Máquina de trabajo del suelo con un marco portador mejorado.
Máquina de trabajo del suelo (1) con un marco portador (4) que comprende dos brazos inferiores (5) y un brazo superior (6),
siendo dicho marco portador (4) susceptible de pasar de una posición baja a una posición alta y a la inversa, por medio de dos accionadores (8), estando un accionador (8) asociado a un brazo inferior (5) y extendiéndose cerca de dicho brazo inferior (5), caracterizada por que cada accionador (8) se extiende, visto desde arriba, de manera inclinada con respecto al plano vertical medio (7) de dicha máquina de trabajo del suelo (1).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12154016.
Solicitante: KUHN S.A..
Nacionalidad solicitante: Francia.
Dirección: 4, IMPASSE DES FABRIQUES 67700 SAVERNE FRANCIA.
Inventor/es: TEITGEN,HERVÉ, REINHARDT,MICHEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A01B49/06 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01B TRABAJO DE LA TIERRA EN AGRICULTURA O EN SILVICULTURA; PARTES CONSTITUTIVAS O ACCESORIOS DE MAQUINAS O INSTRUMENTOS AGRICOLAS, EN GENERAL (apertura o recubrimiento de surcos o de hoyos para la siembra, plantación o abonado A01C 5/00; máquinas para la recogida de raíces o tubérculos A01D; segadoras convertibles en aparatos para trabajo de la tierra o capaces de trabajar la tierra A01D 42/04; segadoras combinadas con instrumentos para trabajo de la tierra A01D 43/12; trabajo de la tierra para obras públicas o explotaciones mineras E01, E02, E21). › A01B 49/00 Máquinas combinadas (dispositivos auxiliares incorporados a máquinas de otro género, p. ej. rastrillos incorporados a arados, ver los grupos relativos a estas máquinas). › para sembrar o esparcir fertilizantes.
PDF original: ES-2516821_T3.pdf
Fragmento de la descripción:
Máquina de trabajo del suelo con un marco portador mejorado.
La presente invención se refiere al campo técnico general de las máquinas agrícolas destinadas a las operaciones de trabajo del suelo. La invención se refiere en particular a una máquina de trabajo del suelo con un marco portador que comprende dos brazos inferiores y un brazo superior, siendo dicho marco portador susceptible de pasar de una posición baja a una posición alta, y a la inversa, por medio de dos accionadores, estando un accionador asociado a un brazo inferior y extendiéndose en la proximidad de dicho brazo inferior.
Dicha máquina de trabajo del suelo con un marco portador es conocida a partir del documento DE 195 40 932. El marco portador corresponde a un sistema de enganche en tres puntos que comprende dos brazos inferiores y un brazo superior. El brazo superior se extiende en el plano vertical medio de la máquina y los brazos inferiores se extienden a uno y otro lado de dicho brazo superior. Los brazos inferiores son sustancialmente paralelos al brazo superior. El marco portador, montado sobre el chasis de la máquina de trabajo del suelo, pasa de una posición baja a una posición alta, y a la inversa, por medio de dos accionadores. Un accionador está asociado a un brazo inferior y se extiende en la proximidad del brazo inferior. Cada accionador se extiende entre el chasis y el marco portador. Una sembradora está destinada a ser montada en la parte trasera de la máquina de trabajo del suelo gracias al marco portador. El marco portador y, en particular, los brazos inferiores deben soportar la carga de la sembradora en estática o en dinámica cuando el marco portador pasa de una posición a otra. Con el fin de encajar los esfuerzos laterales sobre el marco portador y evitar su deformación, la sección y el espesor de los brazos inferiores son importantes. La estructura del marco portador está así rigidizada, pero el peso del marco portador está agravado por los imponentes brazos inferiores. Por tanto, estos brazos inferiores ocupan un espacio no despreciable en la máquina de trabajo del suelo, lo cual reduce y complica la disposición de equipos complementarios sobre el chasis.
La presente invención tiene por objetivo evitar los inconvenientes citados anteriormente. En particular, debe proponer una máquina de trabajo del suelo con un marco portador que resista a los esfuerzos y cuyo peso sea reducido.
Con este fin, una importante característica de la invención consiste en que cada accionador se extienda, visto desde arriba, de manera inclinada con respecto al plano vertical medio de dicha máquina de trabajo del suelo. Gracias a esta disposición, los esfuerzos sobre el marco portador son encajados por los accionadores. La inclinación de los accionadores permite estabilizar el marco portador.
Otras características y ventajas de la invención se desprenderán de la descripción que sigue con respecto a los dibujos adjuntos, que se proporcionan únicamente a título de ejemplos no limitativos de la invención con referencias. En estos dibujos:
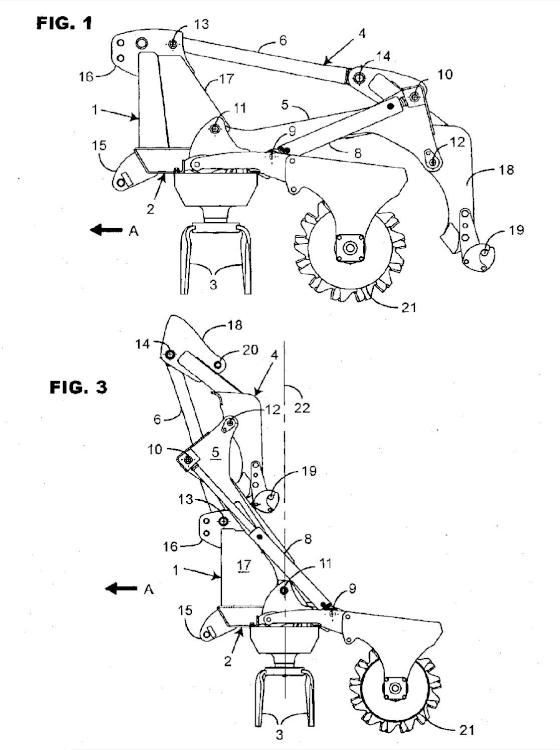
- la figura 1 representa una vista lateral de una máquina agrícola según la presente invención con un marco portador en una posición baja,
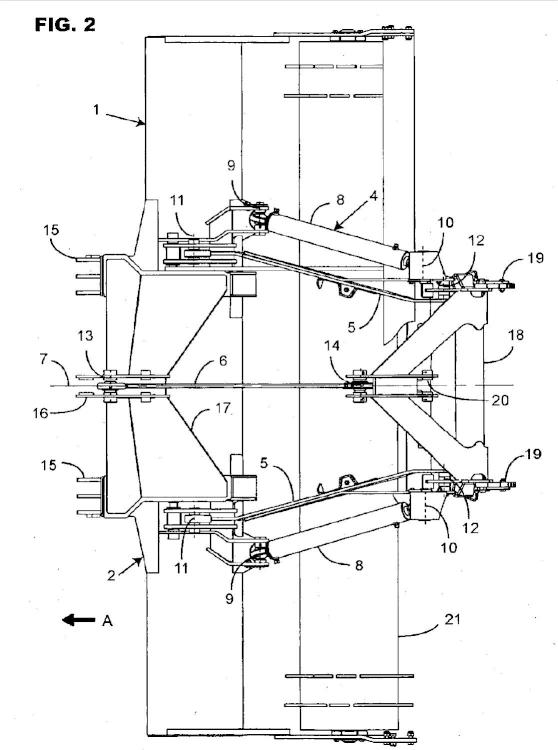
- la figura 2 es una vista desde arriba de la máquina agrícola de la figura 1,
- la figura 3 representa una vista lateral de la máquina agrícola con un marco portador en una posición alta.
La máquina agrícola representada en la figura 1 es una máquina de trabajo del suelo (1) para la preparación de camas de semillas. Esta máquina de trabajo del suelo (1) presenta un chasis (2) que lleva unas herramientas de trabajo (3). La máquina de trabajo del suelo (1) está provista de un marco portador (4) que permite, por ejemplo, llevar una sembradora. Esta combinación, formada por una máquina de trabajo del suelo y una sembradora, permite realizar diferentes tareas durante una única pasada sobre una parcela. Permite realizar la preparación de la cama de semillas y la siembra en una sola pasada. Los tiempos de trabajos para la implantación de la simiente se reducen y los aplastamientos del suelo son limitados. La máquina agrícola podrá trabajar o bien sobre el terreno de labranza, o bien sobre un suelo no trabajado. Para ello, un tractor (no representado) es inducido a desplazar y a animar con movimiento esta combinación según una dirección de avance indicada por la flecha (A). En la continuación de la descripción, las nociones siguientes "delantero", "trasero" y "delante", "detrás" están definidas con respecto al sentido de avance (A). La máquina de trabajo del suelo (1) está destinada a ser enganchada al sistema de enganche en tres puntos del tractor.
El marco portador (4) comprende dos brazos inferiores (5) y por lo menos un brazo superior (6). A la luz de la figura 2, el marco portador (4) corresponde ventajosamente a un sistema de enganche en tres puntos. Por tanto, el marco portador (4) comprende dos brazos inferiores (5) y un brazo superior (6). El marco portador (4) está destinado a equipar la máquina de trabajo del suelo (1), y está montado sobre su chasis (2). El brazo superior (6) se extiende sustanclalmente en un plano vertical medio (7) del chasis (2) de la máquina de trabajo del suelo (1). El plano vertical medio (7) está dirigido de manera sustancialmente paralela al plano que contiene la dirección de avance (A). Los brazos Inferiores (5) se extienden a uno y otro lado del brazo superior (6) y, por tanto, del plano vertical medio (7). El marco portador (4) es susceptible de pasar de una posición baja a una posición alta, y a la inversa, por medio de por
lo menos un accionador (8). La figura 1 representa el marco portador (4) en una posición baja y la figura 3 representa el marco portador (4) en una posición alta. Los accionadores (8) están dispuestos entre el chasis (2) y el marco portador (4). Un accionador (8) se extiende en la proximidad de un brazo inferior (5). Un accionador (8) está asociado a un brazo inferior (5) correspondiente. Cada accionador (8) está unido al chasis (2) por medio de una primera articulación (9) de eje sustancialmente horizontal y está unido al marco portador (4) por medio de una segunda articulación (10) de eje sustancialmente horizontal. Los ejes de las articulaciones (9 y 10) son perpendiculares a la dirección de avance (A).
Cada brazo inferior (5) está unido al chasis (2) por medio de una tercera articulación (11) y está unido al marco portador (4) por medio de una cuarta articulación (12). Las tercera y cuarta articulaciones (11, 12) presentan un eje de articulación sustancialmente horizontal y perpendicular a la dirección de avance (A). El brazo superior (6) está unido al chasis (2) por medio de una quinta articulación (13) de eje sustancialmente horizontal y perpendicular a la dirección de avance (A) y está unido al marco portador (4) por medio de una sexta articulación (14) de eje sustancialmente horizontal y perpendicular a la dirección de avance (A). El brazo superior (6) se extiende paralelamente a la dirección de avance (A), y las articulaciones (13 y 14) están dispuestas sustanclalmente en el plano vertical medio (7) de la máquina de trabajo del suelo (1).
Según una importante característica de la invención, cada accionador (8) se extiende, visto desde arriba, de manera inclinada con respecto al plano vertical medio (7) de la máquina de trabajo del suelo (1). Gracias a esta disposición de dichos accionadores (8), los esfuerzos laterales y verticales sobre el marco portador (4) son encajados por los accionadores (8) más que por la estructura del marco portador (4). La inclinación de los accionadores (8) permite estabilizar el marco portador (4). Los accionadores (8) encajan los esfuerzos laterales dirigidos transversalmente al marco portador (4). Dado que los accionadores (8) soportan una gran parte de los esfuerzos laterales, la Inercia de los componentes del marco portador (4) puede ser reducida según esta dirección. Así, se puede aligerar la estructura del marco portador (4). Los accionadores (8) aseguran la rigidez y la estabilidad del marco portador (4) en dinámica cuando el marco portador (4) pasa de una posición a otra, y a la inversa. Los accionadores (8) aseguran asimismo la estabilidad del marco portador (4) en estática cuando el marco portador (4) se extiende en una posición alta. Los accionadores (8) son unos gatos hidráulicos. Como los esfuerzos transitarán por los accionadores (8) inclinados, se podrá reducir la sección y el espesor de los brazos (5, 6) y, en particular, de los brazos inferiores (5), lo cual permite aligerar el marco portador (4) a la vez que éste tiene una buena resistencia a los esfuerzos. La inclinación de los accionadores (8) permite recuperar los esfuerzos perpendiculares al plano vertical... [Seguir leyendo]
Reivindicaciones:
1. Máquina de trabajo del suelo (1) con un marco portador (4) que comprende dos brazos Inferiores (5) y un brazo superior (6), siendo dicho marco portador (4) susceptible de pasar de una posición baja a una posición alta y a la inversa, por medio de dos accionadores (8), estando un accionador (8) asociado a un brazo inferior (5) y extendiéndose cerca de dicho brazo inferior (5), caracterizada por que cada accionador (8) se extiende, visto desde arriba, de manera inclinada con respecto al plano vertical medio (7) de dicha máquina de trabajo del suelo (1).
2. Máquina según la reivindicación 1, caracterizada por que cada accionador (8) está unido a dicho marco portador (4) y dicho chasis (2) por medio de articulaciones de rótula.
3. Máquina según la reivindicación 1 o 2, caracterizada por que en vista desde arriba, dichos accionadores (8) están dispuestos de manera simétrica con respecto a dicho plano vertical medio (7).
4. Máquina según cualquiera de las reivindicaciones 1 a 3, caracterizada por que dichos accionadores (8) son convergentes hacia atrás teniendo en cuenta la dirección de avance (A).
5. Máquina según cualquiera de las reivindicaciones 1 a 4, caracterizada por que dichos accionadores (8) de dicho marco portador (4) están dispuestos de manera que forman un trapecio.
6. Máquina según cualquiera de las reivindicaciones 1 a 5, caracterizada por que los accionadores (8) son unos gatos del tipo de doble efecto.
7. Máquina según cualquiera de las reivindicaciones 1 a 6, caracterizada por que cada brazo inferior (5) posee un espesor cuya inercia vertical es grande y cuya inercia transversal es pequeña.
8. Máquina según cualquiera de las reivindicaciones 1 a 7, caracterizada por que dichos brazos inferiores (5) se extienden, vistos desde arriba, de manera inclinada con respecto a dicho plano vertical medio (7).
9. Máquina según cualquiera de las reivindicaciones 1 a 8, caracterizada por que cada accionador (8) está unido a dicho chasis (2) por medio de una primera articulación (9), por que cada brazo inferior (5) está unido a dicho chasis (2) por medio de una tercera articulación (11), y por que dicha tercera articulación (11) se extiende, vista transversalmente, por encima y por delante de dicha primera articulación (9).
10. Máquina según las reivindicaciones 1 y 9, caracterizada por que cada brazo inferior (5) está unido a dicho marco portador (4) a través de una cuarta articulación (12), y por que en la posición alta de dicho marco portador (4), dicha cuarta articulación (12) se extiende por delante de un plano transversal (22) que pasa por dicha tercera articulación (11).
11. Máquina según la reivindicación 9 o 10, caracterizada por que en la posición alta de dicho marco portador (4), el marco de unión (18) de dicho marco portador (4) se extiende por delante de un plano transversal (22) que pasa por dicha tercera articulación (11).
12. Máquina según cualquiera de las reivindicaciones 1 a 11, caracterizada por que dichos accionadores (8) se extienden a uno y otro lado de dichos dos brazos inferiores (5).
13. Máquina según cualquiera de las reivindicaciones 1 a 12, caracterizada por que cada accionador (8) se extiende, en vista desde arriba, de manera sustancialmente paralela a dicho brazo inferior (5) correspondiente.
14. Máquina según cualquiera de las reivindicaciones 1 a 13, caracterizada por que el mando de dichos dos accionadores (8) se efectúa simultáneamente.
Patentes similares o relacionadas:
Sembradora con un rodillo integrado para destruir una cobertura vegetal, del 1 de Julio de 2020, de Kuhn SAS: Sembradora destinada a sembrar en presencia de una cobertura vegetal o de rastrojo y que comprende un bastidor que lleva unas herramientas […]
MÁQUINA PARA HORTICULTURA, del 2 de Abril de 2020, de MATILLAS ESCOBAR, José Ramón: Máquina para horticultura constituida a partir de un chasis portante en el que va montado un cajón basculante, que en su zona media […]
Sembradora con rodillo de asentamiento constituido por secciones desplazadas, del 26 de Febrero de 2020, de Kuhn SAS: Sembradora que comprende un bastidor que se apoya sobre el suelo por medio de por lo menos dos ruedas y que lleva un rodillo de asentamiento dispuesto […]
Máquina agrícola con un dispositivo de transmisión de movimiento secundario, del 25 de Diciembre de 2019, de Kuhn SAS: Máquina agrícola provista de por lo menos una herramienta accionada y que comprende, por un lado, un árbol de entrada montado rotativo en un cárter […]
Combinación de una herramienta primaria y de una herramienta secundaria y procedimiento de enganche, del 2 de Octubre de 2019, de KUHN S.A.: Combinación de una herramienta primaria y de una herramienta secundaria destinada a ser enganchada sobre la herramienta primaria mediante dos dispositivos […]
Aparato para aplicar un pesticida a cultivos perennes, del 2 de Mayo de 2018, de SUMITOMO CHEMICAL COMPANY, LIMITED: Un conjunto de aplicador para aplicar una sustancia activa a la zona de la raíz de una pluralidad de plantas, comprendiendo el conjunto de aplicador : un […]
Máquina de trabajo del suelo, del 27 de Septiembre de 2017, de PÖTTINGER Landtechnik GmbH: Máquina de trabajo del suelo para montar en un tractor, con un grupo de componentes de trabajo del suelo , como cultivador o grada de discos , que se puede apoyar […]
DESCONPACTADOR TETRAFUNCIÓN, del 3 de Noviembre de 2016, de FLORENSA FARRAN,IGNACIO: Maquina agrícola denominada DESCOMPACTADOR TETRAFUNCION versión tierras de vega o aluvión que permite la realización de 4 labores agrícolas diferentes en una misma aplicación, […]