Formación de imágenes tridimensionales monoculares.
Un dispositivo que comprende un elemento (108) de apertura ubicado dentro de una instalación óptica primaria que tiene un eje central,
el elemento de apertura ubicado entre una lente de campo de la instalación óptica primaria y una lente de retransmisión de la instalación óptica primaria, incluyendo el elemento de apertura tres aberturas (112) ubicadas de forma co-lineal, transmitiendo cada una de las aberturas de forma selectiva una parte de un frente de onda óptico de la instalación óptica primaria, proporcionando de este modo tres canales ópticos, y ubicada la central de las aberturas en el eje central.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2007/003947.
Solicitante: 3M INNOVATIVE PROPERTIES COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 3M Center P.O. Box 33427 St. Paul, MN 55133-3427 ESTADOS UNIDOS DE AMERICA.
Inventor/es: HART,DOUGLAS P, ROHALY,JANOS JR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G03B35/00 FISICA. › G03 FOTOGRAFIA; CINEMATOGRAFIA; TECNICAS ANALOGAS QUE UTILIZAN ONDAS DISTINTAS DE LAS ONDAS OPTICAS; ELECTROGRAFIA; HOLOGRAFIA. › G03B APARATOS O DISPOSITIVOS PARA HACER FOTOGRAFIAS, PARA PROYECTARLAS O VERLAS; APARATOS O DISPOSITIVOS QUE UTILIZAN TECNICAS ANALOGAS UTILIZANDO ONDAS DIFERENTES DE LAS ONDAS OPTICAS; SUS ACCESORIOS (partes ópticas de estos aparatos G02B; materiales fotosensibles para la fotografía o procedimientos fotográficos G03C; aparellaje para el tratamiento de materiales fotosensibles después de la exposición G03D). › Fotografía estereoscópica.
- G03B35/10 G03B […] › G03B 35/00 Fotografía estereoscópica. › con un único aparato pero con un sistema que permite determinar la distancia de los enfoques.
PDF original: ES-2478637_T3.pdf
Fragmento de la descripción:
Formación de imágenes tridimensionales monoculares Antecedentes
Esta solicitud reivindica prioridad de las siguientes solicitudes de patente de EEUU: Sol. EEUU n°6/773,132 presentada el 13 de febrero de 26; Sol. EEUU n°11/53,413 presentada el 8 de septiembre de 26; Sol. EEUU n°11/53,42 presentada el 8 de septiembre de 26; y Sol. EEUU n°11/53,428 presentada el 8 de septiembre de 26.
Campo de la invención
Esta invención se refiere al campo de la imagen, y más concretamente al campo de la toma de muestras de la pupila para la formación de imágenes tridimensionales multi-vista.
Descripción de la técnica relacionada
Un enfoque para la captura de información de profundidad tridimensional es la utilización de un par de dispositivos de grabación de dos dimensiones cuya orientación relativa se conoce. De igual forma que los sistemas ópticos humanos o animales, la obtención de información de la profundidad a partir de sistemas ópticos espaciales es una técnica de triangulación que se basa en la diferencia o disparidad entre las posiciones grabadas de uno o más puntos objetivo en dos sensores de imagen. Para cada característica objetivo, la magnitud de la disparidad está directamente relacionada con esa distancia de la característica del sistema de generación de imágenes. Sin embargo, en los sistemas de visión artificial este enfoque tiene limitaciones, tales como el alto coste de los sistemas múltiples de cámaras/lentes y el alto coste computacional de procesamiento de grandes disparidades de característica objetivo entre un sensor y otro.
Una tecnología estrechamente relacionada con la imagen estéreo es el trío de imágenes, donde se utilizan tres imágenes separadas en lugar de dos. El trío de imágenes se utiliza normalmente para eliminar la ambigüedad de procesamiento y para proporcionar redundancia de formación de imágenes, mejorando de esta forma la precisión y robustez con una mínima adición de coste computacional. La mayoría de los sistemas de trío de imágenes constan de tres cámaras colocadas equidistantes entre sí formando un triángulo equilátero. Por lo general los sistemas estéreo se aprovechan de la posición de la cámara rectificada que provoca disparidad solamente en una dirección. A este respecto, otros arreglos de tríos (tales como la configuración en "L") pueden producir resultados favorables. De forma similar a los sistemas basados en estéreo, los objetos aparecen desplazados en cada una de las imágenes adquiridas por estos sistemas, con un desplazamiento entre las cámaras proporcional a la profundidad. Sin embargo, a diferencia de los sistemas estéreo, el objeto se desplaza en las direcciones horizontal y vertical entre las tres cámaras. Una vez que se conocen las posiciones relativas de la cámara, la imagen de rectificación puede reducir las disparidades de dos dimensiones a disparidades de una sola dimensión. Para resolver información tridimensional, la disparidad de las características del objeto que aparecen en las imágenes tridimensionales se determina a través de la triangulación de la misma manera que en la formación de imágenes basada en estéreo. Las tres vistas definen todos los puntos y aristas (líneas) dentro del espacio fotografiado. El uso de más de dos sensores ayuda con trabajo alrededor del llamado "efecto de apertura" en el sistema de formación de imágenes, en el que la disparidad de imagen local solo se puede determinar perpendicular a las características de textura que proporciona la señal. Esta determinación requiere sensores no co-lineales. Tener más sensores también ayuda con oclusión de superficies objetivo, donde se bloquea un sensor, pero los otros pueden todavía facilitar suficiente información, cuyo beneficio es mayor con sensores no co-lineales.
En los sistemas de formación de imágenes tridimensionales a base de triangulación (incluyendo los sistemas estéreo y de tríos) existe una necesidad para determinar con precisión el desplazamiento de las características objeto entre las imágenes adquiridas. El proceso requerido para determinar este desplazamiento (y de esta manera permitir que las distintas imágenes se resuelvan en un sistema de coordenadas comün) que comúnmente se conoce como registro de la imagen. Se han desarrollado muchos tipos de procesamiento de registro de la imagen, incluyendo el flujo óptico (basado en los gradientes de intensidades de imágenes grabadas), la correlación (basada en la singularidad espacial de la orientación de la característica objeto de la imagen formada y la intensidad), y corte gráfico (basado en la minimización de un usuario función de la energía definida en relación a las características de la imagen).
El documento EE. UU. 6 338 711 describe un sistema de formación de imágenes estéreo y tríos.
Por lo tanto, se han desarrollado un número de técnicas matemáticas y algorítmicas para la resolución de los datos ópticos en representaciones tridimensionales de la materia objeto de imágenes. Sin embargo, sigue habiendo una necesidad para los trenes ópticos mejorados para adquirir datos de imágenes tridimensionales.
Compendio
La presente invención proporciona un dispositivo óptico mejorado como se define en la reivindicación 1. Un sistema
de formación de imágenes tridimensionales utiliza una sola lente óptica primaria con varias configuraciones de aperturas, instalaciones de reenfoque, y similares para obtener tres canales ópticos de compensación cada uno de los cuales se puede captar separadamente con un sensor óptico.
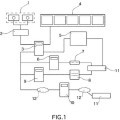
En un aspecto, una cámara descrita en este documento incluye una instalación óptica primaria que tiene una trayectoria óptica con un eje central; un elemento de apertura que Incluye una pluralidad de aberturas para transmitir selectivamente partes de la trayectoria óptica para proporcionar una pluralidad de canales ópticos; una instalación de reenfoque que incluye una pluralidad de lentes de reenfoque, cada una de las lentes de reenfoque en una posición conjugada en la trayectoria óptica a una de la pluralidad de aberturas; y una Instalación de muestreo que dirige uno o más de la pluralidad de canales ópticos hacia un sensor óptico.
El sensor óptico puede incluir un sensor para cada uno de la pluralidad de canales ópticos. El eje central puede ¡ntersectar una de las lentes de reenfoque. La instalación de toma de muestras puede incluir I menos un prisma. El por lo menos un prisma puede incluir un prisma que tiene un orificio ubicado en el eje central, orificio que pasa por un centro de uno de la pluralidad de canales ópticos. La instalación de toma de muestras puede Incluir por lo menos un espejo. El por lo menos un espejo puede Incluir dos espejos separados por un espacio que pasa por un centro de uno de la pluralidad de canales ópticos. Al menos uno de los elementos de abertura y la instalación de reenfoque pueden estar adaptados para girar. El elemento de abertura se puede adaptar para girar mientras que la Instalación de reenfoque puede permanecer estacionaria. El elemento de apertura puede incluir tres aberturas. La cámara puede Incluir un procesador de Imágenes que procesa los datos adquiridos por el sensor óptico.
Se describe en la presente memoria un sistema de formación de imágenes ópticas de tres dimensiones que Incluye una sola instalación óptica primaria en una trayectoria óptica primaria del sistema de formación de imágenes; una Instalación de división de haces de rayos muestra en la trayectoria óptica primaria para proporcionar una pluralidad de haces de rayos muestreados; por lo menos un sensor que recibe uno de la pluralidad de haces de rayos muestreados; y una instalación de procesamiento de imágenes que procesa una salida de al menos un sensor.
La pluralidad de haces de rayos muestreados puede incluir tres haces de rayos, proporcionando cada uno de los tres haces de rayos un canal óptico. El por lo menos un sensor puede incluir tres sensores, adquiriendo cada uno de los tres sensores datos de uno de la pluralidad de haces de rayos.
En otro aspecto, se describe en la presente memoria un sistema de imagen óptica tridimensional que incluye una sola instalación óptica primaria; una instalación de toma de muestras de pupila en una primera pupila de una trayectoria óptica en el sistema de formación de imágenes; y una instalación de división de pupila en una segunda pupila de la trayectoria óptica.
La instalación de toma de muestras de la pupila puede incluir tres canales ópticos: los tres canales ópticos pueden incluir al menos un canal central que comparte un eje con un eje central de la instalación óptica primaria única.
En otro aspecto, se describe en la presente memoria un sistema de imagen óptica tridimensional... [Seguir leyendo]
Reivindicaciones:
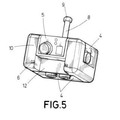
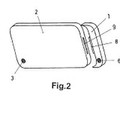
1.- Un dispositivo que comprende un elemento (18) de apertura ubicado dentro de una instalación óptica primaria que tiene un eje central, el elemento de apertura ubicado entre una lente de campo de la Instalación óptica primaria y una lente de retransmisión de la instalación óptica primaria, incluyendo el elemento de apertura tres aberturas
(112) ubicadas de forma co-lineal, transmitiendo cada una de las aberturas de forma selectiva una parte de un frente
de onda óptico de la instalación óptica primaria, proporcionando de este modo tres canales ópticos, y ubicada la central de las aberturas en el eje central.
2.- El dispositivo de la reivindicación 1, en el que las tres aberturas son prácticamente equidistantes.
3.- El dispositivo de la reivindicación 1, en el que el elemento de apertura incluye una o más placas móviles, una
abertura electrónica, un obturador, una abertura de obturación, una abertura oscilante, un espejo de volteo, un
espejo giratorio y un procesador de luz digital.
4 - El dispositivo de la reivindicación 1, en el que el elemento de apertura está adaptado para girar sobre el eje
central.
- El dispositivo de la reivindicación , que comprende además una instalación (11) de reenfoque que tiene tres 15 elementos (14) de reenfoque ubicados en posiciones conjugadas para las tres aberturas dentro de la instalación
óptica primaria.
6.- El dispositivo de la reivindicación 5, en el que la Instalación de reenfoque está adaptada para girar sobre el eje central.
7.- El dispositivo de la reivindicación 5, en el que el elemento de apertura etá adaptado para girar sobre el eje 2 central.
8.- El dispositivo de la reivindicación 7, en el que la Instalación de reenfoque está adaptada para girar en una dirección opuesta del elemento de apertura.
9 - El dispositivo de la reivindicación 1, que comprende además tres sensores (114) ópticos ubicados para captar datos de cada uno de los tres canales ópticos.
1.- El dispositivo de la reivindicación 9, en el que cada uno de los tres sensores ópticos Incluye una colección de
sensores para adquirir datos RGB.
11.- El dispositivo de la reivindicación 9, que comprende además una Instalación (118, 72) de toma de muestras que redirige los tres canales ópticos a los tres sensores ópticos.
Patentes similares o relacionadas:
Dispositivo para la reconstrucción de un par de imágenes de estereofotogrametría, del 7 de Marzo de 2018, de QuantifiCare S.A: Dispositivo fotográfico para la reconstrucción de superficies en tres dimensiones a partir de un par estéreo de imágenes de un sujeto (S) […]
CONSTRUCCIÓN MODULAR ENVOLVENTE PARA ESCANEADO TRIDIMENSIONAL., del 5 de Octubre de 2017, de CASTRO MARTIN, Carlos David: 1. Construcción modular envolvente para escaneado tridimensional, que consistente en una estructura modular montable y desmontable que determina un habitáculo cerrado, […]
 Plataforma fotogramétrica, del 6 de Mayo de 2015, de UNIVERSIDAD DE SALAMANCA: Plataforma fotogramétrica que permite la instalación de una pluralidad de cámaras en una estructura de soporte con al menos unas paredes […]
Plataforma fotogramétrica, del 6 de Mayo de 2015, de UNIVERSIDAD DE SALAMANCA: Plataforma fotogramétrica que permite la instalación de una pluralidad de cámaras en una estructura de soporte con al menos unas paredes […]
 DISPOCITIVO DE GRABACIÓN EN TRES DIMENSIONES PARA TELÉFONOS MÓVILES, del 9 de Agosto de 2012, de ENGINEEA REMOTE TECHNOLOGIES, S.L: Dispositivo de grabación en tres dimensiones para teléfonos móviles, constituido por un dispositivo accesorio que posee una cámara digital de toma de imágenes […]
DISPOCITIVO DE GRABACIÓN EN TRES DIMENSIONES PARA TELÉFONOS MÓVILES, del 9 de Agosto de 2012, de ENGINEEA REMOTE TECHNOLOGIES, S.L: Dispositivo de grabación en tres dimensiones para teléfonos móviles, constituido por un dispositivo accesorio que posee una cámara digital de toma de imágenes […]
Dìspositivo de visualización de imágenes en 3D, del 25 de Julio de 2012, de SHARP KABUSHIKI KAISHA: Una unidad de visualización de imágenes en 3D para visualizar una imagen en 3D configurada mediante unaserie de imágenes, que incluye: un medio de […]
 SISTEMA PARA TRANSMISIÓN DE TELEVISION ESTEREOSCÓPICA, RECEPTORES DE TELEVISIÓN ESTEREOSCÓPICA PARA DICHO SISTEMA Y GAFAS PARA EL VISIONADO ESTEREOSCÓPICO DE LAS CORRESPONDIENTES IMÁGENES, del 31 de Mayo de 2012, de INABA,MINORU: Sistema para transmisión de televisión estereoscópica, receptores de televisión estereoscópica para dicho sistema y gafas para el visionado estereoscópico de las correspondientes […]
SISTEMA PARA TRANSMISIÓN DE TELEVISION ESTEREOSCÓPICA, RECEPTORES DE TELEVISIÓN ESTEREOSCÓPICA PARA DICHO SISTEMA Y GAFAS PARA EL VISIONADO ESTEREOSCÓPICO DE LAS CORRESPONDIENTES IMÁGENES, del 31 de Mayo de 2012, de INABA,MINORU: Sistema para transmisión de televisión estereoscópica, receptores de televisión estereoscópica para dicho sistema y gafas para el visionado estereoscópico de las correspondientes […]
 PROCEDIMIENTO DE CAPTURA Y PRESENTACION DE FOTOGRAFIAS EN 3D EN ATRACCIONES, PARQUES DE ENTRETENIMIENTO Y EVENTOS LUDICOS, del 4 de Mayo de 2011, de NOVOA GONZALEZ, RAMON: Procedimiento de captura y presentación de fotografías en 3D en atracciones, parques de entretenimiento y eventos lúdicos.Procedimiento de captura y visualización […]
PROCEDIMIENTO DE CAPTURA Y PRESENTACION DE FOTOGRAFIAS EN 3D EN ATRACCIONES, PARQUES DE ENTRETENIMIENTO Y EVENTOS LUDICOS, del 4 de Mayo de 2011, de NOVOA GONZALEZ, RAMON: Procedimiento de captura y presentación de fotografías en 3D en atracciones, parques de entretenimiento y eventos lúdicos.Procedimiento de captura y visualización […]
 HOJA DE RETRORREFLEXIÓN CON IMÁGENES IMPRESAS, del 30 de Mayo de 2011, de NIPPON CARBIDE KOGYO KABUSHIKI KAISHA: Una hoja retrorreflectante que incorpora una imagen estereoscópica para la prevención de manipulaciones no autorizadas, comprendiendo la hoja retrorreflectante: - […]
HOJA DE RETRORREFLEXIÓN CON IMÁGENES IMPRESAS, del 30 de Mayo de 2011, de NIPPON CARBIDE KOGYO KABUSHIKI KAISHA: Una hoja retrorreflectante que incorpora una imagen estereoscópica para la prevención de manipulaciones no autorizadas, comprendiendo la hoja retrorreflectante: - […]