Sistema y procedimiento de inspección de superficies de estructuras micro y nanomecánicas.
Sistema de inspección de superficies dispuesto para detectar características de desplazamiento relativo y/o de vibración de diversos puntos de una pluralidad de elementos (51) que forman parte de una estructura mecánica (5),
comprendiendo dicho sistema:
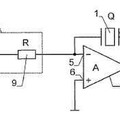
una fuente de luz (1) dispuesta para generar, al menos, un haz de luz (11);
un detector sensible a la posición (2) dispuesto para recibir el haz de luz cuando es reflejado fuera de la estructura mecánica (5) y para generar, al menos, una señal de salida en respuesta a la recepción de dicho haz de luz;
un sistema de control electrónico (3);
un medio de exploración (4) para el desplazamiento relativo de dicho haz de luz con relación a la estructura mecánica (5) con el fin de explorar dicha estructura mecánica con el haz de luz, siguiendo las instrucciones del sistema de control electrónico (3);
caracterizado porque
dicho sistema de control electrónico (3) está dispuesto para controlar el medio de exploración (4) con el fin de desplazar el haz de luz por la estructura mecánica a lo largo de una primera trayectoria (A) con objeto de detectar una pluralidad de posiciones de referencia subsiguientes (C), cada una en un elemento, a lo largo de dicha primera trayectoria (A), en el que dicho sistema de control electrónico (3) está asociado operativamente con dicho detector sensible a la posición (2) para determinar dichas posiciones de referencia (C) como resultado de un análisis de, al menos, una señal de salida de dicho detector sensible a la posición (2);
en el que dicho sistema de control electrónico (3) está dispuesto además para controlar el medio de exploración (4) para desplazar el haz de luz por la estructura mecánica a lo largo de una pluralidad de segundas trayectorias (B), estando asociada cada una de dichas segundas trayectorias (B) con una de dichas posiciones de referencia (C);
dicho sistema de control electrónico está dispuesto además para obtener, durante el desplazamiento del haz de luz a lo largo de cada una de dichas segundas trayectorias (B), una pluralidad de salidas de señales de posición de dicho detector sensible a la posición (2).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E05380157.
Solicitante: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC).
Nacionalidad solicitante: España.
Inventor/es: TAMAYO DE MIGUEL,FRANCISCO JAVIER, CALLEJA GÓMEZ,MONTSERRAT, MERTENS,JOHAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01Q10/06 FISICA. › G01 METROLOGIA; ENSAYOS. › G01Q TECNICAS O APARATOS DE SONDA DE BARRIDO; APLICACIONES DE TECNICAS DE SONDA DE BARRIDO, p. ej. MICROSCOPIA POR SONDA DE BARRIDO [SMP]. › G01Q 10/00 Disposiciones para barrido o posicionamiento, es decir, disposiciones para controlar de forma activa el movimiento o posición de la sonda. › Circuitos o algoritmos al efecto.
- G01Q20/02 G01Q […] › G01Q 20/00 Monitorización del movimiento o de la posición de la sonda. › por medios ópticos.
- G01Q70/06 G01Q […] › G01Q 70/00 Aspectos generales de las sondas SPM, de su fabricación o de su instrumentación relacionada, en tanto en cuanto no están adaptados a una única técnica SPM cubierta por el grupo G01Q 60/00. › Conjuntos de puntas de sondas.
PDF original: ES-2546789_T3.pdf
Fragmento de la descripción:
Sistema y procedimiento de inspección de superficies de estructuras micro y nanomecánicas Campo de la invención La invención se refiere al campo de los dispositivos basados en estructuras micro o nanomecánicas, como son los micro o nanovoladizos, los micro o nanopuentes, las micro o nanomembranas, etc.
Estado de la técnica
Existe un interés cada vez mayor por los sistemas y procedimientos basados en elementos micromecánicos y nanomecánicos (H.G. Craighead, "Nanoelectromechanical systems", Science 290, páginas 1532-1535 (2000) ) . Los sistemas microelectromecánicos (MEMS) y los dispositivos basados en microvoladizo son dos ejemplos relevantes de este tipo de sistemas. Si mencionamos algunas aplicaciones, los acelerómetros MEMS se emplean en exploraciones y supervisiones símicas, la detección en airbag de automóviles y la navegación inercial. Se emplean tecnologías similares para monitorizar la presión sanguínea. Se han desarrollado microespejos MEMS como interruptores fotónicos para el sector de las telecomunicaciones ópticas; los microespejos también pueden emplearse para pantallas portátiles y aplicaciones de colocación de rayos láser. Los MEMS también pueden emplearse como transductores en sensores biológicos y químicos. Existe también una amplia gama de aplicaciones basadas en los microvoladizos, que pueden considerarse como una de las formas más simples de los MEMS. Por ejemplo, los microvoladizos se utilizan para el mapeado sensible de fuerzas de atracción y repulsión a escala nanoraétrica en microscopia de fuerzas atómicas (Y. Martin, C.C. Williams y H.K. Wickramasinghe, «Atomic Force Microscope-Force Mapping and Profiling on a sub 100-A scale», Journal of Applied Physics 61, págs. 4723-4729 (1987) , para sensores biológicos y químicos nanomecánicos ultrasensibles (B. Ilic, D. Czaplewski, H.G. Craighead, P. Neuzil, C. Campagnolo y C. Battf «Mechanical resonant immunospecific biological detector», Applied Physics Letters 77, págs. 450-452 (2000) , para la detección de partículas cargadas (A.C. Stephan, T. Gaulden, A. -D. Brovm, M. Smith, L.F. Miller y T. Thundat, «Microcantilever charged-particle flux detector» Review of Scientific Instruments 73, págs. 36-41 (2002) ) , para escritura y lectura de almacenamiento de datos de densidad ultra alta (P. Vettiger et al, «Ultrahigh density, high-data-rate NEMS-based AFM data storage system», Microelectronics Engineering 46, págs. 11-17 (1999) .
La caracterización de la forma, perfil, movimiento, tensión y esfuerzo de los MEMS y los microvoladizos desempeña un papel importante en el desarrollo y evolución de los productos. Además, la medida en tiempo real de la forma, perfil, movimiento, tensión y/o esfuerzo es de gran valor para monitorizar la respuesta mecánica, por ejemplo, de sensores químicos y biológicos que se basan en la forma, perfil, movimiento, tensión o esfuerzo de un MEMS o micro o nanovoladizos.
Los MEMS y los sistemas microvoladizo incluyen sistemas basados en voladizos provistos de un extremo fijo y otro extremo móvil; en estos sistemas, lo que se detecta normalmente es el desplazamiento y/o movimiento del extremo "libre". Sin embargo, existen también sistemas basados en voladizos sujetos por ambos extremos; entonces, el movimiento de la parte central puede ser detectado. Además, existen otras estructuras micro y nanomecánicas que son móviles y flexibles, como son las paletas sujetas doblemente cuya dirección de movimiento "fácil" se corresponde con la torsión de la paleta alrededor del eje de las bisagras que conectan la paleta a un armazón (sustancialmente, igual que una raqueta cuadrada fijada a un armazón mediante dos asas opuestas de la raqueta, extendiéndose a lo largo de un eje) . Otros sistemas conocidos emplean membranas que están conectadas a un armazón mediante dos grupos de bisagras, lo que permite dos grados angulares de libertad.
En sensores químicos/biológicos basados en MEMS y microvoladizos, la superficie del elemento micro o nanomecánico está sensibilizada con receptores que reconocen selectivamente la sustancia objetivo. La colocación de la sustancia objetivo sobre la superficie del elemento micro o nanomecánico produce un cambio de la forma, perfil, tensión, esfuerzo y movimiento (vibración) del elemento mecánico. Este cambio suele medirse midiendo el desplazamiento de una parte representativa del elemento mecánico (normalmente se trata del extremo libre de un microvoladizo fijado por un solo extremo, pero también puede ser el centro de un microvoladizo fijado por ambos extremos, una parte de una lámina membranosa, etc.) . Este desplazamiento puede ser de unos 1-100 nanómetros y, en muchos casos, es necesario obtener una resolución superior a 1 nm, dependiendo de la aplicación. Para la lectura del desplazamiento, existen varias técnicas como la detección capacitiva, detección basada en túnel de corriente, interferometría óptica, lectura piezorresistente y la técnica de deflexión de un haz óptico.
Ejemplos de MEMS y sistemas microvoladizo son revelados, por ejemplo, en:
Engel y otros «Trends in Cell Biology», Volumen 9, Febrero de 1999, páginas 77-80, "Atomic force microscopy: a powerful tool to observe biomolecules at work".
P. Vettiger et al, IBM J. Res. Develop., Volumen 44, Número 3, May 2000, páginas 323-339. "The miliipedemore than one thousand tips for future AFM storage"
WO-A-01/33226
WO-A-03/091458
El procedimiento de deflexión de haz óptico es el más sensible y presenta la ventaja de que puede implementarse fácilmente. La figura 1 ilustra de manera esquemática un sistema convencional de arte previo para la deflexión de haz óptico. Una fuente de luz 101 (normalmente un fuente láser) produce un haz de luz 102 (normalmente un haz de luz láser, en el espectro visible ultravioleta o infrarrojo) que es enfocado (es decir, enfocado directamente o a través de medios de dirección que implican, por ejemplo, uno o más espejos 103, etc.) sobre la parte del elemento mecánico donde ha de medirse el desplazamiento, por ejemplo, sobre el extremo de un microvoladizo 104. La deflexión del haz que se refleja del voladizo se mide con un detector sensible a la posición 105 (tal como un fotodetector, por ejemplo, un fotodetector segmentado, un fotodetector de captación continua de la posición, una matriz de fotodetectores, un CCD, etc.) . Por ejemplo, puede emplearse un fotodetector segmentado que se divide en dos segmentos orientados en paralelo al eje de movimiento del voladizo. La deflexión del voladizo produce un desplazamiento del punto de láser reflejado sobre el fotodetector. Así, la diferencia de fotocorrientes entre los dos segmentos es proporcional a la deflexión del voladizo. Asimismo, la técnica de deflexión del haz óptico puede aplicarse a otros tipos de elementos mecánicos como son los voladizos fijados por ambos extremos, láminas membranosas, micropaletas, etc. Igualmente, puede ser aplicado para la lectura de otros tipos de desplazamientos en lugar de los desplazamientos fuera de plano, como movimientos torsionales de los microvoladizos y micropaletas, etc. (G. Meyer and N.M. mer, "Simultaneous measurement of lateral and normal forces with an optical-beamdeflection atomic force microscope", Applied Physics Letters, vol. 57, pp. 2089-2091) .
Este sistema es adecuado para medir el comportamiento estático y mecánico de los elementos mecánicos como los voladizos, por ejemplo, la deflexión máxima, el valor medio de deflexión, la amplitud a una frecuencia de referencia (el elemento puede ser excitado externamente mediante un fuerza de excitación que oscile a la frecuencia de referencia) , la etapa del movimiento con respecto a la seña de excitación externa, la frecuencia, etc. El desplazamiento estático, la amplitud, la frecuencia, etc. que se hayan medido pueden relacionarse entonces con un objeto que se tenga que medir y que interactúe con el voladizo y con señales y/o procedimientos empleados para estimular el objeto y/o voladizo.
Ahora bien, la técnica descrita anteriormente es práctica cuando se tenga que medir el desplazamiento/movimiento de una sola parte de un único elemento mecánico. Sin embargo, esta técnica no puede aplicarse a dispositivos basados en matrices que comprendan una pluralidad de elementos mecánicos en los que haya que medir el desplazamiento/movimiento de cada elemento. Estos dispositivos ofrecen multifuncionalidad y mayor velocidad y/o una información más completa que los dispositivos basados en un solo elemento mecánico. Por ejemplo, los sensores químicos y biológicos basados en matrices de microvoladizos pueden detectar varias sustancias sensibilizando cada voladizo con un receptor diferente. Además, puede resultar ventajoso obtener información sobre... [Seguir leyendo]
Reivindicaciones:
1. Sistema de inspección de superficies dispuesto para detectar características de desplazamiento relativo y/o de vibración de diversos puntos de una pluralidad de elementos (51) que forman parte de una estructura mecánica (5) , comprendiendo dicho sistema:
una fuente de luz (1) dispuesta para generar, al menos, un haz de luz (11) ;
un detector sensible a la posición (2) dispuesto para recibir el haz de luz cuando es reflejado fuera de la estructura mecánica (5) y para generar, al menos, una señal de salida en respuesta a la recepción de dicho haz de luz;
un sistema de control electrónico (3) ;
un medio de exploración (4) para el desplazamiento relativo de dicho haz de luz con relación a la estructura mecánica (5) con el fin de explorar dicha estructura mecánica con el haz de luz, siguiendo las instrucciones del sistema de control electrónico (3) ;
caracterizado porque dicho sistema de control electrónico (3) está dispuesto para controlar el medio de exploración (4) con el fin de desplazar el haz de luz por la estructura mecánica a lo largo de una primera trayectoria (A) con objeto de detectar una pluralidad de posiciones de referencia subsiguientes (C) , cada una en un elemento, a lo largo de dicha primera trayectoria (A) , en el que dicho sistema de control electrónico (3) está asociado operativamente con dicho detector sensible a la posición (2) para determinar dichas posiciones de referencia (C) como resultado de un análisis de, al menos, una señal de salida de dicho detector sensible a la posición (2) ;
en el que dicho sistema de control electrónico (3) está dispuesto además para controlar el medio de exploración (4) para desplazar el haz de luz por la estructura mecánica a lo largo de una pluralidad de segundas trayectorias (B) , estando asociada cada una de dichas segundas trayectorias (B) con una de dichas posiciones de referencia (C) ;
dicho sistema de control electrónico está dispuesto además para obtener, durante el desplazamiento del haz de luz a lo largo de cada una de dichas segundas trayectorias (B) , una pluralidad de salidas de señales de posición de dicho detector sensible a la posición (2) .
2. Sistema de acuerdo con la reivindicación 1, en el que el sistema de control electrónico (3) está asociado operativamente con dicho detector sensible a la posición (2) para determinar dichas posiciones de referencia (C)
como resultado de un análisis de la amplitud de dicha, al menos, una señal de salida de dicho detector sensible a la posición (2) .
3. Sistema de acuerdo con la reivindicación 2, en el que el sistema de control electrónico (3) está asociado operativamente con dicho detector sensible a la posición (2) para determinar que una posición es una posición de referencia cuando dicha posición se corresponda con un máximo local de la amplitud de dicha, al menos, una señal de salida de dicho detector sensible a la posición (2) .
4. Sistema de acuerdo con la reivindicación 2, en el que el sistema de control electrónico (3) está asociado operativamente con dicho detector sensible a la posición (2) para determinar que una posición es una posición de referencia cuando dicha posición se corresponda con un mínimo local de la amplitud de dicha, al menos, una señal de salida de dicho detector sensible a la posición (2) .
5. Sistema de acuerdo con la reivindicación 2, en el que el sistema de control electrónico (3) está asociado operativamente con dicho detector sensible a la posición (2) para determinar que una posición es una posición de referencia cuando dicha posición se corresponda con un máximo local de inclinación de la amplitud de dicha, al menos, una señal de salida de dicho detector sensible a la posición (2) .
6. Sistema de acuerdo con la reivindicación 2, en el que el sistema de control electrónico (3) está asociado 45 operativamente con dicho detector sensible a la posición (2) para determinar que una posición es una posición de referencia cuando dicha posición se corresponda con una posición que tiene una relación especificada con las posiciones correspondientes a máximos y/o mínimos locales de la amplitud de dicha, al menos, una señal de salida de dicho detector sensible a la posición (2) .
7. Sistema de acuerdo con cualquiera de las reivindicaciones 2-6, en el que la amplitud de dicha, al menos, una 50 señal de salida de dicho detector sensible a la posición (2) es indicativa de la intensidad del haz de luz recibido, por dicho detector sensible a la posición (2) .
8. Sistema de acuerdo con cualquiera de las reivindicaciones anteriores, en el que dicho sistema de control electrónico está dispuesto para:
desplazar el haz de luz a lo largo de dicha primera trayectoria (A) ;
al detectar una posición de referencia (C) , interrumpir el desplazamiento del haz de luz a lo largo de dicha primera trayectoria (A) y, en su lugar, desplazar el haz de luz a lo largo de una segunda trayectoria (B) correspondiente a dicha posición de referencia (C) ; subsecuentemente continuar el desplazamiento del haz
de luz a lo largo de dicha primera trayectoria (A) hasta detectar una posición de referencia (C) subsecuente.
9. Sistema de acuerdo con cualquiera de las reivindicaciones 1-7, en el que dicho sistema de control electrónico (3) está dispuesto para:
desplazar el haz de luz por dicha primera trayectoria (A) hasta alcanzar un extremo de dicha primera trayectoria (A) , mientras registra subsecuentes posiciones de referencia (C) ;
posteriormente, tras alcanzar el extremo de dicha primera trayectoria (A) , desplazando subsecuentemente el haz de luz por las segundas trayectorias (B) correspondientes a las posiciones de referencia registradas (C) .
10. Sistema de acuerdo con cualquiera de las reivindicaciones anteriores, en el que dichas segundas trayectorias (B) incluyen un sustancial número de puntos de cada elemento o una región de cada elemento con el fin de obtener un gráfico general de la superficie de la pendiente, el desplazamiento y/o la vibración de dicho elemento 15 o dicha región de dicho elemento.
11. Sistema de acuerdo con cualquiera de las reivindicaciones anteriores, en el que la primera trayectoria (Á) es sustancialmente una trayectoria recta en una primera dirección.
12. Sistema de acuerdo con cualquiera de las reivindicaciones anteriores, en el que dichas segundas trayectorias
(B) son trayectorias sustancialmente rectas en dirección sustancialmente perpendicular a la primera trayectoria 20 (A) .
13. Sistema de acuerdo con las reivindicaciones 1-11, en el que dichas segundas trayectorias (B) son sustancialmente trayectorias rectas en dirección sustancialmente paralelo a la primera trayectoria (A) .
14. Sistema de acuerdo con cualquiera de las reivindicaciones 1-10, en el que la primera y/o segundas trayectorias son trayectorias sinuosas y/o zigzagueantes.
15. Sistema de acuerdo con cualquiera de las reivindicaciones anteriores, en el que la estructura mecánica (5) es una matriz de voladizos y en el que los elementos (51) son voladizos de dicha matriz de voladizos.
16. Sistema de acuerdo con cualquiera de las reivindicaciones anteriores, estando dispuesto dicho sistema además para almacenar y/o tratar dichas salidas de señales de posición como datos indicativos de características de desplazamiento y/o vibración de la superficie de un correspondiente elemento (51) de la estructura mecánica (5) , a lo largo de las correspondientes segundas trayectorias (B) .
17. Procedimiento de inspección de superficies para detectar características de desplazamiento relativo y/o de vibración de diversos puntos de una pluralidad de elementos (51) que forman parte de una estructura mecánica (5) , comprendiendo dicho procedimiento de las etapas de:
dirigir un haz de luz (11) hacia dicha estructura mecánica y producir un desplazamiento relativo de dicho haz
de luz con respecto a la estructura mecánica (5) para escanear dicha estructura mecánica con el haz de luz; recibir un haz de luz reflejado por dicha estructura mecánica, con un detector sensible a la posición (2) dispuesto para producir al menos una señal de salida en respuesta a la recepción de dicho haz de luz;
en el que la etapa de producir un desplazamiento relativo de dicho haz de luz con respecto a la estructura mecánica (5) se realiza de manera que el haz de luz es desplazado a lo largo de la estructura mecánica a lo largo de una primera trayectoria (A) , comprendiendo también el procedimiento la etapa de detectar una pluralidad de posiciones subsecuentes de referencia (C) , cada una en un elemento, a lo largo de dicha primera trayectoria (A) , determinándose dichas posiciones de referencia (C) mediante el análisis de al menos una señal de salida de dicho detector sensible a la posición (2) ;
caracterizado porque 45 la etapa de producir un desplazamiento relativo de dicho haz de luz con respecto a la estructura mecánica se realiza además para desplazar igualmente el haz de luz a lo largo de la estructura mecánica a lo largo de una pluralidad de segundas trayectorias (B) , estando cada una de dichas segundas trayectorias (B) asociada con una de dichas posiciones de referencia (C) ; en el que el procedimiento incluye además la obtención, durante el desplazamiento del haz de luz a lo largo de cada una de dichas segundas trayectorias 50 (B) , de una pluralidad de salidas de señales de posición de dicho detector sensible a la posición (2) .
18. Procedimiento de acuerdo con la reivindicación 17, en el que dichas posiciones de referencia (C) son determinadas mediante el análisis de la amplitud de dicha, al menos, una señal de salida de dicho detector
sensible a la posición (2) .
19. Procedimiento de acuerdo con la reivindicación 18, en el que se determina que una posición es una posición de referencia cuando dicha posición se corresponde con un máximo local de la amplitud de dicha, al menos, una señal de salida de dicho detector sensible a la posición (2) .
20. Procedimiento de acuerdo con la reivindicación 18, en el que se determina que una posición es una posición de referencia cuando dicha posición se corresponde con un mínimo local de la amplitud de dicha, al menos, una señal de salida de dicho detector sensible a la posición (2) .
21. Procedimiento de acuerdo con la reivindicación 18, en el que se determina que una posición es una posición de referencia cuando dicha posición se corresponde con un máximo local de la pendiente de la amplitud de dicha, al menos, una señal de salida de dicho detector sensible a la posición (2) .
22. Procedimiento de acuerdo con la reivindicación 18, en el que se determina que una posición es una posición de referencia cuando dicha posición se corresponde con una posición que guarda una relación especificada con posiciones correspondientes a máximos y/o mínimos locales de la amplitud de dicha, al menos, una señal de salida de dicho detector sensible a la posición (2) .
23. Procedimiento de acuerdo con cualquiera de las reivindicaciones 17-22, en el que la amplitud de dicha, al menos, una señal de salida de dicho detector sensible a la posición (2) es indicativa de la intensidad del haz de luz recibido por el detector sensible a la posición (2) .
24. Procedimiento de acuerdo con cualquiera de las reivindicaciones 17-23, en el que la etapa de producción de un desplazamiento relativo de dicho haz de luz con relación a la estructura mecánica (5) se realiza de modo que:
el haz de luz es desplazado a lo largo de dicha primera trayectoria (A) ;
al detectar una posición de referencia (C) , el desplazamiento del haz de luz a lo largo de dicha primera trayectoria (A) es interrumpido y, en su lugar, el haz de luz es desplazado a lo largo de una segunda trayectoria (B) correspondiente a dicha posición de referencia (C) ;
subsecuentemente, se continúa con el desplazamiento del haz de luz por dicha primera trayectoria hasta detectar una subsecuente posición de referencia (C) .
25. Procedimiento de acuerdo con cualquiera de las reivindicaciones 17-23, en el que la etapa de producción de un desplazamiento relativo de dicho haz de luz con relación a la estructura mecánica (5) se realiza de modo que:
el haz de luz es desplazado por dicha primera trayectoria (A) hasta alcanzar un extremo de dicha primera trayectoria (A) , mientras son registradas subsecuentes posiciones de referencia (C) ;
posteriormente, tras alcanzar el extremo de dicha primera trayectoria (A) , el haz de luz es desplazado subsecuentemente a lo largo de las segundas trayectorias (B) correspondientes a las posiciones de referencia registradas (C) .
26. Procedimiento de acuerdo con cualquiera de las reivindicaciones 17-25, en el que dichas segundas trayectorias
(B) incluyen un sustancial número de puntos de cada elemento o una región de cada elemento con el fin de obtener un gráfico general de la superficie de la pendiente, el desplazamiento y/o la vibración de dicho elemento
27. Procedimiento de acuerdo con cualquiera de las reivindicaciones 17-26, en el que la primera trayectoria (A) es una trayectoria sustancialmente recta en una primera dirección. 28. Procedimiento de acuerdo con las reivindicaciones 17-27, en el que dichas segundas trayectorias (B) son sustancialmente trayectorias rectas en dirección sustancialmente perpendicular a la primera trayectoria (A) . 29. Procedimiento de acuerdo con las reivindicaciones 17-27, en el que dichas segundas trayectorias (B) son trayectorias sustancialmente rectas en dirección sustancialmente paralela a la primera trayectoria (A) . 30. Procedimiento de acuerdo con cualquiera de las reivindicaciones 17-26, en el que la primera y/o segundas trayectorias son trayectorias sinuosas y/o zigzagueantes. 31. Procedimiento de acuerdo con cualquiera de las reivindicaciones 17-30, en el que la estructura mecánica (5) es una matriz de voladizos y en el que los elementos (51) son voladizos de dicha matriz de voladizos. 32. Procedimiento de acuerdo con cualquiera de las reivindicaciones 17-31, comprendiendo además la etapa de almacenar y/o tratar dichas señales de salida de posición como datos indicativos de características de desplazamiento y/o vibración de la superficie de un correspondiente elemento (51) de la estructura mecánica (5) , a lo largo de las correspondientes segundas trayectorias (B) . 33. Programa que comprende instrucciones de programa para hacer que un sistema electrónico programable lleve a cabo el procedimiento de acuerdo con cualquiera de las reivindicaciones 17-32, cuando el programa es ejecutado en dicho sistema electrónico programable. 34. Programa de acuerdo con la reivindicación 33, integrado en un soporte de grabación. o dicha región de dicho elemento.
Patentes similares o relacionadas:
MÉTODO DINAMICO DE MICROSCOPÍA DE FUERZAS Y MICROSCOPIO PARA ADQUIRIR DE FORMA SIMULTANEA IMÁGENES DE TOPOGRAFIA Y MAPAS DE FUERZA, del 28 de Noviembre de 2019, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS: Método dinámico de microscopía de fuerzas para adquirir imágenes de superficies, determinar de forma directa la fuerza ejercida sobre un material que permite, […]
MÉTODO DINÁMICO DE MICROSCOPIA DE FUERZAS Y MICROSCOPIO PARA ADQUIRIR DE FORMA SIMULTÁNEA IMÁGENES DE TOPOGRAFIA Y MAPAS DE FUERZA, del 25 de Noviembre de 2019, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS: Método dinámico de microscopia de fuerzas y microscopio para adquirir de forma simultanea imágenes de topografía y mapas de fuerza. Método dinámico […]
 Microscopio de sonda de barrido con accionador controlado por corriente, del 1 de Marzo de 2013, de SPECS ZURICH GMBH: Un microscopio de sonda de barrido que comprende
una sonda ,
un accionador piezoeléctrico para hacer oscilar la sonda ,
un amplificador invertido […]
Microscopio de sonda de barrido con accionador controlado por corriente, del 1 de Marzo de 2013, de SPECS ZURICH GMBH: Un microscopio de sonda de barrido que comprende
una sonda ,
un accionador piezoeléctrico para hacer oscilar la sonda ,
un amplificador invertido […]