Empuñadura para lámparas quirúrgicas.
Lámpara médica con una empuñadura, con la cual se puede modificar un campo luminoso de la lámpara por torsión,
comprendiendo dicha lámpara una pieza (10) de empuñadura apoyada rotativamente entre dos posiciones finales y por lo menos un sensor (40, 42) eléctrico, que detecta cuándo la pieza (10) de empuñadura ha alcanzado una de las posiciones finales, estando unido el sensor (40, 42) con un sistema de control eléctrico, con el cual se puede modificar el campo luminoso de la lámpara quirúrgica, caracterizada por que una modificación del campo luminoso sólo se activa cuando la pieza de la empuñadura se ha movido a una de las posiciones terminales.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09010568.
Solicitante: BERCHTOLD HOLDING GMBH.
Nacionalidad solicitante: Alemania.
Dirección: LUDWIGSTALER STRASSE 25 78532 TUTTLINGEN ALEMANIA.
Inventor/es: Winkler,Martin, Klaus,Peter.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F21S8/00 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F21 ILUMINACION. › F21S DISPOSITIVOS DE ILUMINACION NO PORTÁTILES; SUS SISTEMAS; DISPOSITIVOS DE ILUMINACIÓN DE VEHÍCULOS ESPECIALMENTE ADAPTADOS PARA EL EXTERIOR DEL VEHÍCULO. › Dispositivos de iluminación destinados a una instalación fija (F21S 9/00, F21S 10/00 tienen prioridad; utilizando una tira o ristra de fuentes de luz F21S 4/00).
- F21V21/40 F21 […] › F21V DETALLES O CARACTERISTICAS DE FUNCIONAMIENTO DE LOS DISPOSITIVOS 0 SISTEMAS DE ILUMINACION; COMBINACIONES ESTRUCTURALES DE DISPOSITIVOS DE ILUMINACION CON OTROS OBJETOS, NO PREVISTAS EN OTRO LUGAR. › F21V 21/00 Disposiciones para el soporte, suspensión o fijación de los dispositivos de iluminación (F21V 17/00, F21V 19/00 tiene prioridad ); Empuñaduras. › Empuñaduras.
- F21W131/202 F21 […] › F21W SISTEMA DE INDEXACION ASOCIADO A LAS SUBCLASES F21K, F21L, F21S Y F21V, RELATIVO AL USO O APLICACION DE SISTEMAS O APARATOS DE ILUMINACION. › F21W 131/00 Uso o aplicación de sistemas o aparatos de iluminación no previstos en los grupos F21W 102/00 - F21W 121/00. › para odontología.
- F21W131/205 F21W 131/00 […] › para quirófanos.
- F21Y101/02
PDF original: ES-2381149_T3.pdf
Fragmento de la descripción:
Empuñadura para lámparas quirúrgicas El presente invento se refiere a una lámpara médica según el preámbulo de la reivindicación 1. Una lámpara de este tipo se conoce por el documento DE 10 2004 055838 A1.
Empuñaduras para lámparas del tipo descrito anteriormente se conocen a partir del estado actual de la técnica y sirven para variar el tamaño del campo luminoso de las lámparas quirúrgicas. En las lámparas quirúrgicas conocidas, se cambia mecánicamente la rotación de la empuñadura de tal modo que un agente luminoso, que se encuentra dentro de la lámpara quirúrgica, se desplaza en el interior de la misma.
Es problema del presente invento crear una empuñadura del tipo mencionado al principio, que pueda fabricarse económicamente y con la cual puede llevarse a cabo un reglaje del campo luminoso.
La solución a este problema tiene lugar por medio de las características de la reivindicación 1.
Por consiguiente, con la empuñadura según el invento sólo se comprueba si se ha alcanzado una de las posiciones finales, es decir, no se detecta el movimiento de giro completo de la empuñadura para el reglaje del campo luminoso. Esto tiene la ventaja de que, en el caso de un cambio de posicionado manual de la lámpara quirúrgica, no se modifica por error el campo luminoso, cuando no se desea en absoluto. Sólo cuando la empuñadura se ha movido a una de las posiciones finales, el sensor eléctrico emite una señal de modo que se pueda activar un reglaje de campo luminoso.
Formas de realización ventajosas del invento se describen en la descripción, en dibujo, así como en las reivindicaciones subordinadas.
Según una primera forma de realización ventajosa, el sensor puede ser un sensor de fuerza. Gracias a ello, resulta la posibilidad adicional de variar el reglaje del campo luminoso en función del tiempo y/o de la duración de la fuerza aplicada para realizar con ello, por ejemplo, una marcha rápida.
Según una forma de realización ventajosa preferida, adicional, pueden preverse dos sensores, habiéndose cargado elásticamente previamente la pieza de la empuñadura mediante un agente elástico en una posición de reposo entre las dos posiciones finales.
Según una forma de realización ventajosa más, el campo luminoso de la lámpara quirúrgica es modificable. Siempre que se modifique la luminosidad de los agentes luminosos individuales de la lámpara quirúrgica. Una forma de realización semejante puede ser ventajosa en lámparas quirúrgicas con diodos luminiscentes (LED) como agente luminoso.
Según una forma de realización ventajosa más, el sensor se puede configurar de tal modo que emita una señal de sensor, que pueda modificarse en función de la fuerza aplicada. En este caso, el sistema de control puede variar la velocidad, con la que se modifica el campo luminoso, en función de la amplitud de la señal de sensor. Se entiende que la señal de sensor no debe ser necesariamente una señal analógica, sino también una señal digital.
Según otra forma de realización ventajosa más, el sistema de control, tras quedar por debajo una señal de sensor mínima y/o sobrepasar una señal de sensor máxima, no puede activar modificación alguna del campo luminoso. Con esta forma de realización se asegura especialmente bien que no tenga lugar ningún reglaje por error del campo luminoso, ya que la señal de sensor debe quedar dentro de una zona operativa, que se define por las señales de sensor mínima y máxima. En este caso, puede resultar ventajoso determinar la dinámica del movimiento de la empuñadura de modo que el sistema de control no active, por ejemplo, modificación alguna del campo luminoso, cuando se recorrió una zona de amplitud predeterminada de la señal de sensor dentro de un tiempo mínimo prefijado. En este caso, se ha de suponer, a saber, que la lámpara quirúrgica se cambió de posición y no se necesita reglaje alguno de campo luminoso.
Según otra forma de realización ventajosa más, el sistema de control puede fijar varias zonas de amplitud consecutivas para la señal del sensor, activándose en cada zona de amplitud una modificación del campo luminoso con una velocidad diferente, lo que aumenta la comodidad del servicio.
Según otra forma de realización ventajosa más, la pieza de empuñadura puede estar unida con una palanca giratoria, que impulsa el sensor a través de un elemento amortiguador. Esto lleva, por un lado, a un aumento de a duración aumentada y, por otro, nuevamente a una mayor comodidad de servicio.
A continuación, se describe el presente invento puramente a modo de ejemplo a base de una forma de realización ventajosa y haciendo referencia a los dibujos adjuntos. Lo muestran las figuras:
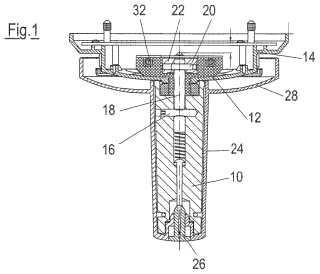
Figura 1 una sección longitudinal a través de la empuñadura;
figura 2 una vista en planta desde arriba ampliada sobre una parte de la empuñadura de la figura 1;
figura 3 un dibujo explosivo despiezado de la disposición de la figura 2; y figura 4 una curva característica del sensor eléctrico.
La figura 1 muestra una vista en sección de una empuñadura para una lámpara quirúrgica (no representada) , en la que por torsión de la empuñadura puede variarse el campo luminoso, por ejemplo, siempre que se pueda modificar mecánicamente el foco de un agente luminoso, o siempre que se modifique la luminosidad de varios agentes luminosos.
La empuñadura comprende una pieza 10 de empuñadura apoyada giratoriamente entre dos posiciones finales, la cual puede girarse unos 70º alrededor de su eje longitudinal, estando unida la pieza 10 de empuñadura con una montura 12, que puede montarse por medio de un platillo 14 de fijación en la lámpara quirúrgica. Tal como muestra la figura, la pieza 10 de empuñadura está unida mediante un pasador 16 hendido con un árbol 18 de acoplamiento, que es conducido a través de la montura 12 y está unido mediante un pasador 20 hendido con una palanca 22 giratoria, que es recibida rotativamente dentro de la montura 12.
El signo 24 de referencia de la figura 1 indica un manguito de agarre esterilizable, que se montar por desplazamiento sobre la pieza 10 de empuñadura y se sujeta con ayuda de una espiga 26 en la pieza 10 de empuñadura. En este caso, se ha conformado una pieza 28 terminal en forma de cúpula en el manguito 24 de agarre, que recubre casi totalmente el platillo 14 de fijación.
La figura 3 muestra una representación explosiva despiezada del montaje de la montura 12 y palanca 22 giratoria. Como puede reconocerse, en la montura 12 se encuentra una ranura 30 anular, que se extiende unos 220º y en la que se ha insertado un muelle 32 espiral. La palanca 22 giratoria, apoyada rotativamente dentro del soporte 12, presenta un zapata 34 de cambio delantera así como un apéndice 34' trasero diametralmente opuesto, que está enganchado con el muelle 32 en estado montado (compárese la figura 2) . De este modo, se puede rotar la palanca 22 giratoria alrededor de su eje central dentro de la montura 12 y en contra de la fuerza del muelle 32 y la palanca 22 giratoria retorna siempre sin acción de fuerza exterior a su posición central representada en la figura 2. Para fijar el muelle 32 dentro de la montura 12, se ha previsto una tapa 36, que puede unirse mediante tres tornillos con la montura 12.
Tal como muestran además las figuras 2 y 3, se han previsto en la montura 12 dos sensores 40 y 42 de fuerza eléctricos, que están pegados respectivamente a una superficie frontal de la montura 12 y que detectan un choque de la zapata 34 de cambio. En la zona de la superficie de contacto, se han previsto en la zapata 34 de cambio dos elementos 44 de amortiguación lenticulares.
Tal como se desprende de la descripción precedente, se puede girar la pieza 10 de empuñadura alrededor de su eje central hacia la izquierda o hacia la derecha desde una posición central, girando asimismo la palanca 22 de cambio una rotación semejante. Cuando la palanca 22 giratoria haya alcanzado una de sus posiciones extremas, hace contacto con uno de los sensores 40 y 42 y ejerce una fuerza sobre el respectivo sensor de modo que el sensor emita una señal modificadora en función de la fuerza ejercida. En función de la señal emitida, se modifica entonces el campo luminoso de la lámpara quirúrgica, para lo cual se prevé un sistema de control (no representado) , que se explicará con más detalle a continuación.
Los sensores 40 y 42 se han configurado, como se ha descrito... [Seguir leyendo]
Reivindicaciones:
1. Lámpara médica con una empuñadura, con la cual se puede modificar un campo luminoso de la lámpara por torsión, comprendiendo dicha lámpara una pieza (10) de empuñadura apoyada rotativamente entre dos posiciones finales y por lo menos un sensor (40, 42) eléctrico, que detecta cuándo la pieza (10) de empuñadura ha alcanzado una de las posiciones finales, estando unido el sensor (40, 42) con un sistema de control eléctrico, con el cual se puede modificar el campo luminoso de la lámpara quirúrgica, caracterizada por que una modificación del campo luminoso sólo se activa cuando la pieza de la empuñadura se ha movido a una de las posiciones terminales.
2. Lámpara según la reivindicación 1, caracterizada porque el sensor (40, 42) es un sensor de fuerza.
3. Lámpara según la reivindicación 1 o 2, caracterizada porque se han previsto dos sensores (40, 42) , y
porque la pieza (10) de la empuñadura está previamente cargada elásticamente por medio de un agente (32) elástico en una posición de reposo entre las dos posiciones finales.
4. Lámpara según al menos una de las reivindicaciones precedentes, caracterizada porque tiene lugar una modificación del campo luminoso por atenuación luminosa de distintos agentes luminosos.
5. Lámpara según la reivindicación 1, caracterizada porque el sensor (40, 42) emite una señal de sensor
modificable en función de la fuerza aplicada y porque el sistema de control varía la velocidad, con la que se modifica el campo luminoso, en función de la amplitud de la señal de sensor.
6. Lámpara según una de las reivindicaciones 1 a 5 precedentes, caracterizada porque el sistema de control, tras pasar por debajo de un valor mínimo y tras sobrepasar una señal de sensor máxima, no activa modificación alguna del campo luminoso.
7. Lámpara según al menos una de las reivindicaciones 1 a 6, caracterizada porque el sistema de control no activa modificación alguna del campo luminoso, cuando se sobrepasó una zona de amplitud previamente fijada de la señal de sensor dentro de un tiempo mínimo prefijado.
8. Lámpara según al menos una de las reivindicaciones 1 a 7 precedentes, caracterizada porque el sistema de control fija zonas consecutivas de amplitud de la señal de sensor, activándose, en cada zona de amplitud, una 25 modificación del campo luminoso con una velocidad diferente.
9. Lámpara según la reivindicación 8, caracterizada porque la velocidad aumenta con cada zona de amplitud consecutiva.
10. Lámpara según al menos una de las reivindicaciones precedentes, caracterizada porque con la pieza (10)
de empuñadura está unida una palanca (22) rotativa, que impulsa el sensor (40, 42) por medio de un elemento (44) 30 amortiguador.
Patentes similares o relacionadas:
Aparato y método de prueba de células solares, del 8 de Julio de 2020, de THE BOEING COMPANY: Un aparato de prueba de células solares que comprende: un iluminador para dirigir la energía luminosa sobre una célula solar […]
POSTE INTELIGENTE Y MÉTODO PARA CONTROLAR DICHO POSTE, del 22 de Mayo de 2020, de PRETENSADOS DE CONCRETO DEL ORIENTE - PRETECOR LTDA: La presente invención corresponde a un poste inteligente, el cual muestra señales visuales, ya sea cuando la personas se acercan al poste inteligente, […]
Baldosa y sistema asociado para el control de alumbrado y/o aforo del tráfico, del 2 de Abril de 2020, de ACTIVIDADES DE CONSULTORIA TECNICA, INVESTICACION Y SERVICIOS AVANZADOS, S.L: Baldosa para el control de alumbrado y/o aforo del tráfico, que comprende una carcasa para su instalación en el pavimento , medios fotovoltaicos […]
Pantalla de difusión transparente y piloto de vehículo en el que se implementa esta pantalla de difusión, del 25 de Marzo de 2020, de Marelli Automotive Lighting France: Pantalla de difusión transparente constituida por una lámina realizada de un material transparente para formar una guía de luz con una cara interna (Fi) […]
Aparato para hacer un faro automovilístico y método de soldadura de láser simultánea de un faro automovilístico, del 1 de Enero de 2020, de Marelli Automotive Lighting Italy S.p.A: Un aparato de soldadura para fabricar un faro automovilístico que comprende: - medios de bloqueo de un cuerpo de contenedor y de […]
Dispositivo de iluminación que tiene equipo de suministro de energía a través de Ethernet, del 18 de Diciembre de 2019, de Smart City Mgt., LLC: Dispositivo que comprende: (a) una carcasa , la carcasa tiene al menos un receptáculo de iluminación para recibir y proporcionar […]
Dispositivo de iluminación que tiene equipo de alimentación eléctrica de tipo de alimentación a través de Ethernet, del 13 de Noviembre de 2019, de Smart City Mgt., LLC: Un dispositivo de iluminación que comprende: una carcasa que tiene al menos un enchufe para recibir y suministrar energía a una […]
Navegación vehicular basada en datos de calidad de sensor específicos del sitio, del 23 de Octubre de 2019, de DEERE & COMPANY: Un método para determinar la localización de un vehículo, el método que comprende: determinar los datos de localización de recepción dentro de una celda de un área […]