Instrumento quirúrgico motorizado.
Un instrumento quirúrgico (2000) para la colocación de grapas,
que comprende:
un conjunto de empuñadura (2010);
una primera parte endoscópica (2020a) que se puede conectar selectivamente a una parte distal del conjunto de empuñadura (2010) y que define un eje geométrico longitudinal, cuya primera parte endoscópica (2020a) incluye un miembro de accionamiento;
una segunda parte endoscópica (2020b) que se puede conectar selectivamente a la parte distal (2012) del conjunto de empuñadura (2010), incluyendo la segunda parte endoscópica (2020b) un elemento de accionamiento;
un primer efector de extremo (2030a) que se puede conectar selectivamente a una parte distal de la primera parte endoscópica (2020a), cuyo primer efector de extremo (2030a) está configurado para realizar una primera función de colocación de grapas; y
un segundo efector de extremo (2030b) que se puede conectar selectivamente a una parte distal de al menos uno de la primera parte endoscópica (2020a) y de la segunda parte endoscópica (2020b), cuyo segundo efector de extremo (2030b) está configurado para realizar una segunda función de colocación de grapas,
caracterizado por que
la primera parte endoscópica (2020a) incluye una parte alargada y una carcasa (2046) adyacente a la parte proximal de la misma, en donde la carcasa (2046) tiene un diámetro mayor que la parte alargada y un motor (2044) dispuesto en la carcasa (2046) de la primera parte endoscópica (2020a), estando el motor (2044) conectado operativamente al miembro de accionamiento para mover el miembro de accionamiento sustancialmente a lo largo del eje geométrico longitudinal.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12171845.
Solicitante: Covidien LP .
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 15 HAMPSHIRE STREET MANSFIELD, MA 02048 ESTADOS UNIDOS DE AMERICA.
Inventor/es: RACENET, DAVID C., ZEMLOK, MICHAEL A..
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/072 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › para aplicar una hilera de grapas en una sola operación.
- A61B17/115 A61B 17/00 […] › Grapadoras.
- A61B17/28 A61B 17/00 […] › Pinzas quirúrgicas (pinzas de biopsia A61B 10/06; forceps obstétricos A61B 17/44).
PDF original: ES-2548182_T3.pdf

Fragmento de la descripción:
Instrumento quirúrgico motorizado Antecedentes
Campo técnico
La presente divulgación se refiere a instrumentos quirúrgicos para sujetar tejido corporal y, con carácter más particular, a un instrumento quirúrgico motorizado que tiene un engranaje impulsor configurado para que se pueda mover con el fin de afectar a la rotación, a la articulación y al accionamiento del instrumento.
Antecedentes de la técnica relacionada con la invención Se conocen bien en la técnica los instrumentos quirúrgicos en los que el tejido en primer lugar se agarra o se abraza entre una estructura de mordazas opuestas y luego se une mediante elementos de sujeción quirúrgicos. En algunos instrumentos, se provee un bisturí para cortar el tejido que se ha unido mediante los elementos de sujeción. Los elementos de sujeción incluyen típicamente grapas quirúrgicas y elementos de sujeción de polímeros en dos piezas.
Los instrumentos destinados a este fin podrían incluir dos miembros alargados que se usen respectivamente para capturar o abrazar tejido. Típicamente, uno de los miembros porta un cartucho de grapas que aloja una pluralidad de grapas dispuestas en filas, mientras que el otro miembro tiene un yunque que define una superficie para formar las patas de las grapas a medida que las grapas se impulsan desde el cartucho de grapas. Varios instrumentos incluyen abrazaderas, empuñaduras o mandos para efectuar el accionamiento junto con la articulación y la rotación de un efector de extremo. Dichos instrumentos quirúrgicos pueden requerir que el usuario aplique una fuerza significativa en el accionamiento de las empuñaduras, mandos, etc., y requieran más de una mano para manejar el instrumento.
Sería conveniente disponer de instrumentos quirúrgicos con dispositivos de accionamiento que requieran menos esfuerzo para manejarlos. Adicionalmente, conviene también disponer de instrumentos quirúrgicos que realicen múltiples funciones en una operación con una sola mano.
El documento EP2377471 describe un instrumento quirúrgico motorizado que incluye una carcasa, una parte endoscópica, una parte de eje y un efector de extremo.
Sumario Los aspectos y realizaciones de la presente invención se describen en las reivindicaciones que se acompañan.
La presente divulgación también se refiere a un instrumento quirúrgico para la colocación de grapas que incluye un conjunto de empuñadura, una primera parte endoscópica, un motor y un primer efector de extremo. La primera parte endoscópica se puede conectar selectivamente a una parte distal del conjunto de empuñadura, define un eje geométrico longitudinal, incluye un alojamiento adyacente a una parte proximal del mismo e incluye un miembro de accionamiento. El motor está dispuesto en cooperación mecánica con el alojamiento de la primera parte endoscópica. El motor está conectado operativamente al miembro de accionamiento para mover al miembro de accionamiento sustancialmente a lo largo del eje geométrico longitudinal. El primer efector de extremo se puede conectar selectivamente a la parte distal de la primera parte endoscópica y está configurado para realizar una primera función de colocación de grapas.
La presente descripción también se refiere a un instrumento quirúrgico para la colocación de grapas que incluye un conjunto de empuñadura, una parte endoscópica y un conjunto de efector de extremo. El conjunto de empuñadura incluye una parte conductora dispuesta operativamente con el mismo. La parte endoscópica se puede conectar selectivamente a una parte distal del conjunto de empuñadura y define un eje geométrico longitudinal. El efector de extremo se puede conectar selectivamente a una parte distal de la parte endoscópica, y está configurado para realizar una función de colocación de grapas. El conjunto de empuñadura está configurado para conectarse selectiva y operativamente a una parte endoscópica controlable manualmente y a una parte endoscópica que incluye un motor en relación de asociación con la misma.
Descripción de los dibujos En la presente memoria se divulga una realización del instrumento quirúrgico motorizado que ahora se describe con referencia a los dibujos, en los que:
La Figura 1 es una vista en perspectiva de un instrumento quirúrgico motorizado según una realización de la presente divulgación;
La Figura 2 es una vista parcial en perspectiva y a escala ampliada del instrumento quirúrgico motorizado de la Figura 1;
La Figura 3 es una vista parcial en perspectiva y a escala ampliada del instrumento quirúrgico motorizado de las Figuras 1 y 2;
La Figura 4 es una vista parcial en perspectiva de los componentes internos del instrumento quirúrgico motorizado de las Figuras 1 a 3 según una realización de la presente divulgación;
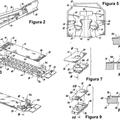
Las Figuras 5 y 6 son vistas parciales en perspectiva y en corte que muestran los componentes internos del instrumento quirúrgico motorizado de las Figuras 1 a 4 dispuesto en una primera posición;
La Figura 7 es una vista en corte transversal de los componentes internos del instrumento quirúrgico motorizado de las Figuras 1 a 5 dispuesto en una segunda posición;
La Figura 8A es una vista parcial en perspectiva que incluye una parte endoscópica del instrumento quirúrgico motorizado de las Figuras 1 a 7 según una realización de la presente divulgación;
La Figura 8B es una vista en perspectiva a escala ampliada de una parte del instrumento quirúrgico motorizado indicado en la Figura 8 A;
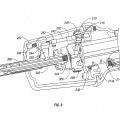
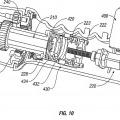
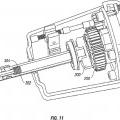
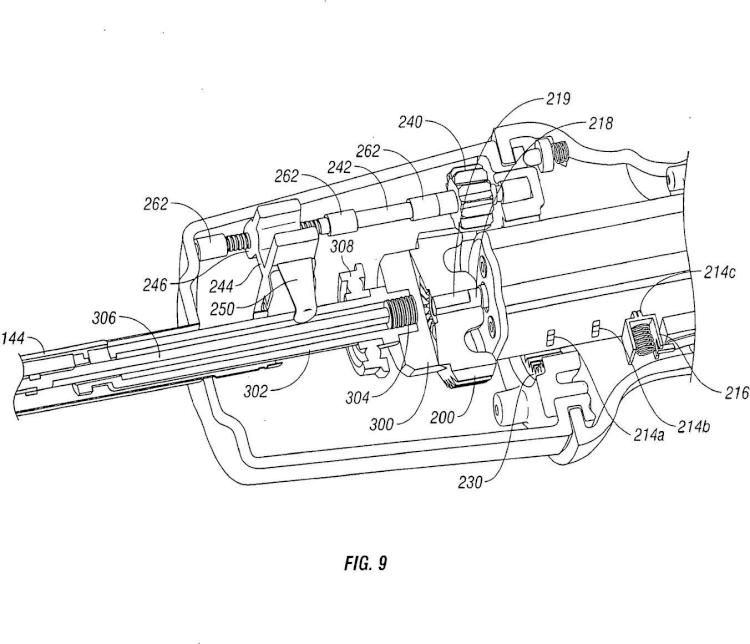
Las Figuras 9 a 11 son vistas parciales en perspectiva y en corte de los componentes internos del instrumento quirúrgico motorizado de las Figuras 1-8 dispuesto en una tercera posición;
Las Figuras 12 y 13 son vistas en perspectiva a escala ampliada de partes del instrumento quirúrgico motorizado de las Figuras 1 a 11 según una realización de la presente divulgación;
La Figura 14 es una vista en corte transversal de una parte del instrumento quirúrgico motorizado que incluye una parte de empuñadura según una realización de la presente divulgación;
Las Figuras 15A y 15B son vistas en perspectiva de un eje de articulación de la parte distal del instrumento quirúrgico motorizado de la Figura 1 según una realización de la presente divulgación;
La Figura 16 es una vista en perspectiva de un instrumento quirúrgico motorizado que tiene una parte de eje que se puede conectar selectivamente según una realización de la presente divulgación;
Las Figuras 17A a 17C son cada una vistas en perspectiva de un efector de extremo que tiene unos cartuchos circulares para grapas acoplados con una parte de eje, pudiéndose conectar cada parte de eje con el instrumento quirúrgico motorizado de la Figura 16;
La Figura 18 es una vista en perspectiva de un efector de extremo que tiene un miembro de mordazas paralelas acoplado con una parte de eje, cuya parte de eje se puede conectar con el instrumento quirúrgico motorizado de la Figura 16;
La Figura 19 es una vista posterior en perspectiva del instrumento quirúrgico accionado a motor de la Figura 16; y Las Figuras 20 y 21 son vistas parciales de conjunto de instrumentos quirúrgicos motorizados según realizaciones de la presente invención, cada una de cuyas vistas ilustra un conjunto de empuñadura y una parte endoscópica.
Descripción detallada de realizaciones A continuación se describen detalladamente realizaciones del instrumento quirúrgico motorizado presentemente divulgado con referencia a los dibujos, en los que los números de referencia similares designan elementos idénticos o correspondientes en cada una de las diversas vistas. Tal como se usa en la presente memoria, el término "distal" se refiere a la parte del instrumento quirúrgico motorizado, o de un componente del mismo, que esté más lejos del usuario, mientras que el término "proximal" se refiere a la parte del instrumento quirúrgico motorizado, o de un componente del mismo, que esté más cerca del usuario.
En las figuras se hace referencia a un instrumento quirúrgico motorizado, por ejemplo una grapadora quirúrgica, con el número 100 de referencia. Refiriéndose inicialmente a la Figura 1, el instrumento quirúrgico motorizado 100 incluye un alojamiento 110, una parte endoscópica 140 que define un eje geométrico longitudinal A-A que se extiende a través de ella, y un efector de extremo 160, que define un eje geométrico longitudinal B-B (ilustrado sustancialmente alineado con el eje geométrico A-A de la Figura 1) que se extiende a través del mismo. La parte endoscópica 140 se extiende distalmente desde el alojamiento 110, y un efector de extremo 160 está dispuesto junto a una parte distal 142 de la parte endoscópica 140.
Con... [Seguir leyendo]
Reivindicaciones:
1. Un instrumento quirúrgico (2000) para la colocación de grapas, que comprende:
un conjunto de empuñadura (2010) ;
una primera parte endoscópica (2020a) que se puede conectar selectivamente a una parte distal del conjunto de empuñadura (2010) y que define un eje geométrico longitudinal, cuya primera parte endoscópica (2020a) incluye un miembro de accionamiento;
una segunda parte endoscópica (2020b) que se puede conectar selectivamente a la parte distal (2012) del conjunto de empuñadura (2010) , incluyendo la segunda parte endoscópica (2020b) un elemento de accionamiento;
un primer efector de extremo (2030a) que se puede conectar selectivamente a una parte distal de la primera parte endoscópica (2020a) , cuyo primer efector de extremo (2030a) está configurado para realizar una primera función de colocación de grapas; y un segundo efector de extremo (2030b) que se puede conectar selectivamente a una parte distal de al menos uno de la primera parte endoscópica (2020a) y de la segunda parte endoscópica (2020b) , cuyo segundo efector de extremo (2030b) está configurado para realizar una segunda función de colocación de grapas, caracterizado por que la primera parte endoscópica (2020a) incluye una parte alargada y una carcasa (2046) adyacente a la parte proximal de la misma, en donde la carcasa (2046) tiene un diámetro mayor que la parte alargada y un motor (2044) dispuesto en la carcasa (2046) de la primera parte endoscópica (2020a) , estando el motor (2044) conectado operativamente al miembro de accionamiento para mover el miembro de accionamiento sustancialmente a lo largo del eje geométrico longitudinal.
2. El instrumento quirúrgico (2000) para la colocación de grapas de la reivindicación 1, en el que el primer efector de extremo (2030a) está montado de forma pivotante de tal manera que sea pivotable separándose del eje geométrico longitudinal.
3. El instrumento quirúrgico (2000) para la colocación de grapas de la reivindicación 1 o la reivindicación 2, en el que el primer efector de extremo (2030a) incluye un enlace de articulación dispuesto para su acoplamiento con el miembro de accionamiento, cuyo enlace de articulación se puede mover sustancialmente a lo largo del eje geométrico longitudinal para pivotar al primer efector de extremo (2030a) separándolo del eje geométrico longitudinal.
4. El instrumento quirúrgico (2000) para la colocación de grapas de una cualquiera de las reivindicaciones anteriores, en el que el alojamiento (2046) de la primera parte endoscópica (2020a) incluye un mando para que se pueda conectar de forma rotatoria al conjunto de empuñadura (2010) .
5. El instrumento quirúrgico (2000) para la colocación de grapas de una cualquiera de las reivindicaciones anteriores, en el que el alojamiento (2046) de la primera parte endoscópica (2020a) incluye un dispositivo de accionamiento conectado operativamente al miembro de accionamiento.
6. El instrumento quirúrgico (2000) para la colocación de grapas de una cualquiera de las reivindicaciones anteriores, en el que el primer efector de extremo (2030a) incluye un conjunto de yunque y un conjunto de cartucho de grapas, pudiéndose mover de forma pivotable al menos uno de entre el conjunto de yunque y el conjunto de cartucho de grapas uno con respecto al otro, y en el que el segundo efector de extremo (2030b) incluye un conjunto circular de colocación de grapas.
7. El instrumento quirúrgico (2000) para la colocación de grapas de una cualquiera de las reivindicaciones anteriores, en el que la primera parte endoscópica (2020a) puede rotar sustancialmente alrededor del eje geométrico longitudinal con respecto al conjunto de empuñadura (2010) .
8. El instrumento quirúrgico (2000) para la colocación de grapas de una cualquiera de las reivindicaciones anteriores, en el que la primera parte endoscópica (2020a) incluye un contacto para comunicar energía eléctrica con una parte conductora del conjunto de empuñadura (2010) .
9. El instrumento quirúrgico (2000) para la colocación de grapas de la reivindicación 8, en el que el alojamiento (2046) de la primera parte endoscópica (2020a) incluye un mando para permitir la rotación de la primera parte endoscópica (2020a) con respecto al conjunto de empuñadura (2010) , siendo circular la parte conductora del conjunto de empuñadura (2010) para permitir el contacto sustancialmente continuo entre la parte conductora y el contacto durante la rotación de la primera parte endoscópica (2020a) con respecto al conjunto de empuñadura (2010) .
Patentes similares o relacionadas:
 Estructura para la fijación de material de refuerzo a yunques y cartuchos de grapadoras quirúrgicas, del 29 de Julio de 2020, de Covidien LP (100.0%): Un efector final de una grapadora quirurgica, que comprende:
un par de mordazas que incluyen un cartucho de grapas y un yunque, el cartucho […]
Estructura para la fijación de material de refuerzo a yunques y cartuchos de grapadoras quirúrgicas, del 29 de Julio de 2020, de Covidien LP (100.0%): Un efector final de una grapadora quirurgica, que comprende:
un par de mordazas que incluyen un cartucho de grapas y un yunque, el cartucho […]
Adaptadores quirúrgicos para usar entre el conjunto de mango quirúrgico y las unidades de carga quirúrgica, del 22 de Julio de 2020, de Covidien LP (100.0%): Un conjunto adaptador para interconectar selectivamente una unidad de carga quirúrgica y un conjunto de mango que tiene al menos un […]
Aparatos de grapado quirúrgico, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aparato de grapado quirúrgico , que comprende: una carcasa que tiene un actuador ; un miembro alargado que se extiende desde la carcasa; […]
Conjunto de herramienta con espacio muerto mínimo, del 1 de Julio de 2020, de Covidien LP (100.0%): Un dispositivo de grapado quirúrgico que comprende: un cuerpo alargado ; y un conjunto de herramienta soportado en una porción distal […]
Recarga con sistema de estabilización de articulación, del 1 de Julio de 2020, de Covidien LP (100.0%): Una recarga para una grapadora quirúrgica configurada para acoplarse de manera liberable a un adaptador , dicha recarga que […]
Grapadora quirúrgica con mordaza expandible, del 13 de Mayo de 2020, de APPLIED MEDICAL RESOURCES CORPORATION: Una grapadora quirúrgica que comprende: un eje alargado , que tiene un extremo proximal y un extremo distal , y que define […]
Aparato de grapado quirúrgico, que incluye un aditamento de refuerzo, del 13 de Mayo de 2020, de Covidien LP (100.0%): Un aparato para unir dos secciones de órganos huecos con una matriz anular de grapas quirúrgicas, el aparato que comprende: un componente de cartucho de […]
Componente de disparo de uso en grapadora y grapadora, del 13 de Mayo de 2020, de Touchstone International Medical Science Co., Ltd: Un conjunto de disparo para una grapadora quirúrgica, que comprende: una carcasa ; una cámara de presión, que está […]