Gestión inteligente de la potencia durante una caída de tensión en los aerogeneradores.
La presente invención se refiere a un método para reducir una carga mecánica si se produce una caída de tensión en los aerogeneradores.
El controlador del generador del aerogenerador y la unidad de control del convertidor funcionan en combinación para controlar la oscilación generada por una caída de tensión en el aerogenerador 100. El método aplica una rampa a la recuperación de potencia para permitir las oscilaciones de la amortiguación mejorada del DTD antes de que se alcance el pico de par. El método incluye el paso de: proporcionar un valor de potencia activa máximo por parte de la unidad de control del convertidor al controlador del generador del aerogenerador. El paso siguiente consiste en establecer un valor de saturación para las consignas a fin de mejorar los límites del tren de potencia. En el paso siguiente, se aplica una rampa a las consignas de potencia del generador del aerogenerador. Y finalmente se aplica una amortiguación mejorada del tren de potencia al valor aumentado de la potencia para reducir la carga mecánica en el aerogenerador y amortiguar la oscilación en el generador del aerogenerador.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201300728.
Solicitante: GAMESA INNOVATION & TECHNOLOGY, S.L.
Nacionalidad solicitante: España.
Inventor/es: GARCIA ANDUJAR,JUAN CARLOS, LOPEZ RUBIO,JOSE MARIA, JIMENEZ BUENDIA,Francisco.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F03D7/04 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F03 MAQUINAS O MOTORES DE LIQUIDOS; MOTORES DE VIENTO, DE RESORTES, O DE PESOS; PRODUCCION DE ENERGIA MECANICA O DE EMPUJE PROPULSIVO O POR REACCION, NO PREVISTA EN OTRO LUGAR. › F03D MOTORES DE VIENTO. › F03D 7/00 Control de los motores de viento (alimentación o distribución de energía eléctrica H02J, p. ej. disposiciones para ajustar, eliminar o compensar la potencia reactiva en las redes H02J 3/18; control de generadores eléctricos H02P, p. ej. disposiciones para el control de generadores eléctricos con el propósito de obtener las características deseadas en la salida H02P 9/00). › Control automático; Regulación.
Fragmento de la descripción:
GESTIÓN INTELIGENTE DE LA POTENCIA DURANTE UNA CAÍDA DE TENSIÓN EN LOS
AEROGENERADORES
CAMPO DE LA INVENCION
La presente invención está relacionada en genera! con aerogeneradores, y más concretamente, con un método para reducir las cargas mecánicas por medio de una gestión inteligente de !a potencia durante las caídas de tensión de los aerogeneradores.
ANTECEDENTES DE LA EXPOSICIÓN
Un aerogenerador convierte la energía cinética del viento en energía eléctrica que a continuación es transmitida a una subestación de un parque eólico. En general, en un aerogenerador, una góndola alberga los componentes así como un tren de potencia para convertir la energía mecánica en electricidad. El tren de potencia de un aerogenerador normalmente consiste en el montaje de un rotor, eje del rotor, multiplicadora, eje de la multiplicadora, acoplamiento y generador. Los aerogeneradores están diseñados para soportar varios escenarios de funcionamiento sobre el terreno (funcionamiento normal, rachas extremas, pérdida de la red, bloqueo de las palas, etc.).
En la actualidad, el impacto de los aerogeneradores sobre la red ya no es inapreciable por lo que los operadores de red están endureciendo los requisitos de conexión a la red de los aerogeneradores. Algunos de estos requisitos se definen en términos de las caídas de tensión que deben soportar los aerogeneradores sin desconectarse de la red, y el tiempo máximo para recuperar la producción de potencia después de que la red se recupere de la caída.
El escenario de caída de tensión es uno de los casos operativos más difíciles para un aerogenerador.. Cuando ocurre una caída de tensión en la red se produce un transitorio que no solo afecta ai rendimiento eléctrico del aerogenerador sino también al rendimiento mecánico. En caso de una perturbación en la red, cuando la tensión queda por debajo de un determinado valor, se debe reducir la producción de potencia del aerogenerador debido a restricciones eléctricas. Como la dinámica de una
caída de tensión es muy rápida, esta reducción se debe realizar de un modo muy brusco. La única manera de obtener esta reducción en un corto periodo es disminuir el par del generador. La caída del par excita la frecuencia resonante del tren de potencia, produciendo oscilaciones del tren de potencia. Tendiendo en cuenta que el par aerodinámico no varía (misma velocidad del viento y ángulo de paso), la velocidad del generador aumenta debido a la diferencia entre el par del generador y el par del rotor. Si se activa el sistema de protección frente a sobrevelocidad, el aerogenerador se desconecta de la red y se detiene lo cual incumple los requisitos del operador de red. Por tanto, el objetivo principal es limitar la velocidad del generador durante la perturbación. Esto se debe realizar sin generar otro tipo de alarmas y manteniendo suficiente par aerodinámico para recuperar la producción de potencia anterior a la caída de tensión en el corto periodo de tiempo que necesita el operador de red.
Como se dijo anteriormente los requisitos de los operadores de red no solo definen las caídas de tensión que deben soportar los aerogeneradores, si no también el tiempo máximo para recuperar ia producción de potencia después de que la red se recupere de la caída. Como en cualquier bucle cerrado el control de par del generador del aerogenerador va a presentar un sobrepasamiento máximo y oscilaciones de amortiguación antes de alcanzar un estado estable. Este sobrepasamiento del par máximo depende en gran medida del modo en que el control efectúa la recuperación del par en cuanto al valor de par aplicado pero también la fase de oscilación del tren de potencia en su frecuencia natural, que ha sido excitado por el rápido cambio de par junto a la caída de tensión. De modo que la respuesta del sistema al transitorio durante la recuperación de la caída de red va a depender de la lógica de oontrol que se siga.
Algunos métodos de control que se han usado en el pasado se centraban en cambiar el funcionamiento actual del amortiguador del tren de potencia durante los transitorios de caída de red. Estas lógicas no mejoran el modo en que se controlan el par del generador y los ángulos de paso para cumplir los requisitos de tiempo de estabilización minimizando el sobrepasamiento máximo, la forma más adecuada de integrar la acción del tren de potencia es conseguir la mejor amortiguación del modo de oscilación de frecuencia principal del tren de potencia o bien la forma de mejorar la cooperación entre el controlador del convertidor y el controlador del aerogenerador. En otro método, la solución se ha ofrecido en términos de
diseño eléctrico: el uso de un convertidor completo con un módulo de resistencia de frenado puede reducir el sobrepasamiento de par en el tren de potencia. Este método requiere la instalación de nuevos generadores de aerogenerador y costes extra.
RESUMEN DE LA EXPOSICIÓN
Los defectos, inconvenientes y problemas mencionados anteriormente se solucionan en la presente invención que se entenderá tras leer y comprender la siguiente especificación.
La presente invención se refiere a un método para reducir la carga mecánica durante una caída de tensión en un aerogenerador. El aerogenerador dispone de un tren de potencia, un generador del aerogenerador, un controlador del generador del aerogenerador y una unidad de control del convertidor. El controlador del aerogenerador y la unidad de control del convertidor funcionan en combinación para controlar la oscilación generada por una caída de tensión en el aerogenerador 100. El método: Aplica una referencia de paso optimizada para minimizar las oscilaciones, evitar valores de sobrevelocidad, y mantener suficiente par aerodinámico para recuperar la producción de potencia en un corto periodo de tiempo después que se recupere la red. Aplica una referencia de potencia aumentada controlada con diferentes velocidades y la filtra con una primera orden si es necesario para reducir el sobrepasamiento de par cuando se recupere de la caída de tensión, cumpliendo los requisitos de tiempo de estabilización e integrando de la forma más adecuada la acción del amortiguador del tren de potencia. El método consta del paso en el que el controlador del aerogenerador recibe información de la unidad de control del convertidor para saber que está ocurriendo una caída de tensión. En el siguiente paso, el controlador del aerogenerador calcula el par aerodinámico actual y la derivada del par respecto al ángulo de paso para saber el par aerodinámico restante durante cualquier momento de la caída de tensión, se aplica una velocidad de paso mínima para evitar la sobrevelocidad del generador manteniendo suficiente par aerodinámico para recuperar la producción de potencia después de la caída. Una vez que la red se recupera de la caída de tensión, una unidad de control del convertidor proporciona un valor máximo de par o potencia a un controlador del aerogenerador. En lo que respecta a este límite instantáneo el
controlador del aerogenerador calcula un límite más restrictivo restando una compensación para asegurarse de que va a ser posible aplicar la referencia de potencia o de par de! DTD. Se calcula una referencia de potencia o de par del generador usando diferentes velocidades según las oscilaciones del tren de potencia, para minimizar el sobrepasamiento de par del transitorio y para mejorar la amortiguación del modo de oscilación de frecuencia natural del tren de potencia teniendo en cuenta el valor calculado de par o potencia máximo y las restricciones de tiempo de estabilización. Esta referencia se filtra con un filtro de primera orden si es necesario. Y finalmente, se aplica una amortiguación mejorada del tren de potencia a la referencia aumentada para añadir una amortiguación extra ai modo de oscilación de frecuencia natural del tren de potencia.
Otros aspectos resultarán evidentes para los expertos en la materia tras considerar la siguiente descripción detallada de las realizaciones ilustrativas que demuestran el mejor modo de llevar a cabo la invención tal como se percibe actualmente.
BREVE DESCRIPCIÓN DE LOS PLANOS
Las realizaciones preferibles de la invención se describirán en lo sucesivo junto con los planos adjuntos que se facilitan para ilustrar y no limitar la invención, en la cual las designaciones similares denotan elementos similares, y en la cual:
La Fig. 1 muestra una vista en perspectiva de un aerogenerador de acuerdo con una realización de la exposición;
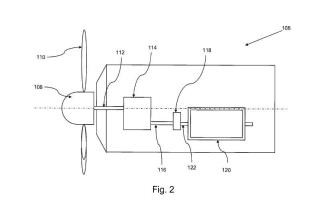
La Fig. 2 muestra una vista lateral de una góndola junto con un tren de potencia según la realización mostrada en la Fig. 1;
La Fig. 3 muestra un diagrama de bloques que indica...
Reivindicaciones:
1. Un método para reducir la carga mecánica en un aerogenerador cuando sufre una caída de tensión de la red, disponiendo el aerogenerador de un tren de potencia, una unidad de control del convertidor y un controlador del generador de! aerogenerador, consistiendo dicho método en:
recibir el controlador del generador del aerogenerador una señal de la unidad de control del convertidor, indicando dicha señal una caída de tensión en el aerogenerador;
ordenar que el ángulo de paso de las palas se desplace hacia la posición de bandera con una velocidad específica
proporcionar un valor de generación de potencia activa máximo por parte de la unidad de control del convertidor al controlador del generador dei aerogenerador;
establecer un valor de saturación de ias consignas dei tren de potencia para garantizar una correcta aplicación de la acción del DTD, dependiendo el valor de saturación establecido por la unidad de control del convertidor de la potencia activa máxima;
aumentar las consignas de potencia o par con diferentes velocidades de acuerdo con la acción del DTD para obtener un valor aumentado de la potencia teniendo en cuenta las restricciones de tiempo de estabilización de los operadores de red;
aplicar un filtro de primera orden para suavizar más el sobrepasamiento de par, aplicar el comando de par de amortiguador del tren de potencia a la referencia de potencia aumentada para reducir la carga mecánica en el aerogenerador y amortiguar la oscilación en el generador del aerogenerador.
2. El método expuesto en la reivindicación 1, en el cual se calcula la velocidad de movimiento de paso para evitar la sobrevelocidad del generador teniendo en cuenta el par transmitido restante Tt (par aerodinámico).
3. El método expuesto en la reivindicación 1, en el cual se calcula el par aerodinámico restante durante cualquier momento de la caída de tensión mediante un algoritmo que usa como parámetros el par aerodinámico inicial y una derivada del par respecto al ángulo de paso.
4. El método expuesto en la reivindicación 1, en el cual se establece el valor de máximo de saturación de par o potencia activa como la resta de la potencia activa máxima enviada por la unidad de control del convertidor y una compensación variable para garantizar la correcta aplicación de la referencia de par del DTD.
5. El método expuesto en la reivindicación 1, en el cual el generador del aerogenerador es un generador doblemente alimentado.
6. El método expuesto en la reivindicación 1, en el cual el generador del aerogenerador usa una tecnología de convertidor completa en ¡a que el tren de potencia se ve afectado por caídas de tensión.
7. El método expuesto en la reivindicación 1, en el cual se usa el método durante la caída de tensión y una vez solucionada la caída de tensión.
8. El método expuesto en la reivindicación 1, que incluye asimismo el paso de desactivar el método.
9. El método expuesto en la reivindicación 1, en el cual la potencia activa máxima se calcula como el valor de generación de intensidad activa máximo por parte del convertidor multiplicado por la tensión de red.
10. Un método de gestión inteligente de la potencia durante una caída de tensión en un aerogenerador, consistiendo dicho método en:
recibir una señal de la unidad de control del convertidor, indicando dicha señal una caída de tensión en el aerogenerador;
proporcionar un valor de generación de potencia activa máximo por parte de la unidad de control del convertidor al controlador del generador del aerogenerador;
ordenar que el ángulo de paso de las palas se desplace hacia la posición de bandera con una velocidad específica
proporcionar un valor de generación de potencia activa máximo por parte de la unidad de control del convertidor al controlador del generador del aerogenerador;
establecer un valor de saturación de las consignas del tren de potencia para garantizar una
correcta aplicación de la acción del DTD, dependiendo el valor de saturación establecido por la unidad de control del convertidor de la potencia activa máxima;
aumentar las consignas de potencia o par con diferentes velocidades de acuerdo con la acción del DTD para obtener un valor aumentado de la potencia teniendo en cuenta las 10 restricciones de tiempo de estabilización de los operadores de red;
aplicar un filtro de primera orden para suavizar más el sobrepasamiento de par, aplicar el comando de par de amortiguador del tren de potencia a la referencia de potencia aumentada para reducir la carga mecánica en el aerogenerador y amortiguar la oscilación en el generador del aerogenerador.
Patentes similares o relacionadas:
Aparato y procedimiento para hacer funcionar una turbina eólica en condiciones de voltaje de red de suministro bajo, del 22 de Julio de 2020, de VESTAS WIND SYSTEMS A/S: Generador de turbina eólica que incluye un rotor que tiene palas de paso variable conectadas de forma funcional a él, un generador AC para suministrar electricidad […]
Procedimiento y sistema para el control de una turbina eólica, del 15 de Julio de 2020, de Siemens Gamesa Renewable Energy Service GmbH: Procedimiento para el control de una turbina eólica en el que, en un circuito de regulación cerrado , se determina un valor de ajuste para […]
Control de un sistema de turbina eólica multirrotor que usa un controlador central para calcular objetivos de control local, del 1 de Julio de 2020, de VESTAS WIND SYSTEMS A/S: Un sistema de control para un sistema de turbina eólica que comprende una pluralidad de módulos de turbina eólica montados en una estructura de soporte […]
Procedimiento para hacer funcionar una instalación de energía eólica, así como instalación de energía eólica, del 1 de Julio de 2020, de Wobben Properties GmbH: Procedimiento para hacer funcionar una instalación de energía eólica con un generador para suministrar potencia eléctrica a una red eléctrica, donde la instalación […]
Control de turbina eólica utilizando un controlador de señales, del 24 de Junio de 2020, de GENERAL ELECTRIC COMPANY: Un sistema de control de una turbina eólica , que comprende: un sensor configurado para proporcionar una señal indicativa de uno o más parámetros de la turbina […]
Aerogenerador con receptor de datos, del 24 de Junio de 2020, de GENERAL ELECTRIC COMPANY: Parque eólico , que comprende por lo menos dos aerogeneradores ; y un receptor que es un centro de control remoto, comprendiendo cada una de los […]
Sistema y procedimiento para controlar una corriente de secuencia negativa en un generador de un aerogenerador, del 13 de Mayo de 2020, de GENERAL ELECTRIC COMPANY: Procedimiento para controlar un sistema de corriente eléctrica conectado a una red eléctrica , presentando el sistema de corriente eléctrica […]
 Disposición para la supervisión de un parque eólico, del 29 de Abril de 2020, de Siemens Gamesa Renewable Energy Service GmbH: Disposición de una pluralidad de turbinas eólicas (11, 11a, 11b, 11c), una central de supervisión , un módulo de cálculo , un módulo […]
Disposición para la supervisión de un parque eólico, del 29 de Abril de 2020, de Siemens Gamesa Renewable Energy Service GmbH: Disposición de una pluralidad de turbinas eólicas (11, 11a, 11b, 11c), una central de supervisión , un módulo de cálculo , un módulo […]