Dispositivo de fijación de una rueda de control de profundidad al chasis de un arado con rejas reversibles que permite la maniobra de inversión positiva, en profundidad de control de profundidad y en posición de transporte.
Dispositivo de fijación de una rueda de control de profundidad (5) al chasis (1) de un arado de rejas reversibles,
siendo el citado chasis (1) portador de dos rampas opuestas de rejas respectivas (2, 3) y que esta montado giratorio en un vehículo tractor alrededor de un eje de inversión A1 para alternativamente colocar por inversión las citadas rampas de rejas (2, 3) en posición de trabajo, siendo llevada en bascula la citada rueda de control de profundidad por el citado chasis (1) por intermedio de un brazo de bascula (11) solidario en una de sus extremidades de un arbol (7) de pivotamiento excentrico de la rueda de control de profundidad (5) en el chasis (1), mientras que la otra extremidad del citado brazo de bascula (11) esta articulada a uno cualquiera de la cabeza de vastago (10) y del cuerpo (9) de un gato hidraulico de doble efecto (8), a su vez articulado al chasis (1), de modo que una maniobra del citado gato (8) permite, en el transcurso de la inversión de las rampas de rejas (2, 3) mantener sensiblemente en un mismo plano que contiene al citado eje de inversión A1, el eje A2 de pivotamiento de la rueda de control de profundidad (5) en el chasis (1) y el centro de gravedad C de la rueda de control de profundidad (5), e inversamente de modo que una maniobra inversa del citado gato (8) permite, posteriormente a la citada inversión, maniobrar positivamente en basculamiento la rueda de control de profundidad (5) hacia el suelo explotando el peso de esta ultima para romper el citado mantenimiento coplanario provocando naturalmente una tendencia del gato (8) a impulsar el citado brazo de bascula (11) en el sentido correspondiente y que comprende medios de regulación de la profundidad del control de profundidad que estan organizados principalmente en medios de limitación de carrera del citado gato (8), para permitir una distancia predeterminada maxima entre el eje de articulación A2 del gato (8) al chasis (1) y el eje A4 de articulación del brazo de bascula (11) al gato (8), caracterizado porque la rueda de control de profundidad (5) esta solidarizada al citado brazo de bascula (11) por intermedio de medios de unión facilmente reversible (20), de modo que la citada unión puede ser rota entre la citada posición de trabajo y una posición de transporte, en cuya posición de transporte la rueda de control de profundidad (5) esta articulada de manera libremente pivotante alrededor de un eje A3 de rotación coaxial con el arbol de pivotamiento (7).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E03013797.
Solicitante: ETABLISSEMENTS GREGOIRE BESSON ET CIE.
Nacionalidad solicitante: Francia.
Dirección: MONTIGNE-SUR-MOINE 49230 MONTFAUCON-SUR-MOINE FRANCIA.
Inventor/es: Fraboulet,Anthony.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A01B3/42 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01B TRABAJO DE LA TIERRA EN AGRICULTURA O EN SILVICULTURA; PARTES CONSTITUTIVAS O ACCESORIOS DE MAQUINAS O INSTRUMENTOS AGRICOLAS, EN GENERAL (apertura o recubrimiento de surcos o de hoyos para la siembra, plantación o abonado A01C 5/00; máquinas para la recogida de raíces o tubérculos A01D; segadoras convertibles en aparatos para trabajo de la tierra o capaces de trabajar la tierra A01D 42/04; segadoras combinadas con instrumentos para trabajo de la tierra A01D 43/12; trabajo de la tierra para obras públicas o explotaciones mineras E01, E02, E21). › A01B 3/00 Arados de reja fija. › Arados de torsión.
PDF original: ES-2383885_T3.pdf
Fragmento de la descripción:
Dispositivo de fijación de una rueda de control de profundidad al chasis de un arado con rejas reversibles que permite la maniobra de inversión positiva, en profundidad de control de profundidad y en posición de transporte.
La presente invención tiene por objeto un dispositivo de fijación de una rueda de control de profundidad al chasis giratorio de un arado remolcable de rejas fijas reversibles.
Se recuerda que en al ambito de la arada se conocen arados remolcables de rejas reversibles. Tales arados estan compuestos principalmente por un chasis equipado con medios de montaje en un vehículo tractor, siendo el citado chasis portador de dos rampas opuestas de rejas respectivas, y por una rueda de control de profundidad para la regulación de la profundidad de la arada de las rejas en curso de trabajo. El citado chasis esta montado giratorio en el vehículo tractor para colocar alternativamente las citadas rampas de rejas en posición de trabajo de acuerdo con la situación a la derecha o la izquierda de las rampas de rejas con respecto al sentido de progresión del vehículo tractor, estando orientada la vertedera de las rejas de una rampa en oposición con respecto a la vertedera de las rejas de la otra rampa. Para invertir las citadas rampas de rejas, el chasis en un primer tiempo es levantado por encima del suelo, despues es invertido para invertir la posición de las rampas de las rejas entre una posición de trabajo y una posición denominada « en el aire », y despues el chasis es abatido hacia el suelo. Se comprendera que estas operaciones son efectuadas con ocasión de la inversión de la progresión del vehículo con respecto al campo que hay que labrar, y por tanto de la situación antes considerada de las rampas de rejas en curso de trabajo, a la derecha o a la izquierda con respecto al citado sentido de progresión del vehículo.
Un problema planteado reside en el cambio de orientación de la rueda de control de profundidad durante el movimiento giratorio del chasis con miras a alternar las respectivas posiciones de trabajo de las rampas de rejas. De modo mas particular, estando orientada la rueda de control de profundidad en posición de trabajo transversalmente al eje de inversión de las rampas de rejas, es necesario orientarla en correspondencia hacia las rejas de una y alternativamente la otra de las citadas rampas, consecutivamente a la inversión de estas ultimas.
Una primera solución, tal como la propuesta por el documento EP0119407 (RABEWERK) , consiste en equipar a cada una de las respectivas rampas de rejas con una rueda de control de profundidad.
Una solución mas habitual consiste en unir la rueda de control de profundidad al chasis de manera pendular, para su puesta en posición de trabajo espontanea consecutivamente a la inversión de las rampas de rejas. Sin embargo, debiendo ser mantenida la rueda de control de profundidad segun una orientación en situación de trabajo hacia la parte trasera con respecto al sentido de progresión del vehículo, su puesta en posición espontanea durante la inversión de las rampas, en razón de su montaje pendular, tiende de manera aleatoria a permitir su basculamiento segun una orientación inadaptada, hacia la parte delantera del vehículo.
Para poner remedio a este inconveniente, se ha propuesto equipar a la rueda de control de profundidad con medios para limitar su carrera pendular de una a otra de las posiciones de inversión de las rampas de rejas. Por ejemplo, por el documento FR2712455 (LEMKEN KG) se ha propuesto equipar a la rueda de control de profundidad con una cadena de retención. Por ejemplo todavfa, por el documento DE3510527 (BAYERISCHE PFLUGFABRIK Gmbh) se ha propuesto equipar a la rueda de control de profundidad con un órgano elastico de compresión, para, por una parte, limitar la carrera de la rueda de control de profundidad y, por otra, frenar su movimiento de cafda durante la inversión de las rampas de rejas.
Debera observarse tambien que es conocido equipar a las ruedas de control de profundidad con medios de regulación de su posición de control de profundidad, es decir de su posición relativa con respecto a las rejas que determina la profundidad de penetración de estas ultimas en el suelo. Podra referirse en particular a los documentos DE4103288 (NIEMEYER) y FR2372581 (RABEWERK) que describen ruedas de control de profundidad equipadas con tales medios de regulación.
Debera observarse finalmente que es conocido equipar a la rueda de control de profundidad con medios de suspensión, que ponen en practica especialmente un gato hidraulico o analogo, para favorecer su resistencia al suelo. Podra referirse por ejemplo al documento DE4031503 (PFLUGFABRIK LEMKEN KG) .
El objetivo de la presente invención es proponer un dispositivo de fijación de una rueda de control de profundidad al chasis giratorio de un arado de rejas reversibles, que permita de modo cierto orientar la rueda hacia la parte trasera con respecto al sentido de progresión del vehículo, consecutivamente a la inversión de las citadas rejas.
El planteamiento inventivo de la presente invención ha consistido en su globalidad en romper las costumbres adquiridas en el ambito consistentes en montar de manera pendular la citada rueda de control de profundidad en el chasis giratorio, proponiendo medios de fijación de la rueda de control de profundidad al chasis que, por una parte, ofrezcan un mantenimiento firme de la rueda de control de profundidad durante la inversión de las rampas de rejas y, por otra, maniobrar la rueda de control de profundidad para su inclinación hacia el suelo en situación de trabajo, despues de la inversión de las rampas de las rejas.
Se plantea un problema que hay que resolver de una maniobra facil de la rueda de control de profundidad despues de la inversión de las rampas de rejas, que ponga en practica medios de estructura simple, habida cuenta de la inversión de la posición de la rueda entre su situación de trabajo y su situación invertida concomitante a la inversión de las rampas de rejas.
Siguiendo el planteamiento inventivo antes indicado, se ha propuesto disponer los citados medios de fijación al chasis de la rueda de control de profundidad de modo que la citada rueda de control de profundidad quede colocada durante la inversión en una posición media entre sus inclinaciones respectivas hacia una y la otra de las rampas de rejas, y eºplotar el peso de la rueda para favorecer su paso desde la citada posición media hacia su posición inclinada de trabajo, al tiempo que sea maniobrada positivamente por los citados medios de fijación.
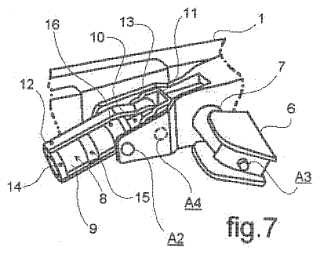
De acuerdo con la presente invención, tal como se reivindica, un dispositivo de fijación de una rueda de control de profundidad al chasis de un arado de rejas reversibles, siendo el citado chasis portador de dos rampas opuestas de rejas respectivas y que esta montado giratorio en un vehículo tractor alrededor de un eje de inversión para alternativamente colocar por inversión las citadas rampas de rejas en posición de trabajo, es principalmente reconocible porque la citada rueda de control de profundidad es llevada en bascula por el citado chasis por intermedio de un brazo de bascula solidario en una de las eºtremidades de un arbol de pivotamiento eºcentrico de la rueda de control de profundidad en el chasis, mientras que la otra eºtremidad del citado brazo de bascula esta articulada a uno cualquiera de la cabeza de vastago y del cuerpo de un gato hidraulico de doble efecto, a su vez articulado al citado chasis.
Estas disposiciones son tales que una maniobra del citado gato permite, en el transcurso de la inversión de las rampas de rejas, mantener sensiblemente en un mismo plano que contiene al citado eje de inversión, por una parte, el eje de pivotamiento de la rueda de control de profundidad en del chasis y, por otra, el centro de gravedad de la rueda de control de profundidad, e inversamente que una maniobra inversa del gato permite, posteriormente a la citada inversión, maniobrar positivamente en basculamiento la rueda de control de profundidad hacia el suelo, eºplotando el peso de esta ultima para romper el citado mantenimiento coplanario provocando naturalmente una tendencia del gato a impulsar el citado brazo de bascula en el sentido correspondiente.
Por maniobra positiva se entendera, a la inversa de una maniobra pasiva espontanea, una maniobra de la rueda de control de profundidad en basculamiento que es provocada voluntariamente por un órgano de potencia de manera controlada, siendo especialmente mantenida y desplazada la rueda de control de profundidad... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de fijación de una rueda de control de profundidad (5) al chasis (1) de un arado de rejas reversibles, siendo el citado chasis (1) portador de dos rampas opuestas de rejas respectivas (2, 3) y que esta montado giratorio en un vehículo tractor alrededor de un eje de inversión A1 para alternativamente colocar por inversión las citadas rampas de rejas (2, 3) en posición de trabajo, siendo llevada en bascula la citada rueda de control de profundidad por el citado chasis (1) por intermedio de un brazo de bascula (11) solidario en una de sus eºtremidades de un arbol (7) de pivotamiento eºcentrico de la rueda de control de profundidad (5) en el chasis (1) , mientras que la otra eºtremidad del citado brazo de bascula (11) esta articulada a uno cualquiera de la cabeza de vastago (10) y del cuerpo (9) de un gato hidraulico de doble efecto (8) , a su vez articulado al chasis (1) , de modo que una maniobra del citado gato (8) permite, en el transcurso de la inversión de las rampas de rejas (2, 3) mantener sensiblemente en un mismo plano que contiene al citado eje de inversión A1, el eje A2 de pivotamiento de la rueda de control de profundidad (5) en el chasis (1) y el centro de gravedad C de la rueda de control de profundidad (5) , e inversamente de modo que una maniobra inversa del citado gato (8) permite, posteriormente a la citada inversión, maniobrar positivamente en basculamiento la rueda de control de profundidad (5) hacia el suelo eºplotando el peso de esta ultima para romper el citado mantenimiento coplanario provocando naturalmente una tendencia del gato (8) a impulsar el citado brazo de bascula (11) en el sentido correspondiente y que comprende medios de regulación de la profundidad del control de profundidad que estan organizados principalmente en medios de limitación de carrera del citado gato (8) , para permitir una distancia predeterminada maºima entre el eje de articulación A2 del gato (8) al chasis (1) y el eje A4 de articulación del brazo de bascula (11) al gato (8) , caracterizado porque la rueda de control de profundidad (5) esta solidarizada al citado brazo de bascula (11) por intermedio de medios de unión facilmente reversible (20) , de modo que la citada unión puede ser rota entre la citada posición de trabajo y una posición de transporte, en cuya posición de transporte la rueda de control de profundidad (5) esta articulada de manera libremente pivotante alrededor de un eje A3 de rotación coaºial con el arbol de pivotamiento (7) .
2. Dispositivo de fijación de una rueda de control de profundidad al chasis de un arado de rejas reversibles de acuerdo con la reivindicación 1 caracterizado porque el citado brazo de bascula (11) esta articulado a la cabeza de vastago (10) del gato (8) , mientras que el cuerpo (9) del gato (8) esta articulado al citado chasis (1) de modo que el eje general de eºtensión del citado gato (8) queda contenido en el citado plano coplanario de mantenimiento.
3. Dispositivo de fijación de una rueda de control de profundidad al chasis de un arado de rejas reversibles de acuerdo con la reivindicación 1 o la reivindicación 2 caracterizado porque los citados medios de unión (20) facilmente reversibles son de tipo de unión por pasador (20) de la rueda de control de profundidad (5) al arbol de pivotamiento (7) .
4. Dispositivo de fijación de una rueda de control de profundidad al chasis de un arado de rejas reversibles de acuerdo con la reivindicación 3, caracterizado porque la rueda de control de profundidad (5) esta soportada por el arbol de pivotamiento (7) por intermedio de un soporte (º) solidario de un brazo de rueda (17) portador de la rueda de control de profundidad (5) , comprendiendo el citado soporte (º) un fuste (18) para su unión coaºial con el arbol de pivotamiento (7) , comprendiendo los citados medios de unión facilmente reversible un pasador desmontable (20) para alternativamente, ya sea unir en rotación el fuste (18) al arbol de pivotamiento (7) en posición de trabajo, o bien liberar en rotación el fuste (18) con respecto al arbol de pivotamiento (7) en posición de transporte.
5. Dispositivo de fijación de una rueda de control de profundidad al chasis de un arado de rejas reversibles de acuerdo con la reivindicación 4, caracterizado porque el citado soporte (º) comprende ademas una cabeza intermedia (19) de fijación del citado brazo de rueda (17) al fuste (18) , siendo la citada cabeza de fijación (19) maniobrable entre dos posiciones correspondientes a las citadas posiciones de trabajo y de transporte, en cada una de cuyas posiciones la cabeza de fijación (19) es solidarizable al fuste (18) y en cuyas posiciones el eje (C) de rotación sobre sí misma de la rueda de control de profundidad (5) esta orientado sensiblemente paralelamente al citado eje A3 en posición de trabajo y sensiblemente ortogonalmente al citado eje A3 en posición de transporte.
º. Dispositivo de fijación de una rueda de control de profundidad al chasis de un arado de rejas reversibles de acuerdo con las reivindicaciones 1 a 5, caracterizado porque los citados medios de limitación de carrera comprenden una armadura (12) de puesta en relación entre el brazo de bascula (11) y un cursor (15) montado móvil a lo largo del cuerpo (9) del gato (8) e inmovilizable en una posición determinada.
7. Dispositivo de fijación de una rueda de control de profundidad al chasis de un arado de rejas reversibles de acuerdo con la reivindicación º, caracterizado porque el cursor (15) constituye un órgano de tope para la citada armadura (12) en la salida del vastago del gato (8) .
8. Dispositivo de fijación de una rueda de control de profundidad al chasis de un arado de rejas reversibles de acuerdo con una cualquiera de las reivindicaciones º a 7, caracterizado porque el cursor (15) esta constituido por un sensor de final de carrera en la salida del vastago del gato (8) , accionable por la citada armadura (12) para interrumpir la alimentación de fluido del citado gato (8) .
9. Dispositivo de fijación de una rueda de control de profundidad al chasis de un arado de rejas reversibles de acuerdo con una cualquiera de las reivindicaciones 7 a 8, caracterizado porque el cursor (15) esta constituido por una tuerca que coopera con un fileteado eºterior dispuesto en el cuerpo (9) del gato (8) .
10. Dispositivo de fijación de una rueda de control de profundidad al chasis de un arado de rejas reversibles de
acuerdo con una cualquiera de las reivindicaciones º a 7, caracterizado porque la citada armadura (12) se apoya en su parte superior contra el eje de articulación del brazo de bascula (11) a la cabeza de vastago (10) del gato (8) , y comprende en su base una plantilla (14) de apoyo contra el cursor (15) , estando la citada plantilla ensartada de manera libremente deslizante sobre el cuerpo (9) del gato (8) .
11. Dispositivo de fijación de una rueda de control de profundidad al chasis de un arado de rejas reversibles de acuerdo con la reivindicación 10, caracterizado porque la armadura (12) y el cuerpo (9) del gato (8) estan ademas articulados coaºialmente al chasis (1) .
12. Dispositivo de fijación de una rueda de control de profundidad al chasis de un arado de rejas reversibles de acuerdo con las reivindicaciones º a 11, caracterizado porque la armadura (12) esta conformada en jaula que comprendeº
º) en su parte superior, una brida (13) de cogida del eje de articulación del brazo de bascula (11) al vastago
(10) del gato (8) , de cuyo eje de articulación la citada brida (13) es solidaria en pivotamiento,
º) en su base, la citada plantilla (14) ensartada de manera libremente deslizante sobre el cuerpo (9) del gato (8) ,
º) en su zona media, un collarfn (1º) que rodea el cuerpo (9) del citado gato (8) , por intermedio de cuyo 20 collarfn (1º) , la armadura (12) y el cuerpo (9) del gato (8) estan articulados conjuntamente al chasis (1) .
13. Dispositivo de fijación de una rueda de control de profundidad al chasis de un arado de rejas reversibles de acuerdo con una cualquiera de las reivindicaciones 1 a 2, caracterizado porque los citados medios de limitación de carrera comprenden medios de control y de mando de la puesta en practica del citado gato (8) , asociando los citados medios de control y de mando órganos de limitación de la carrera del vastago (10) del gato (8) y medios de mando distantes localizados en el interior del habitaculo del vehículo tractor.
Patentes similares o relacionadas:
Arado con un dispositivo para levantar por lo menos una cama de arado, del 4 de Abril de 2018, de KUHN-HUARD S.A.: Arado que presenta un bastidor en el que está montada por lo menos una cama de arado por medio de una carcasa respectiva , comprendiendo la cama de arado […]
 Arado semi-montado, del 6 de Agosto de 2013, de ALOIS POTTINGER MASCHINENFABRIK GES. M.B.H.: Arado semi-montado con un soporte de montaje , presenta puntos de articulación de bielas superiores e inferiores para bielas superiores e inferiores de […]
Arado semi-montado, del 6 de Agosto de 2013, de ALOIS POTTINGER MASCHINENFABRIK GES. M.B.H.: Arado semi-montado con un soporte de montaje , presenta puntos de articulación de bielas superiores e inferiores para bielas superiores e inferiores de […]
UN ARADO MULTIPLE PERFECCIONADO., del 16 de Noviembre de 1997, de CASTILLON CAPDEVILLA, JOSE MARIA: 1. UN ARADO MULTIPLE PERFECCIONADO, EN PARTICULAR DEL TIPO QUE COMPRENDE UNA VARA O CHASIS SUSCEPTIBLE DE EFECTUAR UNA VUELTA DE 180 ALREDEDOR DE […]
PERFECCIONAMIENTO EN LOS ARADOS DOTADOS DE UN DISPOSITIVO DEL DESVIO Y, EVENTUALMENTE, DE LA INCLINACION., del 16 de Octubre de 1994, de CHARRUES NAUD: EL ARADO COMPRENDE UNA CABEZA DE SOPORTE EQUIPADA CON UN PIVOTE Y CON UN EJE QUE LLEVAN RESPECTIVAMENTE EL BASTIDOR Y UN BRAZO DE SOPORTE CUYO OTRO […]
MECANISMO EN UNA RUEDA COMBINADA DE TRANSPORTE Y PROFUNDIDAD EN UN ARADO GIRATORIO, del 16 de Mayo de 1991, de KVERNELAND KLEPP AS: MECANISMO EN UNA RUEDA COMBINADA DE TRANSPORTE Y PROFUNDIDAD EN UN ARADO GIRATORIO, LA CUAL 810) VA MONTADA EN UNA HORQUILLA FORMADA CON UN PIVOTE […]
"PERFECCIONAMIENTOS EN LAS RUEDAS DE GALGA DE MAQUINAS AGRICOLAS REVERSIBLES"., del 1 de Febrero de 1983, de COMPAGNIE FRANCAISE DE MACHINES AGRICOLES: RUEDAS DE GALGA PARA MAQUINAS AGRICOLAS, EN PARTICULAR, PARA ARADOS REVERSIBLES. CONSTAN DE UN BRAZO QUE SOPORTA EN UNA DE SUS EXTREMIDADES UN EJE SOBRE EL […]
PERFECCIONAMIENTOS EN LOS ARADOS PORTANTES REVERSIBLES, del 16 de Abril de 1981, de SOCIETE D'EXPLOITATION DES CHARRUES NAUD: ARADO REVERSIBLE, SOSTENIDO EN LA PARTE DELANTERA DEL TRACTOR Y QUE TRABAJA POR EMPUJE. COMPRENDE UNA CUNA , QUE SOPORTA LAS REJAS Y LAS VERTEBRAS , QUE […]
 PERFECCIONAMIENTOS EN INVERSIONES SEMI-AUTOMÁTICAS ADAPTABLES APOYADOS EN TRES PUNTOS, del 1 de Septiembre de 1960, de ETABLISSEMENTS P. VIAUD & COMPAGNIE, S.A: Perfeccionamientos en inversiones semiautomáticas adaptables rápidamente para arados reversibles apoyados en tres puntos, caracterizándose […]
PERFECCIONAMIENTOS EN INVERSIONES SEMI-AUTOMÁTICAS ADAPTABLES APOYADOS EN TRES PUNTOS, del 1 de Septiembre de 1960, de ETABLISSEMENTS P. VIAUD & COMPAGNIE, S.A: Perfeccionamientos en inversiones semiautomáticas adaptables rápidamente para arados reversibles apoyados en tres puntos, caracterizándose […]