Dispositivo de manejo con una sola mano para cirugía oftálmica.
Dispositivo quirúrgico de manejo con una sola mano que comprende un tubo (3) que incorpora una punta (5) en su extremo delantero,
en el que un dispositivo para la extirpación de tejido corporal en una intervención quirúrgica es utilizado como dicha punta,
presentando dicho dispositivo:
un tubo (53) que presenta un eje longitudinal, presentando también el tubo un conducto (125) de aspiración y una abertura (53b) de aspiración para recoger el tejido extirpado,
un cuerpo de corte / cuerpo de trituración (54) que está montado dentro del tubo de tal manera que puede rotar alrededor de un eje de rotación (56), en el que el cuerpo de corte / cuerpo de trituración (54), al menos en una parte de su periferia, presenta una pluralidad de bordes (55) de separación,
en el que el cuerpo de corte / cuerpo de trituración (54) está montado de tal manera que los bordes (55) de separación quedan sucesivamente expuestos en la abertura (53b) de aspiración hacia el exterior del tubo (53), de tal manera que son casi tangenciales con respecto a la abertura (53b) de aspiración cuando el cuerpo de corte / cuerpo de trituración (54) rota alrededor del eje de rotación (56)
en el que el conducto (125) de aspiración discurre hasta la abertura (53b) de aspiración por fuera del cuerpo de corte / cuerpo de trituración (54),
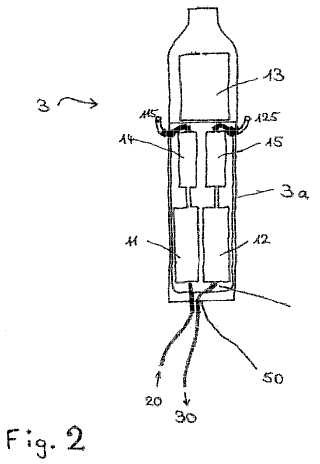
en el que la punta (5) presenta al menos una salida (5a) de orificio del fluido de irrigación para la salida de un fluido de irrigación en el que una salida (5a) de orificio de fluido de irrigación para la salida del fluido de irrigación está dispuesta dentro del tubo (53) del dispositivo para extirpar tejido corporal y en el que el dispositivo de manejo con una sola mano comprende también una bomba (11) de fluido de irrigación la cual está fijada al tubo (3) y está conectada a la salida (5a) del orificio del fluido de irrigación por medio de un conducto (115) de irrigación,
una bomba (12) de aspiración la cual está dispuesta en el tubo (3) y está conectada a la abertura (5b) de aspiración por medio de dicho conducto (125) de aspiración, caracterizado porque dicho eje de rotación (56) está inclinado con respecto a dicho eje longitudinal del tubo (53) o es perpendicular a él, y
un sensor (14) del fluido de irrigación está dispuesto en el conducto (115) de irrigación,
un sensor (15) del fluido de irrigación está dispuesto en el conducto (125) de aspiración y
dicho dispositivo de manejo con una sola mano comprende un control (13), el cual
regula de forma activa la presión intraocular dependiendo de los resultados de la medición de los sensores (14, 15).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/003867.
Solicitante: Mann, Dieter.
Nacionalidad solicitante: Alemania.
Dirección: Berliner Ring 19 63839 Kleinwallstadt ALEMANIA.
Inventor/es: MANN,Dieter, ZELLER,PHILIPP.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61F9/007 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C). › A61F 9/00 Métodos o dispositivos para el tratamiento de los ojos; Dispositivos para colocar las lentes de contacto; Dispositivos para corregir el estrabismo; Aparatos para guiar a los ciegos; Dispositivos protectores de los ojos que se llevan sobre el cuerpo o en la mano (gorras con medios para la protección de los ojos A42B 1/0181; viseras para cascos A42B 3/22; baños para los ojos A61H 35/02; gafas de sol o de protección con las mismas características que las gafas normales G02C). › Métodos o dispositivos para la cirugía ocular.
- A61M1/00 A61 […] › A61M DISPOSITIVOS PARA INTRODUCIR AGENTES EN EL CUERPO O PARA DEPOSITARLOS SOBRE EL MISMO (introducción de remedios en o sobre el cuerpo de animales A61D 7/00; medios para la inserción de tampones A61F 13/26; dispositivos para la administración vía oral de alimentos o medicinas A61J; recipientes para la recogida, almacenamiento o administración de sangre o de fluidos médicos A61J 1/05 ); DISPOSITIVOS PARA HACER CIRCULAR LOS AGENTES POR EL CUERPO O PARA SU EXTRACCION (cirugía A61B; aspectos químicos de los artículos quirúrgicos A61L; magnetoterapia utilizando elementos magnéticos colocados dentro del cuerpo A61N 2/10 ); DISPOSITIVOS PARA INDUCIR UN ESTADO DE SUEÑO O LETARGIA O PARA PONERLE FIN. › Dispositivos de succión o de bombeo de uso médico; Dispositivos para extraer, tratar o transportar los líquidos del cuerpo; Sistemas de drenaje (catéteres A61M 25/00; conectores o acoplamientos para tubos, válvulas o conjuntos de derivación, especialmente concebidos para uso médico A61M 39/00; dispositivos para tomar muestras sanguíneas A61B 5/15; instrumentos para retirar la saliva para dentistas A61C 17/06; filtros para implantar en los vasos sanguíneos A61F 2/01).
PDF original: ES-2432056_T3.pdf
Fragmento de la descripción:
Dispositivo de manejo con una sola mano para cirugía oftálmica.
La invención se refiere a un instrumento quirúrgico, el cual, de modo preferente, puede ser utilizado en cirugía oftálmica, como se divulga en la reivindicación independiente 1.
El documento US 5, 871, 492 describe un sistema y un procedimiento de reducción y extirpación de una lente oftálmica de un ojo de un mamífero. El sistema incluye un dispositivo de sonda rotatorio de reducción de la lente que comprende una vaina tubular externa a través de la cual se extiende un eje de accionamiento rotatorio. Un miembro de cabeza rotatorio de reducción de la lente está situado en el extremo distal del eje de accionamiento.
El documento US 4, 167, 943 describe un instrumento rotatorio de corte quirúrgico, en el que el eje de rotación está dispuesto en paralelo con respecto al eje geométrico longitudinal del instrumento quirúrgico.
El documento WO 99/04700 describe un procedimiento y un aparato para eliminar por irrigación los trombos existentes en el fluido de la vejiga urinaria. En particular, hay un eje central con unas cuchillas de eliminación de trombos montada sobre el mismo, en el que el eje central está rotando alrededor de un eje paralelo con respecto al eje geométrico longitudinal del dispositivo.
El documento US 3, 945, 375 describe un instrumento para extirpar tejido que incluye un miembro de corte rotatorio estriado alojado en un sonda. El eje de rotación está también dispuesto en paralelo con respecto al eje geométrico longitudinal del dispositivo.
En intervenciones quirúrgicas del ojo, en las cuales se retira tejido del ojo, normalmente el material extirpado es sustituido con una solución para perfusión. Esto se lleva a cabo para mantener la presión interna dentro de la cámara del ojo.
Hasta el momento presente se ha utilizado para ello una perfusión controlada por la fuerza de la gravedad, en la que la presión intraocular se corresponde con la presión de perfusión que se determina por la altura de la botella a menos que el material sea extraído del ojo por aspiración, de manera simultánea.
Cuando el material es extraído del ojo por aspiración, de manera simultánea, la presión intraocular efectiva (IOP) proviene del juego recíproco de la tasa de infusión y de la tasa de aspiración. En teoría la presión intraocular será tan alta que la presión intraocular normal se sobrepasa ligeramente y la cámara anterior y la cámara posterior están dispuestas correctamente sin prolapso del tejido intraocular.
Cuando la abertura de aspiración se cierra por las partículas de tejido o cuando la bomba de aspiración se detiene, la IOP se eleva hasta la presión de perfusión que se determina por la altura de la botella. Cuando, por otro lado, la perfusión se obstruye o se cierra, existe el peligro de un descenso de la presión intraocular hasta que el globo ocular colapse. Mediante un cambio de la altura de la botella, incluso al aplicar unos soportes de perfusión accionados por motor, las variaciones de la presión que a menudo se producen en décimas de segundo no pueden ser debidamente compensadas.
En la técnica anterior hay instrumentos, en los cuales está dispuesto en una pieza manual un dispositivo de corte para la extracción de material, en el que una abertura de extracción para la extracción del material cortado por aspiración está situado inmediatamente detrás de la herramienta de corte. Es posible incorporar un diseño en el que un líquido de irrigación o un líquido de perfusión se suministre también a través de la pieza manual. Sin embargo, con ello aumenta el diámetro de la punta del instrumento que se introduce dentro del ojo. Ello, sin embargo, significa que se ha creado una abertura relativamente amplia a través de la cual el instrumento puede ser introducido en el ojo. Por ello resulta desventajoso si tenemos en cuenta el riesgo de infección, el tiempo de cicatrización y los posibles al tejido sano del ojo, como por ejemplo el astigmatismo de la córnea - el cual puede ser inducido al suturar la herida -. Por tanto, normalmente el fluido de irrigación en la cirugía del segmento anterior se suministra por medio de una aguja de perfusión separada, la cual se introduce en el ojo con las dos manos a través de una abertura separada. En la cirugía del segmento posterior, la aguja de perfusión es empleada para formar un cosido en una abertura (tercera ) separada.
Según ya se indicó con anterioridad con el fin de llevar a cabo una cirugía de microincisión, lo que se pretende es conseguir un diámetro de los instrumentos lo más pequeño posible. Por tanto, el diámetro del tubo de aspiración de la pieza manual no es especialmente amplio. Ello puede provocar una obstrucción del tubo por el tejido cortado y aspirado. En este caso, la presión intraocular (una presión normal de alrededor de 15 mmHg, de aproximadamente de 20 cm de columna de agua) se eleva hasta la presión de la botella y permanece en esta altura predeterminada hasta que el tubo de aspiración de nuevo se abre. Con una altura de la botella habitual de 65 cm (aproximadamente 48 mmHg) por encima del ojo del paciente ello sobre el problema de que la presión intraocular se eleva hasta más de tres veces la presión normal. Con ello, pueden producirse diversos daños a.o. del nervio óptico. La elección de una altura inferior de la botella durante la aspiración es desventajosa, porque en este caso existe el peligro de que el globo ocular se derrumbe.
Las variaciones de la presión generan un trabajo físico que actúa sobre las estructuras intraoculares como el endotelio córneo, el iris, el cristalino y su cápsula mediante la modificación de la profundidad de la cámara.
Sin embargo, una oclusión del tubo de aspiración no puede venir solo provocada por el material extirpado. Así mismo, el modo operativo de las herramientas de corte convencionales induce a ello como resultado de la frecuencia de su manejo de apertura y cierre.
A modo de ejemplo, la Fig. 11 muestra una herramienta de corte de la técnica anterior según se describe en el documento US 4, 099, 529. El instrumento consiste en un tubo 911 exterior hueco y un tubo 913 interior hueco el cual está insertado de manera concéntrica dentro de aquél. El tubo 911 exterior hueco presenta una abertura 917 en posición lateral sobre su punta. El tubo de aspiración está situado dentro del tubo interior hueco, de forma que el tejido pueda ser cortado al principio y aspirado por la abertura 917, tras lo cual el tubo 913 interior hueco, que puede ser desplazado linealmente por dentro del tubo 911 interior hueco, se desplaza de tal forma que cierra la abertura 917 con su pared. En este punto, se dispone un borde de corte en el extremo 920 terminal delantero del tubo 913 interior hueco, borde de corte que será escindido por corte respecto del material aspirado al cerrar la abertura (917) . Se puede apreciar que, en un estado en el que la abertura 917 está cerrada, de modo repentino la succión del tubo de aspiración ya no está presente por fuera del instrumento y el material destinado a ser cortado ya no es arrastrado hacia el instrumento de corte y se cae de él. En este estado, la presión intraocular se eleva, lo cual se deriva de una profundidad incrementada de la cámara. La presión inmediatamente se reduce de nuevo cuando el tubo 913 interior desbloquea la abertura 917, por medio de lo cual la profundidad de la cámara resulta menor. Sin embargo, durante la retirada del material mediante el desplazamiento de atrás alante del tubo 913 interior hueco (de corte) se genera fluctuaciones de la presión. Así mismo, por ejemplo, en cirugía del cuerpo vítreo (vitrectomía) el cuerpo vítreo, el cual es temporalmente aspirado y retenido y temporalmente no es aspirado, debido a la existencia de un vacío se aplica con oscilaciones. Estas oscilaciones del cuerpo vítreo pueden ejercer una tracción sobre la retina y de esta forma puede provocar un desprendimiento de la retina o rasgados de la retina.
A la vista de los problemas de la técnica anterior descritos con anterioridad, un objeto de la presente invención es proporcionar un instrumento oftalmológico, en el cual se eviten las fluctuaciones de la presión intraocular. Al mismo tiempo se proporcionará un instrumento, que presente un diámetro de la punta más pequeño y que sea fácil de manejar.
El objeto se consigue mediante un dispositivo de manejo con una sola mano de acuerdo con la reivindicación independiente 1.
Desarrollos adicionales de la invención se especifican en las reivindicaciones dependientes.
Otras características y ventajas de la invención se desprenden de la descripción subsecuente de formas de realización en base a las... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo quirúrgico de manejo con una sola mano que comprende un tubo (3) que incorpora una punta (5) en su extremo delantero, en el que un dispositivo para la extirpación de tejido corporal en una intervención quirúrgica es utilizado como dicha punta,
presentando dicho dispositivo:
un tubo (53) que presenta un eje longitudinal, presentando también el tubo un conducto (125) de aspiración y una abertura (53b) de aspiración para recoger el tejido extirpado,
un cuerpo de corte / cuerpo de trituración (54) que está montado dentro del tubo de tal manera que puede rotar alrededor de un eje de rotación (56) , en el que el cuerpo de corte / cuerpo de trituración (54) , al menos en una parte de su periferia, presenta una pluralidad de bordes (55) de separación,
en el que el cuerpo de corte / cuerpo de trituración (54) está montado de tal manera que los bordes (55) de separación quedan sucesivamente expuestos en la abertura (53b) de aspiración hacia el exterior del tubo (53) , de tal manera que son casi tangenciales con respecto a la abertura (53b) de aspiración cuando el cuerpo de corte / cuerpo de trituración (54) rota alrededor del eje de rotación (56)
en el que el conducto (125) de aspiración discurre hasta la abertura (53b) de aspiración por fuera del cuerpo de corte / cuerpo de trituración (54) ,
en el que la punta (5) presenta al menos una salida (5a) de orificio del fluido de irrigación para la salida de un fluido de irrigación en el que una salida (5a) de orificio de fluido de irrigación para la salida del fluido de irrigación está dispuesta dentro del tubo (53) del dispositivo para extirpar tejido corporal y en el que el dispositivo de manejo con una sola mano comprende también una bomba (11) de fluido de irrigación la cual está fijada al tubo (3) y está conectada a la salida (5a) del orificio del fluido de irrigación por medio de un conducto (115) de irrigación,
una bomba (12) de aspiración la cual está dispuesta en el tubo (3) y está conectada a la abertura (5b) de aspiración por medio de dicho conducto (125) de aspiración, caracterizado porque dicho eje de rotación (56) está inclinado con respecto a dicho eje longitudinal del tubo (53) o es perpendicular a él, y
un sensor (14) del fluido de irrigación está dispuesto en el conducto (115) de irrigación,
un sensor (15) del fluido de irrigación está dispuesto en el conducto (125) de aspiración y
dicho dispositivo de manejo con una sola mano comprende un control (13) , el cual
regula de forma activa la presión intraocular dependiendo de los resultados de la medición de los sensores (14, 15) .
2. Dispositivo de manejo con una sola mano de acuerdo con la reivindicación 1, en el que una luz puede ser guiada por dentro de la punta (5) a través de una guía de luz óptica.
3. Dispositivo de manejo con una sola mano de acuerdo con una de las reivindicaciones 1 a 2, en el que un elemento óptico está dispuesto en la punta (5) que permite la observación del campo quirúrgico.
4. Dispositivo de manejo con una sola mano de acuerdo con una de las reivindicaciones 1 a 3, en el que el cuerpo de corte / cuerpo de trituración (54) presenta la forma de un prisma.
5. Dispositivo de acuerdo con una de las reivindicaciones 1 a 4, en el que el cuerpo de corte / cuerpo de trituración (54) presenta unas palas en la superficie periférica, las cuales están curvadas en la dirección de rotación, en el que los bordes externos de las palas forman los bordes (55) de separación.
6. Dispositivo de acuerdo con una de las reivindicaciones 1 a 5, en el que los bordes (55) de seccionamiento están en paralelo con la superficie periférica del cuerpo cilíndrica de corte / trituración (54) .
7. Dispositivo acuerdo con una de las reivindicaciones 1 a 6, en el que al menos un borde de separación incorpora unas herramientas de desintegración.
8. Dispositivo de acuerdo con una de las reivindicaciones 1 a 7, en el que en el borde de la abertura (53b) de aspiración se forma un borde de contracorte (7) .
9. Dispositivo de acuerdo con una de las reivindicaciones 1 a 8, en el que el borde de separación o las herramientas de desintegración o el borde contracorte está / están fabricado (s) de acero inoxidable, circón o material cerámico.
10. Dispositivo de acuerdo con la reivindicación 9, en el que los cristales de diamante sobresalen del borde de separación o de las herramientas de desintegración o del borde de contracorte.
11. Dispositivo de acuerdo con la reivindicación 9, en el que al menos los bordes de separación o las herramientas de desintegración están cubiertas con diamante sintético.
12. Dispositivo de acuerdo con una de las reivindicaciones 1 a 11, en el que se dispone un motor para hacer rotar el cuerpo de corte / cuerpo de trituración (54) .
13. Dispositivo de acuerdo con la reivindicación 12, en el que el motor puede hacer rotar el cuerpo de corte / cuerpo de trituración (54) en ambas direcciones de rotación o puede hacerlo rotar de manera oscilante.
Patentes similares o relacionadas:
Colector extraíble para un sistema de recogida de residuos médicos/quirúrgicos, incluyendo el colector lengüetas para la alineación del colector, del 15 de Julio de 2020, de STRYKER CORPORATION: Un colector para la conexión a una unidad de recogida de residuos médicos / quirúrgicos , teniendo la unidad de recogida de residuos […]
Dispositivo de cierre de herida por presión negativa, del 24 de Junio de 2020, de UNIVERSITY OF MASSACHUSETTS: Un dispositivo de cierre de heridas por presión negativa, el dispositivo de cierre de heridas comprende: un material de relleno de la herida […]
Módulo para conjunto de sensores de flujo de administración de medicamentos en base a la diferencia de presión para controlar la administración de los medicamentos y método para realizar el mismo, del 24 de Junio de 2020, de ICU MEDICAL, INC.: Un conjunto desechable para usar con un conjunto de sensores, el conjunto desechable que comprende: un cuerpo que tiene una porción de tapa […]
Disposición de aguja, del 24 de Junio de 2020, de SAGA SURGICAL AB: Una disposición de aguja para una aplicación médica, comprendiendo la disposición de aguja: una funda de aguja alargada que tiene una superficie de […]
Control de succión variable, del 17 de Junio de 2020, de Gyrus ACMI, Inc. d/b/a/ Olympus Surgical Technologies America: Un aparato que comprende: un alojamiento que forma un mango y un eje , el eje se extiende desde el mango, y el alojamiento define […]
Boquilla múltiple para conectar un catéter, del 10 de Junio de 2020, de Smhers: Una boquilla múltiple para conectar un catéter (T), en que la boquilla múltiple comprende: una estructura que tiene un orificio interno formado […]
 Dispositivo, así como dispositivo funcional externo y dispositivo de tratamiento para tratar fluidos médicos, del 27 de Mayo de 2020, de FRESENIUS MEDICAL CARE DEUTSCHLAND GMBH: Dispositivo funcional externo con un dispositivo , donde el dispositivo presenta:
- al menos una cámara de recepción de fluido para recibir al menos […]
Dispositivo, así como dispositivo funcional externo y dispositivo de tratamiento para tratar fluidos médicos, del 27 de Mayo de 2020, de FRESENIUS MEDICAL CARE DEUTSCHLAND GMBH: Dispositivo funcional externo con un dispositivo , donde el dispositivo presenta:
- al menos una cámara de recepción de fluido para recibir al menos […]
INTERCAMBIADOR DE HUMOR ACUOSO, del 11 de Mayo de 2020, de GRIMALDOS RUIZ, Pedro: Intercambiador del humor acuoso de la cámara anterior del ojo, caracterizado porque comprende: un tubo de inyección , que incluye un líquido […]