamiento mejoradas.
Con respecto al dispositivo de medición de posición, este objetivo se resuelve mediante las características de la reivindicación 1.
Se propone un dispositivo de medición de posición, con un código y una unidad de exploración. El código se compone de una sucesión de elementos de código dispuestos consecutivamente en una dirección de medición, formando al menos dos elementos de código consecutivos en cada caso una palabra de código con una información de posición. La unidad de exploración comprende una unidad de iluminación para emitir luz dirigida en la dirección
del código para reproducir al menos los elementos de código que forman la palabra de código en una unidad de detector, presentando la unidad de detector en la dirección de medición al menos dos elementos de detector por elemento de código que forma una palabra de código, así como una unidad de valoración en la que puede averiguarse a partir de las señales de detector de los elementos de detector la palabra de código con la información de posición actual. La unidad de exploración y el código se disponen de manera que pueden moverse relativamente uno respecto a otro en la dirección de medición. La Invención se caracteriza por que, en la unidad de valoración, las señales de detector que van a valorarse para la formación de la palabra de código en la unidad de valoración pueden seleccionarse en función de la reproducción de los elementos de código que forman la palabra de código en la unidad de detector.
Un procedimiento de acuerdo con la invención para determinar la posición absoluta se determina mediante las características de la reivindicación 14.
En las reivindicaciones dependientes de la reivindicación 1 o 14 están Indicadas en cada caso configuraciones ventajosas de la Invención.
La invención se explica con más detalle mediante los dibujos, en este caso muestran:
la figura 1a la figura 1b
la figura 2
la figura 3a
la figura 3b
la figura 3c
la figura 4
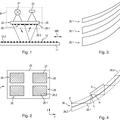
un dispositivo de medición de posición en representación esquemática,
un dispositivo de medición de posición en representación esquemática con una unidad de iluminación desajustada,
un diagrama de bloques de una unidad de valoración de un dispositivo de medición de posición de acuerdo con la invención,
la selección de las señales de detector en un dispositivo de medición de posición de acuerdo con la invención con luz orientada en paralelo
la selección de las señales de detector en un dispositivo de medición de posición de acuerdo con la invención con luz orientada convergentemente,
la selección de las señales de detector en un dispositivo de medición de posición de acuerdo con la invención con luz orientada divergentemente y
un diagrama vectorial del valor de posición precisa.
Mediante las figuras 1a y 1b debe aclararse en primer lugar adicionalmente, cómo la orientación de la luz empleada para la lectura de un código puede influir en la fiabilidad de la averiguación del valor de posición. La figura 1a muestra esquemáticamente un dispositivo de medición de posición óptico en el que se explora un código 10 por medio de una unidad de exploración 20 que comprende una unidad de iluminación 30, una unidad de detector 40 y una unidad de valoración 50. El código 10 se aplica en una medición materializada. Dependiendo de si el dispositivo de medición de posición sirve para medir posiciones lineales... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de medición de posición con
- un código (10) que se compone de una sucesión de elementos de código (C, CL, CR, CM) dispuestos uno tras otro en una dirección de medición (X), en el que al menos dos elementos de código (C, CL, CR, CM) consecutivos forman en cada caso una palabra de clave (CW) con una información de posición,
- una unidad de exploración (20) que comprende una unidad de iluminación (30) para emitir luz dirigida en la dirección del código (10) para reproducir al menos los elementos de código (C, CL, CR, CM) que forman la palabra de código (CW) en una unidad de detector (40), presentando la unidad de detector (40) en la dirección de medición (X) al menos dos elementos de detector (D; DL1-DL6; DR1-DR6; DM1-DM6) por elemento de código (C, CL, CR, CM) que forma una palabra de código (CW), así como una unidad de valoración (50) en la que puede averiguarse a partir de las señales de detector (S) de los elementos de detector (D; DL1-DL6; DR1-DR6; DM1-DM6) la palabra de código (CW) con la información de posición actual, estando dispuestos la unidad de exploración (20) y el código (10) de manera que pueden moverse relativamente uno respecto a otro en la dirección de medición (X),
caracterizado porque
en la unidad de valoración (50) las señales de detector (S) que van a valorarse para la formación de la palabra de código (CW) pueden seleccionarse en función de la reproducción de los elementos de código (C, CL, CR, CM) que forman la palabra de código (CW) en la unidad de detector (40), donde
- la unidad de valoración (50) comprende una unidad de procesamiento de señales (60), a la que se suministran las señales de detector (S), y en la unidad de procesamiento de señales (60) se generan señales de posición digitales (P) a partir de las señales de detector (S) y
- la unidad de valoración (50) comprende medios para la formación de la palabra de código (CW) mediante la selección de señales de posición (P) por medio de una información de corrección (KORR1, KORR2) y de un valor de posición precisa (FP) y
donde la información de corrección (KORR1, KORR2) comprende una información de asociación que considera la reproducción del código (10) en la unidad de detector (40).
2. Dispositivo de medición de posición de acuerdo con la reivindicación 1, donde los elementos de código (C, CL, CR, CM) se componen de dos subdominios (CA, CB; CLA, CLB; CRA, CRB; CMA, CMB) consecutivos en la dirección de medición (X), que presentan propiedades complementarias entre sí, y que por cada subdominio (CA, CB; CLA, CLB; CRA, CRB; CMA, CMB) están previstos al menos dos elementos de detector (D; DL1-DL6; DR1- DR6; DM1-DM6).
3. Dispositivo de medición de posición de acuerdo con la reivindicación 2, donde la unidad de procesamiento de señales (60) comprende componentes de disparador (TL1-TL4; TR1-TR4; TM1-TM4) a los que se suministran en cada caso dos señales de detector (S) desde detectores (D; DL1-DL6; DR1-DR6; DM1-DM6), que en la dirección de medición (X) presentan la misma distancia que dos subdominios (CA, CB; CLA, CLB; CRA, CRB; CMA, CMB) dispuestos consecutivos en la dirección de medición (X) y los componentes de disparador (TL1-TL4; TR1-TR4; TM1- TM4) generan las señales de posición digitales (P) a partir de las señales de detector (S) mediante la formación de diferencia.
4. Dispositivo de medición de posición de acuerdo con una de las reivindicaciones anteriores, donde las señales de posición digitales (P) se suministran a una unidad de valoración (70), que emite señales de posición corregidas (PK), donde la selección de las señales de posición corregidas (PK) está determinada a partir de las señales de posición (P) de una unidad de corrección (80) por medio de la información de corrección (KORR1, KORR2) y del valor de posición precisa (FP).
5. Dispositivo de medición de posición de acuerdo con una de las reivindicaciones anteriores, donde la información de corrección (KORR1, KORR2) comprende una información de asociación estática.
6. Dispositivo de medición de posición de acuerdo con una de las reivindicaciones anteriores, donde la información de corrección (KORR1, KORR2) comprende una información de asociación en función de la posición.
7. Dispositivo de medición de posición de acuerdo con una de las reivindicaciones anteriores, donde la unidad de valoración (50) comprende además una unidad de memoria (100) en la que pueden almacenarse las informaciones de asociación.
8. Dispositivo de medición de posición de acuerdo con una de las reivindicaciones anteriores, donde la unidad de valoración (50) contiene adicionalmente al menos un sensor de temperatura (110) y la información de corrección (KORR1, KORR2) comprende adicionalmente una información de asociación en función de la temperatura.
9. Dispositivo de medición de posición de acuerdo con una de las reivindicaciones 4 a 8, donde la unidad de valoración (50) comprende adicionalmente una unidad de averiguación de palabra de código (90) a la que se suministran las señales de posición corregidas (PK), así como el valor de posición precisa (FP) para la formación de la palabra de código (CW).
10. Dispositivo de medición de posición de acuerdo con la reivindicación 9, donde la averiguación de la palabra de código (CW) se realiza a partir de las señales de posición corregidas (PK) por medio de los bits más significativos del valor de posición precisa (FP).
11. Dispositivo de medición de posición de acuerdo con una de las reivindicaciones anteriores, donde el valor de posición precisa (FP) puede averiguarse mediante la valoración de una pista incremental (200) que discurre paralela al código (10).
12. Procedimiento para la medición de posición absoluta con un dispositivo de medición de posición con
- un código (10) que se compone de una sucesión de elementos de código (C, CL, CR, CM) dispuestos uno tras otro en una dirección de medición (X), en el que al menos dos elementos de código (C, CL, CR, CM) consecutivos forman en cada caso una palabra de clave (CW) con una información de posición,
- una unidad de exploración (20) que comprende una unidad de iluminación (30) para emitir luz dirigida en la dirección del código (10) para reproducir al menos los elementos de código (C, CL, CR, CM) que forman la palabra de código (CW) en una unidad de detector (40), presentando la unidad de detector (40) en la dirección de medición (X) al menos dos elementos de detector (D; DL1-DL6; DR1-DR6; DM1-DM6) por elemento de código (C, CL, CR, CM) que forma una palabra de código (CW), así como una unidad de valoración (50) en la que puede averiguarse a partir de las señales de detector (S) de los elementos de detector (D; DL1-DL6; DR1-DR6; DM1-DM6) la palabra de código (CW) con la información de posición actual, estando dispuestos la unidad de exploración (20) y el código (10) de manera que pueden moverse relativamente uno respecto a otro en la dirección de medición (X),
caracterizado por que
en la unidad de valoración (50) las señales de detector (S) que van a valorarse para la formación de la palabra de código (CW) pueden seleccionarse en función de la reproducción de los elementos de código (C, CL, CR, CM) que forman la palabra de código (CW) en la unidad de detector (40), donde
- la unidad de valoración (50) comprende una unidad de procesamiento de señales (60), a la que se suministran las señales de detector (S) y en la unidad de procesamiento de señales (60) se generan señales de posición digitales (P) a partir de las señales de detector (S) y
- la unidad de valoración (50) comprende medios para la formación de la palabra de código (CW) mediante la selección de señales de posición (P) por medio de una información de corrección (KORR1, KORR2) y de un valor de posición precisa (FP) y
donde la información de corrección (KORR1, KORR2) comprende una información de asociación que considera la reproducción del código (10) en la unidad de detector (40).
13. Procedimiento de acuerdo con la reivindicación 12, donde los elementos de código (C, CL, CR, CM) se componen de dos subdominios (CA, CB; CLA, CLB; CRA, CRB; CMA, CMB) consecutivos en la dirección de medición (X), que presentan propiedades complementarias entre sí, y que por cada subdominio (CA, CB; CLA, CLB; CRA, CRB; CMA, CMB) están previstos al menos dos elementos de detector (D; DL1-DL6; DR1-DR6; DM1-DM6) y la unidad de procesamiento de señales (60) comprende componentes de disparador (TL1-TL4; TR1-TR4; TM1-TM4) a los que se suministran en cada caso dos señales de detector (S) desde detectores (D; DL1-DL6; DR1-DR6; DM1- DM6) que en la dirección de medición (X) presentan la misma distancia que dos subdominios (CA, CB; CLA, CLB; CRA, CRB; CMA, CMB) dispuestos consecutivos en la dirección de medición (X) y los componentes de disparador (TL1-TL4; TR1-TR4; TM1-TM4) generan las señales de posición digitales (P) a partir de las señales de detector (S) mediante la formación de diferencia.
14. Procedimiento de acuerdo con una de las reivindicaciones 12 o 13, donde las señales de posición digitales (P) se suministran a una unidad de valoración (70), que emite señales de posición corregidas (PK), donde la selección de las señales de posición corregidas (PK) está determinada a partir de las señales de posición (P) de una unidad de corrección (80) por medio de la información de corrección (KORR1, KORR2) y del valor de posición precisa (FP).
15. Procedimiento de acuerdo con una de las reivindicaciones 12 a 14, donde la información de corrección (KORR1, KORR2) comprende una información de asociación estática.
16. Procedimiento de acuerdo con una de las reivindicaciones 12 a 15, donde la información de corrección (KORR1, KORR2) comprende una información de asociación en función de la posición.
17. Procedimiento de acuerdo con una de las reivindicaciones 12 a 16, donde la unidad de valoración (50) contiene adicionalmente al menos un sensor de temperatura (110) y la información de corrección (KORR1, KORR2) comprende adicionalmente una información de asociación en función de la temperatura.
18. Procedimiento de acuerdo con una de las reivindicaciones 12 a 17, donde la unidad de valoración (50)
comprende adicionalmente una unidad de averiguación de palabra de código (90) a la que se suministran las señales de posición corregidas (PK), así como el valor de posición precisa (FP) para la formación de la palabra de código (CW).
19. Procedimiento de acuerdo con la reivindicación 18, donde la averiguación de la palabra de código (CW) se
realiza a partir de las señales de posición corregidas (PK) por medio de los bits más significativos del valor de posición precisa (FP).
Patentes similares o relacionadas:
 Estructura de malla para un dispositivo óptico de medición de posición, del 29 de Julio de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Estructura de malla para un dispositivo óptico de medición de posición,
- que contiene zonas de partición que presentan como mínimo […]
Estructura de malla para un dispositivo óptico de medición de posición, del 29 de Julio de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Estructura de malla para un dispositivo óptico de medición de posición,
- que contiene zonas de partición que presentan como mínimo […]
Aparato codificador, del 6 de Mayo de 2020, de RENISHAW PLC: Un aparato codificador que comprende una escala , una carcasa protectora y un conjunto de cabezal de lectura que comprende un receptor […]
Dispositivo de medición de la posición y procedimiento para el funcionamiento de un dispositivo de medición de la posición, del 29 de Abril de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de la posición que comprende: - un soporte de división , sobre el que está dispuesta la división de la medición , - una […]
Emisor de señal electro-óptico, del 12 de Febrero de 2020, de Brendel Holding GmbH & Co. KG: Emisor de señal, con un primer elemento (A) y un segundo elemento (B) que puede moverse en relación con este a lo largo de al menos una dirección de movimiento relativa, presentando […]
Dispositivo con una escala fijada en un soporte, del 11 de Diciembre de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo con una escala dispuesta a distancia en un soporte , en el que la escala presenta una división de medición y está fijada por medio de puntos de […]
Dispositivo de medida de posición y método para utilizar un dispositivo de medida de posición, del 6 de Noviembre de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medida de posición que comprende un soporte de graduación sobre el que hay situada una graduación de medida , una unidad de detección […]
Aparato codificador de posición, del 23 de Octubre de 2019, de RENISHAW PLC: Un cabezal de lectura del codificador de posición para leer una serie de marcas de posición en una escala para determinar la posición […]
Carril de escala, del 16 de Octubre de 2019, de RENISHAW PLC: Un aparato de medición que comprende una escala metrológica alargada posicionada en un sustrato por medio de un carril de escala que comprende […]