Elevador de carga neumático de capacidad variable autoajustable.
Elevador de carga que comprende:
una base (12); y
una plataforma de carga (16) acoplada mecánicamente a la base (12) y que puede moverse entre una posición extendida y una posición retraída con respecto a la base (12);
y
un accionador neumático (18) adaptado para soportar la plataforma (16) entre dichas posiciones retraída y extendida, sometiéndose dicho accionador neumático (18) a una presión de accionador;
caracterizado porque se conecta un sistema neumático al accionador neumático (18);incluyendo el sistema neumático una pluralidad de depósitos (22, 24, 26) y válvulas respectivas (28, 30) para la conexión alternativa al accionador neumático (18) con capacidades volumétricas del sistema neumático fijas y correspondientemente alternativas para distintos modos de funcionamiento del elevador de carga, sometiéndose cada uno de los depósitos de dicha pluralidad de depósitos (22, 24, 26) neumáticamente a dicha presión del accionador cuando se conecta neumáticamente al accionador neumático (18).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2011/031498.
Solicitante: BISHAMON INDUSTRIES CORPORATION.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 5651 E. Francis Street Ontario, CA 91761 ESTADOS UNIDOS DE AMERICA.
Inventor/es: STONE,ROBERT M.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66F7/22 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › B66F 7/00 Bastidores de elevación, p. ej. para elevar vehículos; Ascensores de plataforma (plataformas para carros elevadores B66F 9/06). › con plataformas basculantes (basculado de vehículos para la descarga B65G 67/34).
PDF original: ES-2530348_T3.pdf
Fragmento de la descripción:
Elevador de carga neumático de capacidad variable autoajustable ANTECEDENTES DE LA INVENCIÓN
Campo de la invención En general, la invención se refiere a elevadores de carga destinados a la carga y descarga de objetos; en particular, a elevadores de carga que pueden autoajustarse para mantener el nivel de una carga variable a una altura predeterminada conveniente.
Descripción del estado actual de la técnica En el proceso de la manipulación de objetos, como paquetes en un almacén, normalmente los objetos se trasladan manualmente desde un palé que descansa sobre el suelo hasta una mesa, un transportador, etc., o viceversa. Mientras la mesa o el transportador permanecen a una altura fija, la parte superior de la carga dispuesta sobre el palé varía en altura según se van acumulando objetos sobre el palé o según se retiran del mismo. Esta elevación variable de los objetos a manipular resulta fatigosa y puede ser peligrosa para la persona que está trasladando los objetos. Por ello, se han desarrollado elevadores para levantar el palé del suelo hasta una altura más conveniente y también para ajustar automáticamente la altura del palé a una posición óptima variable según va aumentando o disminuyendo la carga.
Por ejemplo, la patente US nº 4.764.075 describe un elevador de tijera soportado por resortes metálicos helicoidales que mantienen la parte superior a una altura preseleccionada sobre el suelo según se añaden o retiran cajas. La patente US nº 5.299.906 describe un elevador de tijera neumático autoajustable con un sistema accionador de aire que incluye un accionador de aire comprimible o fuelle y un depósito de volumen fijo. El fuelle, montado entre la articulación de tijera y la plataforma de carga, puede comprimirse entre unas alturas máxima y mínima de fuelle especificadas, que determinan correspondientemente unos volúmenes máximo y mínimo de fuelle sustancialmente diferentes. El depósito de aire está acoplado al fuelle y tiene un volumen fijo que es considerablemente mayor que la diferencia entre los volúmenes máximo y mínimo del fuelle. Como resultado, durante la carga o descarga, la altura de la plataforma cambia con el fin de mantener la parte superior de la carga esencialmente al mismo nivel mientras se añaden objetos a la plataforma o se retiran de la misma.
Como demuestra su éxito comercial, el elevadordecargade la patente'906representóuna importante mejora en la técnica. Sin embargo, una vez ajustada la presión en el sistema neumático, el rendimiento del elevador está fijado según una curva predeterminada de altura con respecto a la carga, que depende en gran medida del volumen del depósito.Normalmente, eloperadorno tiene la posibilidad de cambiarsobre el terrenolapresióndesistemao, sise le permite, es posible que no pueda disponer fácilmente de una fuente de aire comprimido. Por tanto, dado que la curva de rendimiento del elevador está fijada para una presión de sistema dada sin tener en cuenta la densidad de la carga que se estámanipulando, la alturadelaplataformapuedeno ser la óptima paratodos los pesos.Esdecir, los objetos más pesados (aquellos de mayor densidad) bajarán la plataforma más rápidamente que los más ligeros. Si la presión del elevadorestá ajustada para una cargamásligera, estosignifica queel operadortendrá que trabajara una altura inferior a la que sería óptima si la presión estuviese ajustada para la carga más pesada (yviceversa) .
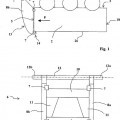
Esto constituye un problema en entornos donde las cargas que se manipulan varían sensiblemente de un cargamento a otro. Por ejemplo, en referencia a la FIG. 1, un elevador como el descrito en la patente '906 está diseñadopara producirun desplazamiento de 508mm (20 pulgadas) desde la máxima elevación de la plataforma (a una altura de 761 mm) (30 pulgadas) hasta la mínima (a una altura de 254 mm) (10 pulgadas) . Obviamente, la carga máxima necesaria para producir la bajada completa de la plataforma depende de la presión del sistema neumático. Como indica la primera curva a la izquierda de la figura, la plataforma alcanzará su menor altura cuando la carga sea de 227 kg (500 libras) si la presión de sistema está ajustada a 1, 1 bar (16 psi) . Según aumenta la carga sobre la plataforma, el desplazamiento de la plataforma es más o menos lineal, lo cual es el funcionamiento deseado si la densidadde unacarga uniformees talque la plataforma esté completamente cargada cuando secolocansobre ella 227 kg (500 libras) de material. Si, por otra parte, el material es el doble de denso, por ejemplo, es evidente que la plataforma alcanzará su punto más bajo a 254 mm (10 pulgadas de altura) cuando la plataforma esté sólo medio cargada, lo que significa que la mayor parte del tiempo el operador estará trabajando a una altura inferior a la óptima.
Se da el problema opuesto si la presión está ajustada alta para cargas más pesadas y, en lugar de éstas, se manipula una carga más ligera. En referencia a la última curva situada a la derecha en la FIG. 1, por ejemplo, con una presión de sistema ajustada a 5, 2 bar (75 psi) la plataforma comenzaría a descender con 367 kg (800 libras) y alcanzaría supunto másbajo sólocuandolacarga fuera de 975 kg (2.150 libras) .Así, si el peso delmaterialquese está manipulando fuese tal que 227 kg (500 libras) del mismo fueran suficientes para cargar completamente la plataforma, el operador tendría que colocar el material a una altura cada vez mayor sobre una plataforma que permanecería a la altura constante de 761 mm (30 pulgadas) (ya que ésta no empezaría a moverse hasta que se hubiesen colocado sobre ella 367 kg (800 libras) ) .
Esto puede suponer un gran inconveniente en aquellos casos donde el operador no puede cambiar la presión del sistema para adaptarla a los requisitos del trabajo en cuestión. Por tanto, sería muy útil poder manejar un sistema cargado con una presión inicial determinada con el fin de cambiar la carga necesaria para bajar la plataforma hasta su altura inferior. Es decir, sería muy ventajoso poder combinar las curvas de rendimiento de la FIG. 1 para obtener múltiples capacidades de carga máximas a partir de una presión inicial de carga mínima común. La presente invención está dirigida a solucionar este problema, proporcionando un sistema autónomo con ajustes opcionales que permiten al operador manipular cargas de densidades sensiblemente diferentes a una altura de trabajo esencialmente igual en todo el intervalo de movimiento de la plataforma.
El documento US 5.771.816 (Zaguroli) describe una mesa elevadora que tiene las características según el preámbulo de la reivindicación 1.
SUMARIO DE LA INVENCIÓN
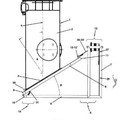
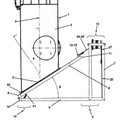
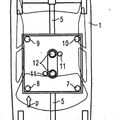
La invención consiste en un elevador de carga con los elementos caracterizantes de la reivindicación 1. Más específicamente, un sistema neumático con múltiples depósitos de aire conectados al fuelle del elevador mediante una pluralidad de válvulas, que permiten la conexión neumática opcional de diferentes combinaciones de depósitos con el fin de modificar el intervalo de funcionamiento del elevador para satisfacer los requisitos de peso del trabajo en cuestión. El elevador comprende una base, una plataforma de carga horizontal, una articulación de tijera extensible verticalmente acoplada entre la plataforma de carga y la base y una cámara de accionamiento o fuelle acoplada (o) mecánicamente entre la base y la articulación de tijera.
En la realización preferente de la invención, el accionador está conectado neumáticamente a un depósito de aire principal, que opcionalmente puede a su vez acoplarse en serie con uno o dos depósitos adicionales de diferentes capacidades.Como resultado de esta configuración de susistema neumático, elelevadorpuede conmutarse entre y hacerse funcionar en un modo autoajustable en tres niveles de carga diferentes, según le convenga al operador, sin cambiar la cantidad de aire en elsistema.
De la descripción siguiente de la invención y de las nuevas características señaladas especialmente en las reivindicaciones adjuntas se desprenden otros diversos propósitos y ventajas de la invención. Por tanto, para la consecución de los objetivos arriba descritos, esta invención consiste en las características ilustradas a continuación en las figuras, descritas por completo en la descripción detallada de las realizaciones preferentes y señaladas especialmente en las reivindicaciones. Sin embargo, dichas figuras y descripción describen sólo uno de los diversos modos en los que la invención puede llevarse a la práctica.
BREVE DESCRIPCIÓN DE LAS FIGURAS
FIG. 1: gráficos de rendimiento correspondientes al estado actual de la técnica que muestran la altura de la plataforma elevadora en función de la carga para varias presiones de aire iniciales... [Seguir leyendo]
Reivindicaciones:
1. Elevador de carga que comprende:
una base (12) ; y una plataforma de carga (16) acoplada mecánicamente a la base (12) y que puede moverse entre una posición extendida y una posición retraída con respecto a la base (12) ; y un accionador neumático (18) adaptado para soportar la plataforma (16) entre dichas posiciones retraída y extendida, sometiéndose dicho accionador neumático (18) a una presión de accionador;
caracterizado porque se conecta un sistema neumático al accionador neumático (18) ;incluyendo el sistema neumático una pluralidad de depósitos (22, 24, 26) y válvulas respectivas (28, 30) para la conexión alternativa al accionador neumático (18) con capacidades volumétricas del sistema neumático fijas y correspondientemente alternativas para distintos modos de funcionamiento del elevador de carga, sometiéndose cada uno de los depósitos de dicha pluralidad de depósitos (22, 24, 26) neumáticamente a dicha presión del accionador cuando se conecta neumáticamente al accionador neumático (18) .
2. Elevador según la reivindicación 1, caracterizado porque dicha base (12) y dicha plataforma (16) están acopladasmediante un mecanismo de tijera (14) .
3. Elevador según la reivindicación 2, caracterizado porque dicho accionador (18) está conectado a la base
(12) y al mecanismo de tijera (14) .
4. Elevador según las reivindicaciones 1, 2 o 3, caracterizado porque dichos depósitos comprenden un depósito principal (22) acoplado al accionador (18) , un segundo depósito (24) acoplado al depósito principal
(22) y un tercer depósito (26) acoplado al depósito principal (22) .
5. Elevador según la reivindicación 4, caracterizado porque dichos segundo y tercer depósitos (24, 26) tienen volúmenes diferentes.
6. Elevador según la reivindicación 1, 2, 3, 4 o 5, caracterizado porque además incluye una válvula de tanque
(40) para presurizarelsistema neumático y una válvula de purga (42) para purgar el sistema neumático.
Patentes similares o relacionadas:
Estructura para volcar vehículos, del 4 de Junio de 2019, de PÉREZ FUSTÉ, Xavier: La figura 10 es un ejemplo de estructura para volcar vehículos compuesta por un aro , un soporte con mecanismo elevador/descensor y un patín […]
Estructura para volcar vehículos, del 11 de Septiembre de 2017, de PÉREZ FUSTÉ, Xavier: La figura 1 es un ejemplo de estructura para volcar vehículos compuesta por anillos circulares , montantes transversales y montantes longitudinales […]
 DISPOSITIVO DE PENDIENTE VARIABLE AUTO-AJUSTABLE PARA SUSTENTACIÓN DE OBJETOS DE BASE INCLINADA, del 23 de Mayo de 2012, de UNIVERSIDAD DE MALAGA: Dispositivo de pendiente variable auto-ajustable para sustentación de objetos con base inclinada , formado por un bastidor fijo y una base abatible con […]
DISPOSITIVO DE PENDIENTE VARIABLE AUTO-AJUSTABLE PARA SUSTENTACIÓN DE OBJETOS DE BASE INCLINADA, del 23 de Mayo de 2012, de UNIVERSIDAD DE MALAGA: Dispositivo de pendiente variable auto-ajustable para sustentación de objetos con base inclinada , formado por un bastidor fijo y una base abatible con […]
 DISPOSITIVO DE PENDIENTE VARIABLE AUTO-AJUSTABLE PARA SUSTENTACIÓN DE OBJETOS DE BASE INCLINADA, del 3 de Mayo de 2012, de UNIVERSIDAD DE MALAGA: Dispositivo de pendiente variable auto-ajustable para sustentación de objetos con base inclinada , formado por un bastidor fijo y una base abatible con respecto […]
DISPOSITIVO DE PENDIENTE VARIABLE AUTO-AJUSTABLE PARA SUSTENTACIÓN DE OBJETOS DE BASE INCLINADA, del 3 de Mayo de 2012, de UNIVERSIDAD DE MALAGA: Dispositivo de pendiente variable auto-ajustable para sustentación de objetos con base inclinada , formado por un bastidor fijo y una base abatible con respecto […]
ALTILLO DE ESTRUCTURA ABATIBLE, del 16 de Abril de 2012, de BELCHI LOPEZ, Rubén: 1. Altillo de estructura abatible, caracterizado porque comprende - una base de fijación al suelo, sobre la que hay dispuesto - al […]
 MÉTODO DE VOLTEO DE UNA ESTRUCTURA Y APARATO ASOCIADO A DICHO MÉTODO, del 11 de Mayo de 2011, de NEXTER SYSTEMS: Procedimiento de volteo de una estructura , por ejemplo una caja de un vehículo después de una tapa de montaje de equipos, en particular de medios de movilidad, a nivel […]
MÉTODO DE VOLTEO DE UNA ESTRUCTURA Y APARATO ASOCIADO A DICHO MÉTODO, del 11 de Mayo de 2011, de NEXTER SYSTEMS: Procedimiento de volteo de una estructura , por ejemplo una caja de un vehículo después de una tapa de montaje de equipos, en particular de medios de movilidad, a nivel […]
 DISPOSITIVO DE MANIPULACION PARA ACCIONAR, SUMERGIR Y GIRAR CARROCERIAS DE VEHICULOS AUTOMOVILES Y DE FURGONETAS, CABINAS DE CAMION Y RECIPIENTES DE ARTICULOS METALICOS EN DEPOSITOS DE TRATAMIENTO, del 3 de Diciembre de 2010, de GEICO S.P.A.: Dispositivo de manipulación para accionar, sumergir y girar carrocerías de vehículos automóviles dentro y desde unos depósitos de tratamiento, comprendiendo […]
DISPOSITIVO DE MANIPULACION PARA ACCIONAR, SUMERGIR Y GIRAR CARROCERIAS DE VEHICULOS AUTOMOVILES Y DE FURGONETAS, CABINAS DE CAMION Y RECIPIENTES DE ARTICULOS METALICOS EN DEPOSITOS DE TRATAMIENTO, del 3 de Diciembre de 2010, de GEICO S.P.A.: Dispositivo de manipulación para accionar, sumergir y girar carrocerías de vehículos automóviles dentro y desde unos depósitos de tratamiento, comprendiendo […]
 BANCO DE PRUEBAS PARA VEHICULOS DE MOTOR CON UN DISPOSITIVO BASCULANTE, del 1 de Marzo de 2008, de SIEMENS AKTIENGESELLSCHAFT: Banco de pruebas para vehículos de motor, que presenta una unidad de bastidor inferior y una unidad de bastidor superior que puede […]
BANCO DE PRUEBAS PARA VEHICULOS DE MOTOR CON UN DISPOSITIVO BASCULANTE, del 1 de Marzo de 2008, de SIEMENS AKTIENGESELLSCHAFT: Banco de pruebas para vehículos de motor, que presenta una unidad de bastidor inferior y una unidad de bastidor superior que puede […]