Máquina de cinemática paralela teniendo una junta de dispositivos de ajuste con un cabezal posicionador.
Máquina de cinemática paralela (1) que comprende una junta (17) conectada a un dispositivo de ajuste (5) de la máquina,
donde el dispositivo de ajuste (5) está adaptado para mover en el espacio un cabezal posicionador (16) conectado a la máquina, caracterizada por que el dispositivo de ajuste (5) está montado alrededor de un soporte basculante (30, 106) para que pueda rotar alrededor de un eje de soporte basculante (50) donde el soporte basculante (30, 106) está montado a su vez para poder rotar alrededor de un eje principal (20) que se extiende a través de los medios de soporte del dispositivo de ajuste alrededor del soporte basculante (30, 106) y donde la junta (17) está dispuesta entre el dispositivo de ajuste (5) y el cabezal posicionador (16) o, alternativamente, entre el dispositivo de ajuste (5) y/o un bastidor (3) donde un extremo (31) del dispositivo de ajuste (5) está montado para poder rotar alrededor del soporte basculante (30, 106) que, a su vez, está montado, de modo que pueda rotar, en el cabezal posicionador (26) y/o el bastidor (3) para poder rotar alrededor de dicho eje principal (20), donde el eje del soporte basculante (50) y el eje principal (20) intersecan entre sí a un ángulo α, donde 1°≤ α ≤45°.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2004/011002.
Solicitante: PKMTRICEPT S.L.
Nacionalidad solicitante: España.
Inventor/es: NEUMANN, KARL-ERIK.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q1/54 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 1/00 Elementos componentes de la estructura general de un tipo de máquina, y más especialmente los elementos fijos más grandes (B23Q 37/00 tiene prioridad). › con sólo dos pares de rotación.
- B25J17/02 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
- F16C11/06 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16C ARBOLES; ARBOLES FLEXIBLES; MEDIOS MECANICOS PARA TRANSMITIR MOVIMIENTO EN UNA FUNDA FLEXIBLE; ELEMENTOS DE LOS MECANISMOS DEL CIGÜEÑAL; PIVOTES; UNIONES PIVOTANTES; PIEZAS ROTATIVAS DE INGENIERIA DISTINTAS A LAS PIEZAS DE TRANSMISION MECANICA, ACOPLAMIENTOS, EMBRAGUES O FRENOS; COJINETES. › F16C 11/00 Pivotes; Uniones pivotantes (disposición relativa de las articulaciones de la timonería de dirección B62D 7/16). › Articulaciones de rótula; Otras articulaciones que tienen más de un grado de libertad angular, es decir, juntas universales (juntas universales en las cuales la flexibilidad se logra con pivotes u órganos de unión deslizantes o rodantes F16D 3/16).
PDF original: ES-2457275_T3.pdf
Fragmento de la descripción:
Campo de la invención La presente invención se refiere a las máquinas de cinemática paralela del tipo trípode o hexápodo, y en particular a las juntas que conectan los dispositivos de ajuste de dichas máquinas a las máquinas propiamente dichas.
Fundamentos de la invención Los correspondientes dispositivos de ajuste de las máquinas de cinemática paralela comprenden, por ejemplo, un pistón movible axialmente en un cilindro que está sujeto por un extremo a un cabezal posicionador mediante una primera junta y a un bastidor mediante una segunda junta, siendo ambas juntas, juntas universales. Véase por ejemplo la patente SE 452 279 y su correspondiente especificación de Patente Europea 0202206. Estas juntas precisan dos grados de libertad en lo que respecta al movimiento del cabezal posicionador. Dado que el dispositivo de ajuste normalmente es un mecanismo de tornillo-tuerca se obtiene también un tercer grado de libertad en forma de movimiento giratorio de un componente del dispositivo de ajuste. Es preciso eliminar este grado de libertad para conseguir el desplazamiento axial. Las juntas conocidas hasta ahora y sus dispositivos de ajuste adoptan la forma de juntas de rótula esféricas con tres grados de libertad, comprendiendo dos movimientos angulares y un movimiento rotacional, donde un grado de libertad (el movimiento rotacional generado por el dispositivo de ajuste) está enclavado, bien en la junta propiamente dicha, o bien en el dispositivo de ajuste.
Otras juntas conocidas son juntas cardán universales que aunque tienen solo dos grados de libertad (dos movimientos angulares) son demasiado grandes y complicadas cuando se consigue la rigidez suficiente. Una máquina de cinemática paralela que posee estas juntas se muestra, por ejemplo, en la patente US6099217.
El inconveniente con estas juntas conocidas hasta ahora reside en la insuficiente rigidez de la junta y de los soportes de la junta, o en la complicación constructiva de la misma, resultando ambos factores en una disminución de las tolerancias con respecto al movimiento del cabezal posicionador.
Otro inconveniente que presentan las juntas conocidas es que tienden a ser excesivamente grandes cuando se las dota de la rigidez suficiente, factor que tiene un efecto limitante sobre la movilidad del cabezal posicionador.
Objeto de la invención El objeto de la presente invención es ofrecer una solución a estos problemas y presentar una máquina de cinemática paralela que comprende una junta del dispositivo de ajuste del tipo de las mencionadas anteriormente que posee un número de grados de libertad suficientes para el movimiento del cabezal posicionador, en una construcción de gran rigidez y que al mismo tiempo ahorre espacio.
Un tercer objeto es utilizar un tercer grado de libertad que se deriva de la rotación del dispositivo de ajuste como junta, en vez de eliminar este grado de libertad a través de la construcción de la junta.
Otro objeto de la invención es presentar una máquina de cinemática paralela que comprende una junta que permite elevadas tolerancias con respecto al movimiento del cabezal posicionador.
Otro objeto más de la invención es presentar una máquina de cinemática paralela que comprende una junta sencilla y económica desde el punto de vista técnico/productivo.
Resumen de la invención Estos objetivos son satisfechos por la presente invención, tal como se define en la reivindicación independiente. Las reivindicaciones dependientes que la acompañan permitirán ver las realizaciones convenientes de la invención.
Un dispositivo de ajuste es, por ejemplo, un mecanismo de tornillo y tuerca, donde el tornillo o la tuerca pueden sere también un pistón capaz de desplazarse axialmente dentro de un cilindro. A este respecto, la invención se refiere a una máquina de cinemática paralela que comprende una junta entre el dispositivo de ajuste y un cabezal posicionador y/o un bastidor de la máquina de cinemática paralela. Un extremo del pistón está montado de forma que pueda rotar alrededor del llamado soporte basculante que pivota alrededor de un eje de soporte basculante que se extiende a su través. El soporte basculante, a su vez, está montado para poder girar con respecto al cabezal posicionador y/o el bastidor, alrededor de un eje principal, intersecando ambos ejes a un ángulo fijo a, cumpliéndose que 1°º a º 45° y donde a es preferiblemente 5° º a º20°. El ángulo implica, pues, que el eje del soporte basculante basculará sobre el eje cuando el soporte basculante gira alrededor de dicho eje.
Según una primera realización, el soporte basculante adopta la forma de un árbol de soporte que gira alrededor de dicho eje principal y que tiene dos extremos, cada uno de los cuales está montado, de forma que pueda girar, en un alojamiento de un cojinete conectado, de forma fija, al cabezal posicionador y/o al bastidor. En este caso, el soporte basculante forma parte del árbol de soporte. Como alternativa a la primera realización, el soporte basculante puede adoptar la forma de una pieza que se acopla firmemente a dicho árbol de soporte pero que puede ser desmontada.
Según una segunda realización, el soporte basculante se monta, de modo que pueda girar, en un árbol de soporte que está firmemente sujeto al cabezal posicionador y/o al bastidor.
El soporte basculante incluye también una superficie de montaje de un cojinete externo o una superficie de cojinete externo en la que se monta el dispositivo de ajuste.
Además, cuando el dispositivo de ajuste se monta en el cabezal posicionador y/o en el bastidor, el ángulo fijo a se orienta con respecto al árbol de soporte de modo que se permita un movimiento de basculación entre el dispositivo de ajuste y el árbol de soporte en respuesta a la rotación del soporte basculante alrededor del eje principal.
Así pues, la rotación sobre el citado eje principal se produce, bien cuando el árbol de soporte, al que el soporte basculante está firmemente conectado, gira o cuando el soporte basculante gira sobre el árbol de soporte.
Otro resultado conseguido mediante la presente invención es que el movimiento rotacional relativamente largo del soporte basculante que tiene lugar cuando el dispositivo de ajuste bascula en su junta, hace posible el transporte eficaz de lubricante.
Aunque la junta tiene como principal fin conectar de forma móvil el dispositivo de ajuste al cabezal posicionador, la junta puede también constituir una junta para un segundo dispositivo de ajuste, proporcionando una conexión móvil entre el dispositivo de ajuste y el bastidor o armazón de la máquina.
Breve descripción de los dibujos A continuación se describirá la presente invención en mayor detalle haciendo referencia a ejemplos de realizaciones de la misma y a los dibujos que la acompañan, en los que:
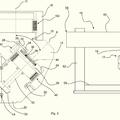
La figura 1: ilustra una máquina de cinemática paralela en forma de un trípode que incluye una junta según una primera realización de la invención;
La figura 2: es una vista desde arriba y a lo largo del dispositivo de la junta según la figura 1 únicamente, e ilustra la junta en su posición de partida a un ángulo de 0º alrededor del eje principal;
La figura 3: es una vista en sección del eje principal tomada sobre la línea A-A de la figura 2;
La figura 4: es una vista lateral de la junta según la figura 2, es decir, muestra la junta a un ángulo de 90º alrededor del eje principal;
La figura 5: es una vista en sección del eje principal tomada sobre la línea B-B de la figura 4;
La figura 6: es una vista superior según la figura 2 pero mostrando el dispositivo de ajuste inclinado un ángulo de 7º con respecto al eje principal;
La figura 7: es una vista en sección del eje principal tomada sobre la línea C-C de la figura 6;
La figura 8: es una vista lateral de la junta según la figura 6, es decir, con la junta a un ángulo de 90º alrededor del eje principal;
La figura 9: es una vista en sección del eje principal tomada sobre la línea D-D de la figura 8;
La figura 10: es una vista lateral de una junta correspondiente de acuerdo con una segunda realización de la invención, es decir, muestra la junta a un ángulo de 90º alrededor del eje principal;
La figura 11: es una vista en sección del eje principal tomada sobre la línea E-E de la figura 10;
La figura 12: ilustra desde arriba la junta según la figura 10 en una posición de partida a un ángulo de 0° alrededor del eje principal; y
La figura 13: es una vista en sección del eje principal tomada sobre la línea F-F de la figura 12.
Descripción de la invención La figura 1 ilustra una máquina de cinemática paralela 1 que... [Seguir leyendo]
Reivindicaciones:
1. Máquina de cinemática paralela (1) que comprende una junta (17) conectada a un dispositivo de ajuste (5) de la máquina, donde el dispositivo de ajuste (5) está adaptado para mover en el espacio un cabezal posicionador (16) conectado a la máquina, caracterizada por que el dispositivo de ajuste (5) está montado alrededor de un soporte basculante (30, 106) para que pueda rotar alrededor de un eje de soporte basculante (50) donde el soporte basculante (30, 106) está montado a su vez para poder rotar alrededor de un eje principal (20) que se extiende a través de los medios de soporte del dispositivo de ajuste alrededor del soporte basculante (30, 106) y donde la junta (17) está dispuesta entre el dispositivo de ajuste (5) y el cabezal posicionador (16) o, alternativamente, entre el dispositivo de ajuste (5) y/o un bastidor (3) donde un extremo (31) del dispositivo de ajuste (5) está montado para poder rotar alrededor del soporte basculante (30, 106) que, a su vez, está montado, de modo que pueda rotar, en el cabezal posicionador (26) y/o el bastidor (3) para poder rotar alrededor de dicho eje principal (20) , donde el eje del soporte basculante (50) y el eje principal (20) intersecan entre sí a un ángulo a, donde 1°ºaº45°.
2. Máquina de cinemática paralela (1) que comprende una junta (17) conectada a un dispositivo de ajuste (5) de la máquina según la reivindicación 1, caracterizada por que el eje del soporte basculante (50) y el eje principal (20) intersecan entre sí a un ángulo a, donde 5° ºa º20°.
3. Máquina de cinemática paralela (1) que comprende una junta (17) conectada a un dispositivo de ajuste (5) de la máquina según cualquiera de las reivindicaciones 1-2, caracterizada por que el soporte basculante (30, 106) incluye una superficie de montaje de cojinete externo (34) o una superficie de cojinete externo sobre la que se monta el dispositivo de ajuste (5) .
4. Máquina de cinemática paralela (1) que comprende una junta (17) conectada a un dispositivo de ajuste (5) de la máquina según cualquiera de las reivindicaciones 1-3, caracterizada por que el soporte basculante (30, 106) está firmemente conectado a un árbol de soporte (33) que tiene dos extremos (35, 36) que están conectados, de modo que puedan rotar, al cabezal posicionador (16) y/o al bastidor (3)
5. Máquina de cinemática paralela (1) de acuerdo con cualquiera de las reivindicaciones 1-4, caracterizada por que el soporte basculante (30, 106) está conectado, de modo que pueda rotar, a un árbol de soporte (33) que posee dos extremos (113, 114) de los que, al menos un extremo (114) está conectado al cabezal posicionador (16) y/o al bastidor (3) .
6. Máquina de cinemática paralela (1) que comprende una junta (17) conectada a un dispositivo de ajuste (5) de la máquina según la reivindicación 5, caracterizada porque un extremo (113) del árbol de soporte se inserta en un primer medio de montaje (102) de junta que está fijado axialmente mediante un acoplamiento de abrazadera (112) ; y por que el otro extremo (114) del árbol de soporte está firmemente conectado a un segundo medio de montaje (104) de junta.
7. Máquina de cinemática paralela (1) que comprende una junta (17) conectada a un dispositivo de ajuste (5) de la máquina, según cualquiera de las reivindicaciones 1-6, caracterizada por que el ángulo a se orienta con respecto al árbol de soporte (33) cuando el dispositivo de ajuste (5) está montado en el cabezal posicionador (16) y/o el bastidor (3) , para permitir la basculación entre el dispositivo de ajuste (5) y el soporte basculante (30, 106) mediante una rotación del soporte basculante (30, 106) sobre el eje principal (20) .
9
Patentes similares o relacionadas:
Máquina herramienta, del 11 de Marzo de 2020, de Hüttmann, Martin: Máquina herramienta para el mecanizado de piezas de trabajo controlado por ordenador, con un soporte de máquina y al menos dos dispositivos […]
Amortiguador de masa ajustado montado sobre cabezal simétrico, del 27 de Noviembre de 2019, de Fives Machining Systems, Inc: Un amortiguador de masa ajustado montado en un cabezal de máquina herramienta , montado sobre el extremo de un brazo que tiene una […]
Máquina herramienta para la mecanización por arranque de virutas de una pieza de trabajo así como conjunto de soporte de husillo para el empleo en una máquina herramienta de este tipo, del 6 de Noviembre de 2019, de DECKEL MAHO PFRONTEN GMBH: Conjunto de soporte de husillo para el empleo en una máquina herramienta, con: - una sección de alojamiento del brazo articulado que se puede disponer o bien […]
Cabezal de mecanización de giro doble, del 26 de Marzo de 2019, de C.M.S. S.P.A.: Cabezal de mecanización de giro doble con dos ejes controlados (C; A), que comprende: - una primera unidad de control de un primer […]
Máquina herramienta con sistema de amortiguación activa, del 6 de Febrero de 2019, de SORALUCE, S. COOP: Máquina herramienta con sistema de amortiguación activa, comprendiendo • un carnero que tiene una estructura prismática hueca con unas paredes longitudinales […]
 Máquina herramienta que comprende un cabezal de mecanizado, del 27 de Diciembre de 2018, de BRETON, S.P.A.: Máquina herramienta que comprende un manguito y un cabezal de mecanizado , comprendiendo dicho cabezal de mecanizado:
un primer cuerpo conectado al manguito […]
Máquina herramienta que comprende un cabezal de mecanizado, del 27 de Diciembre de 2018, de BRETON, S.P.A.: Máquina herramienta que comprende un manguito y un cabezal de mecanizado , comprendiendo dicho cabezal de mecanizado:
un primer cuerpo conectado al manguito […]
Manipulador de baja inercia para máquinas de corte láser para metales laminares planos, del 28 de Marzo de 2018, de SALVAGNINI ITALIA S.P.A.: Máquina de corte láser para metales laminares planos dispuestos en un plano horizontal, que comprende un cabezal de corte láser y un manipulador con un eje X de movimiento […]
Dispositivo para proporcionar aparatos de sujeción y/o de mecanizado y sistema, del 21 de Febrero de 2018, de ThyssenKrupp System Engineering GmbH: Dispositivo para proporcionar aparatos de sujeción y/o de mecanizado para un manipulador, en particular en una calle de fabricación para la fabricación de carrocerías […]