Formación de imágenes dentales mediante tomografía por ordenador.
Un aparato odontológico de tomografía por ordenador, que incluye
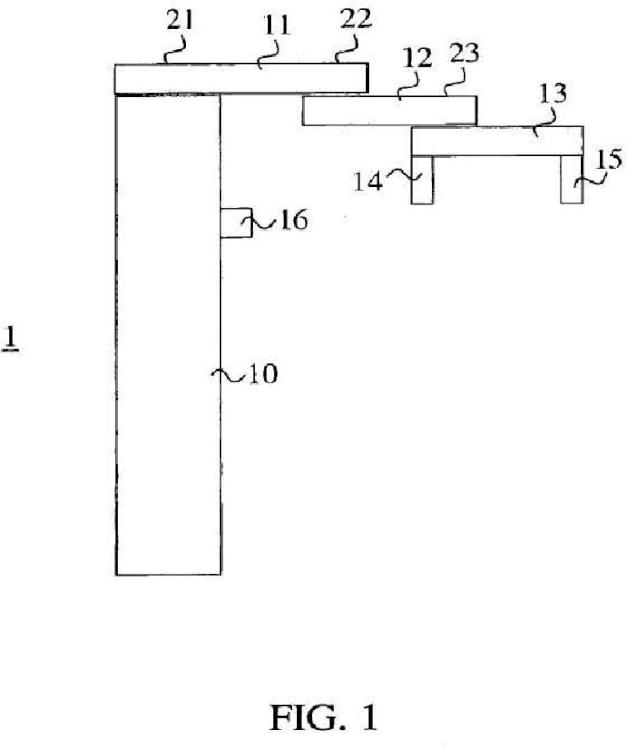
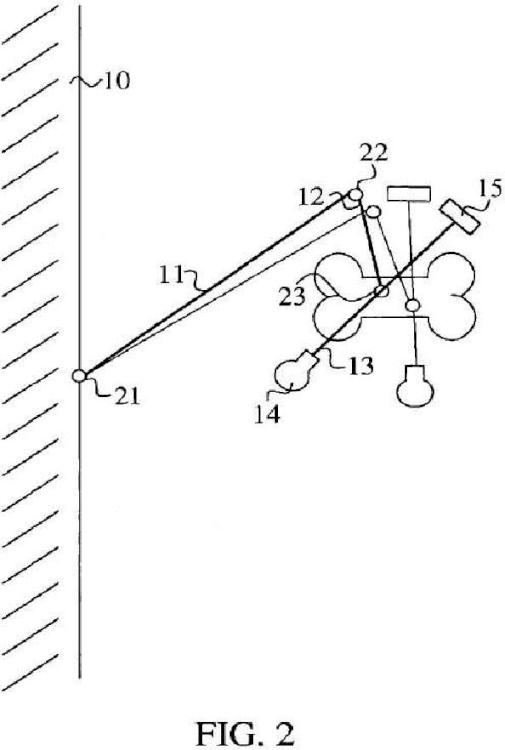
- una estructura de brazos conectada a una parte de cuerpo 10 del aparato 1 o a una estructura fija que no pertenece al aparato 1 propiamente dicho,
- cuya estructura de brazos incluye una parte de brazo 13, que comprende medios de formación de imágenes 14, 15 y que puede girar alrededor de un centro de rotación 23,
- cuyos medios de formación de imágenes citados comprenden una fuente de radiación 14 y un detector de formación de imágenes 15, que están situados esencialmente en los extremos opuestos de dicha parte de brazo 13,
- una estructura colimadora para limitar a un haz la radiación producida por dicha fuente de radiación 14,
- medios de soporte de pacientes 16 en conexión con una instalación de formación de imágenes dispuesta en conexión con el aparato, y
- un sistema de control que incluye medios de control y accionadores para controlar y llevar a cabo el accionamiento y los movimientos de dicha fuente de radiación 13 y dicho detector de formación de imágenes 14, así como para controlar y llevar a cabo los movimientos de dicha estructura de brazos,
caracterizado porque
dicha instalación de formación de imágenes está dispuesta como estacionaria y dichos medios de soporte de pacientes 16, para situar un paciente, como inmóviles sobre un plano horizontal con respecto a la instalación de formación de imágenes, y porque dicha parte de brazo 13, que comprende los medios de formación de imágenes 14, 15, está conectada a dicha parte de cuerpo 10 del aparato, o a alguna otra estructura del aparato que está fija con respecto a los medios de soporte de pacientes 16, a través de, al menos, otras dos partes de brazo 11, 12 giratorias, en el que cada una de, al menos, dos partes de brazo 11, 12 está dispuesta para poder girar con respecto a, al menos, dos centros de rotación 21, 22, 23 situados a una cierta distancia entre sí y sustancialmente en el mismo plano, de cuyos centros de rotación 21, 22, 23, en primer lugar, el centro más exterior de rotación 23 de una de las partes de brazo más exteriores 11, 12 está conectado a dicha parte de brazo 13, que comprende medios de formación de imágenes 14, 15, y, en segundo lugar, el centro más exterior de rotación 21 de la otra de las partes de brazo más exteriores 11, 12 está conectado a dicha parte de cuerpo 10 o a otra estructura que está fija con respecto a los medios de soporte de pacientes 16.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FI2006/050097.
Solicitante: PLANMECA OY.
Nacionalidad solicitante: Finlandia.
Dirección: ASENTAJANKATU 6 00880 HELSINKI FINLANDIA.
Inventor/es: NYHOLM,KUSTAA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B6/03 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 6/00 Aparatos de diagnóstico por radiación, p. ej. combinados con el equipo de radioterapia (instrumentos para la medida de la intensidad de la radiación de aplicación en el campo de la medicina nuclear, p. ej. en vivo cómputo, G01T 1/161; aparatos para la toma de fotografías de rayos X G03B 42/02). › Tomografía computerizada (ecotomografía A61B 8/14).
- A61B6/04 A61B 6/00 […] › Colocación de los pacientes; Camas inclinables o similares (mesas de operaciones A61G 13/00; sillas de operaciones A61G 15/00).
- A61B6/14 A61B 6/00 […] › Aplicaciones o adaptaciones para odontología.
PDF original: ES-2553459_T3.pdf
Patentes similares o relacionadas:
Un método y sistema para obtener parámetros operativos para la adquisición de rayos X 3D, del 22 de Julio de 2020, de Trophy: Un método para obtener parámetros operativos para un aparato de formación de imágenes CBCT de rayos X con el fin de adquirir un conjunto de datos […]
Detector digital, del 25 de Marzo de 2020, de Trophy: Un aparato de imágenes dentales extraorales para obtener una imagen de un paciente, comprendiendo el aparato: una fuente de radiación ; un sensor […]
Tratamiento dinámico de datos de imagen en dispositivos de formación de imágenes dentales, del 25 de Diciembre de 2019, de Trophy: Un procedimiento de formación de imágenes de rayos X cefalométricas de una región de interés de un paciente con un aparato de rayos X que […]
Dispositivo y procedimiento de fabricación de un aparato de ortodoncia, del 2 de Octubre de 2019, de Sonnenberg Consulting AG: Procedimiento de fabricación de aparatos de ortodoncia, así como de un dispositivo para la adhesión indirecta de aparatos de ortodoncia, en particular […]
Procedimiento para la fabricación de una plantilla de perforación dental, del 23 de Abril de 2019, de Med.dent.minds GmbH: Procedimiento para la fabricación de una plantilla de perforación dental adaptada a una estructura de mandíbula de un paciente con al menos un canal de guiado […]
Un procedimiento de clasificación de superficies de diente, del 4 de Diciembre de 2018, de Carestream Dental Technology Topco Limited: Un procedimiento implementado por ordenador para procesamiento de imágenes dentales, comprendiendo el procedimiento: obtener (S100) una imagen digital […]
 Aparato de tomografía computarizada para odontología, del 4 de Octubre de 2018, de PLANMECA OY: Aparato de tomografía computarizada dental, que incluye
- una primera parte de brazo dispuesta de manera giratoria alrededor de un […]
Aparato de tomografía computarizada para odontología, del 4 de Octubre de 2018, de PLANMECA OY: Aparato de tomografía computarizada dental, que incluye
- una primera parte de brazo dispuesta de manera giratoria alrededor de un […]
Sistema y método multifuncional de obtención de imágenes dentales por rayos X extra oral de sensor único, del 11 de Abril de 2018, de OY AJAT LTD.: Un sistema de obtención de imágenes dentales por rayos X extra oral que comprende: a) una fuente de rayos X para exponer los rayos X a un […]