Carro de mantenimiento.
Dispositivo (202) para el mantenimiento y/o inspección de un sistema de manipulación de materiales (204),
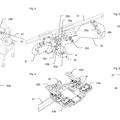
donde el dispositivo está adaptado para ser movido a lo largo de una pista (214) del sistema de manipulación de materiales y está adaptado para el mantenimiento y/o la inspección del sistema de manipulación de materiales o sus componentes situados en, o adyacentes a, la pista (214) y está adaptado para ser controlado a través de una interfaz de usuario (226, 510), caracterizado porque el dispositivo comprende
- al menos una sección desplazable, tal como una trampilla y/o una superficie de soporte de deslizamiento (216, 602, 706, 708, 710, 902 ó 1002), que es desplazable entre una primera y una segunda posición en el dispositivo, donde
dicha sección en la primera posición evita que una persona llevada en el dispositivo acceda manualmente a un área del sistema de manipulación de materiales con partes del sistema de manipulación de materiales que se mueven relativamente respecto al dispositivo durante el movimiento del dispositivo o durante la operación del sistema de manipulación de materiales, y donde dicha sección colocada en la segunda posición permite a la persona que 15 acceda a partes del sistema de manipulación de materiales que se mueven relativamente respecto al dispositivo durante el movimiento del dispositivo o durante la operación del sistema de manipulación de materiales.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DK2010/050096.
Solicitante: CRISPLANT A/S.
Nacionalidad solicitante: Dinamarca.
Dirección: P.O. PEDERSENS VEJ 10 8200 AARHUS N. DINAMARCA.
Inventor/es: LYKKEGAARD,UFFE, JENSEN,LASSE LUND, AUTZEN,SØREN FRIIS, KNUDSEN,CARL CHRISTIAN VAD.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25H5/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25H UTILLAJE DE TALLER, p. ej. PARA EL TRAZADO DE LAS PIEZAS QUE VAN A SER TRABAJADAS; DISPOSICION DE LOS TALLERES. › Soportes o medios de colocación de las piezas, instrumentos o herramientas, utilizadas en relación con vehículos; Soportes para operarios, p. ej. plataformas rodantes para mecánicos.
PDF original: ES-2453976_T3.pdf
Fragmento de la descripción:
Carro de mantenimiento Campo de la invención La presente invención se refiere al mantenimiento de un sistema de manipulación de materiales y, en particular, a un dispositivo de mantenimiento y a un procedimiento de mantenimiento del sistema de manipulación de materiales.
Tal dispositivo se conoce a partir del documento US 2005/0051048A1.
Antecedentes de la invención Un sistema de manipulación de materiales es un sistema en el que los materiales son manipulados transportándolos de acuerdo con un destino determinado y que puede comprender la clasificación de tales materiales de acuerdo con tales destinos. Debe entenderse que los materiales manipulados en los ejemplos del presente documento son artículos tales como paquetes postales o equipajes de aeropuerto y artículos similares de varios tamaños y formas.
Estos materiales se transportan en el sistema de manipulación de materiales, tal como en una bandeja basculante de un clasificador de bandeja basculante, donde las bandejas basculantes están comprendidas en un clasificador de bucle cerrado con una cadena de bucle cerrado que funciona en una pista para la manipulación de materiales. Alternativamente, los materiales, por ejemplo, son transportados en bolsas, tales como bolsas movidas por una cinta de transmisión o un rodillo en varios otros tipos de sistemas de manipulación de materiales. Todavía adicionalmente, los materiales pueden ser movidos por una fuerza para mover los materiales que se aplican directamente a una superficie de los materiales.
La elección de material del tipo de sistema de manipulación o la elección de una combinación de varios de los tipos mencionados u otros tipos no mencionados similares depende de los tipos de material a manipular, su tamaño, peso, etc., así como la capacidad de manipulación de materiales que sea necesaria en un sitio dado de manipulación de material.
Existen numerosos tipos de sitios con sistemas de manipulación de materiales de los tipos mencionados, y los ejemplos concretos son centros de paquetes postales, centros de distribución de pedidos por correo y aeropuertos.
Independiente del tipo de sitio o tipo (s) de los equipos y los sistemas de manipulación de materiales utilizados, los sistemas de manipulación de materiales por lo general requieren por lo menos un poco de mantenimiento preventivo. En algunos casos, los componentes también necesitan cambiarse inmediatamente debido a la carga de trabajo imprevista repentina o muchos años de uso extensivo, y con ello muchos años de deterioro por uso.
Algunos sistemas de manipulación de materiales en sitios como centros postales y los aeropuertos pueden incluir varios cientos de metros o incluso varios kilómetros de pistas de las líneas de manipulación de materiales, tales como líneas de transporte o líneas de manipulación de materiales o bucles para la clasificación de los materiales en función de su destino.
Por lo tanto, el mantenimiento de estos sistemas y garantizar la disponibilidad de este tipo de sistemas, que pueden utilizarse durante 20 horas de manipulación de material o más por día, más o menos todos los días del año pueden requerir varias personas para llevar a cabo tareas de mantenimiento, tales como la inspección de los sistemas, que llevan a cabo el mantenimiento preventivo o intercambio de los componentes deteriorados.
Además, y en algunos períodos críticos del día, incluso un mínimo de falta de disponibilidad de los sistemas puede incurrir en que se pospongan vuelos, etc., o que no lleguen paquetes a tiempo a su destino, y es de suma importancia que los sistemas tengan la disponibilidad óptima y, por lo tanto, si debe llevarse a cabo el mantenimiento en un momento determinado o si se produce una rotura, los sistemas se mantienen o se reparan lo más rápido posible.
Los dispositivos y procedimientos conocidos utilizados para el mantenimiento de este tipo de sistemas de manipulación de materiales son muy simples e incluyen a una persona de mantenimiento caminando en el lugar y realizando la inspección, el mantenimiento preventivo, el mantenimiento o reparación con diversas herramientas de mano que se llevan a una posición de mantenimiento, donde se va a proporcionar el mantenimiento.
El personal de mantenimiento normalmente realiza la tarea de mantenimiento a realizar, por ejemplo, subiendo una escalera para llegar cerca de la pista de manipulación de materiales y/o componentes de la misma y mientras está en esta escalera, o mientras están colocados en otros tipos similares adecuados, al menos en parte, de los equipos.
Un ejemplo de un tipo de mantenimiento preventivo que es probable que se realice es la limpieza de los componentes de una o más pistas o componentes comprendidos en o sobre o adyacentes a la pista, por ejemplo, mediante la limpieza con un limpiador de vacío. A menudo, el mantenimiento preventivo también incluye la inspección visual de los sistemas y componentes de los mismos.
Las pistas de manipulación de materiales se proporcionan a menudo a una altura elevada sobre el nivel del suelo en un edificio en el que están presentes las pistas. De esta manera, el acceso se puede proporcionar por debajo de las pistas para otras pistas de manipulación de materiales, personal, camiones o vehículos similares con o sin motor, con o sin tripulación.
Las pistas pueden ser de difícil acceso debido a las plataformas de soporte de los distintos tipos de equipos, o por líneas de destino, llamadas rampas u otros tipos de equipos, lo que, visto desde el punto de vista del mantenimiento son obstáculos, si bien son importantes y típicos en sitios de manipulación de materiales.
Por lo tanto, el mantenimiento preventivo, el mantenimiento o la reparación, o incluso la simple inspección de los sistemas de manipulación de materiales han demostrado ser difíciles y requieren mucho tiempo.
Además, en algunos casos las condiciones sobre el terreno, por ejemplo, en combinación con el entusiasmo del personal de mantenimiento para mantener la más alta disponibilidad del sistema, se conoce que es un reto, o incluso imposible, llevar a cabo tareas de mantenimiento o de inspección, con dispositivos y procedimientos conocidos, asegurando al mismo tiempo una seguridad del personal que sea satisfactoria.
Por otra parte, y a modo de ejemplo, el mantenimiento o el mantenimiento preventivo no se realizan o no se realizan con la suficiente frecuencia, a la vista de los programas de mantenimiento previstos, debido a la falta de seguridad en la realización del mantenimiento o debido a la molestia de llevar a cabo el mantenimiento de una manera segura. Como una posible consecuencia de esto, se produce una pérdida de la disponibilidad.
Por lo tanto, los inventores de la presente invención han apreciado que un dispositivo mejorado para el mantenimiento y el procedimiento de mantenimiento de un sistema de manipulación de materiales, es decir, el mantenimiento y/o la prestación de inspección del sistema de manipulación de materiales es beneficioso, y en consecuencia han ideado la presente invención.
Sumario de la invención Puede verse como un objeto de la presente invención proporcionar un dispositivo mejorado para el mantenimiento y/o inspección de un sistema de manipulación de materiales y un procedimiento mejorado de mantenimiento y/o un procedimiento mejorado la prestación de inspección de un sistema de manipulación de materiales.
Preferentemente, la invención alivia, atenúa o elimina uno o más de las anteriores u otras desventajas solas o en cualquier combinación.
Alternativa o adicionalmente, puede ser visto como un objetivo proporcionar un dispositivo y procedimiento para el mantenimiento y/o la prestación de inspección de un sistema de manipulación de materiales con una capacidad de posicionamiento precisa del dispositivo en una posición donde se requiere un mantenimiento y/o una inspección.
Además, y de forma alternativa o adicional, puede ser visto como un objetivo proporcionar un dispositivo y procedimiento para el mantenimiento y/o la prestación de inspección de un sistema de manipulación de materiales con una posibilidad ampliada de inspección y de limpieza en comparación con los dispositivos y procedimientos existentes.
En particular, aunque alternativamente o adicionalmente a los otros objetos posibles descritos, puede ser visto como un objeto de la invención proporcionar un dispositivo y un procedimiento para el mantenimiento y/o la prestación de inspección de un sistema de manipulación de materiales, al tiempo que proporciona una mayor seguridad.
Por consiguiente, se proporciona, de acuerdo con un aspecto del aparato de la invención, un dispositivo para el mantenimiento... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo (202) para el mantenimiento y/o inspección de un sistema de manipulación de materiales (204) , donde el dispositivo está adaptado para ser movido a lo largo de una pista (214) del sistema de manipulación de materiales y está adaptado para el mantenimiento y/o la inspección del sistema de manipulación de materiales o sus componentes situados en, o adyacentes a, la pista (214) y está adaptado para ser controlado a través de una interfaz de usuario (226, 510) , caracterizado porque el dispositivo comprende
-al menos una sección desplazable, tal como una trampilla y/o una superficie de soporte de deslizamiento (216, 602, 706, 708, 710, 902 ó 1002) , que es desplazable entre una primera y una segunda posición en el dispositivo, donde
dicha sección en la primera posición evita que una persona llevada en el dispositivo acceda manualmente a un área del sistema de manipulación de materiales con partes del sistema de manipulación de materiales que se mueven relativamente respecto al dispositivo durante el movimiento del dispositivo o durante la operación del sistema de manipulación de materiales, y donde dicha sección colocada en la segunda posición permite a la persona que acceda a partes del sistema de manipulación de materiales que se mueven relativamente respecto al dispositivo durante el movimiento del dispositivo o durante la operación del sistema de manipulación de materiales.
2. Dispositivo de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el dispositivo comprende medios (220) para habilitar o deshabilitar el desplazamiento de la al menos una sección y en el que la al menos una sección es desplazable sólo en respuesta a uno o más criterios que se satisfacen.
3. Dispositivo de acuerdo con cualquiera de las reivindicaciones anteriores, en el que la al menos una sección (216, 602, 706, 708, 710, 902, 1002) y el dispositivo está adaptado con tamaños y dicha sección está adaptada con una primera y segunda posiciones, de modo que permita a una persona que sea transportada a lo largo de la pista (214) del sistema de manipulación de materiales en el dispositivo mientras está colocada en una postura de mantenimiento en el dispositivo.
4. Dispositivo de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el dispositivo comprende medios de conexión (210) para la conexión de equipos de seguridad, tales como una cuerda (212) , al dispositivo para escapar del dispositivo desde una altura elevada del dispositivo.
5. Dispositivo de acuerdo con cualquiera de las reivindicaciones anteriores, en el que la interfaz de usuario (226, 510) comprende una interfaz de usuario fija en el dispositivo, para introducir peticiones de control para controlar el dispositivo.
6. Dispositivo de acuerdo con cualquiera de las reivindicaciones anteriores 1 a 4, en el que la interfaz de usuario comprende una interfaz de usuario inalámbrica manual que se coloca en el dispositivo, para introducir peticiones de control para controlar el dispositivo.
7. Dispositivo de acuerdo con cualquiera de las reivindicaciones anteriores, en el que dicha sección se proporciona como al menos una trampilla (216, 602, 706, 708 ó 710) .
8. Dispositivo de acuerdo con la reivindicación 7, en el que dicha trampilla es desplazable entre dichas primera y segunda posiciones para habilitar el mantenimiento y/o la inspección del sistema de manipulación de materiales a través de la trampilla cuando la trampilla está en la segunda posición.
9. Dispositivo de acuerdo con cualquiera de las reivindicaciones anteriores, en el que dicha sección se proporciona como al menos una superficie de soporte de deslizamiento (902, 1002) .
10. Dispositivo de acuerdo con la reivindicación 9, en el que dicha superficie de soporte de deslizamiento (902, 1002) es desplazable entre dichas primera y segunda posiciones para habilitar el mantenimiento y/o la inspección del sistema de manipulación de materiales desde dicha superficie de soporte de deslizamiento cuando la superficie de soporte de deslizamiento está en la segunda posición.
11. Dispositivo de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el dispositivo es operable acoplado al sistema de control (318, 508) , que es operable acoplado a unos medios de alimentación (320, 506) para proporcionar potencia para transportar el dispositivo (202) a lo largo de la pista (214) .
12. Dispositivo de acuerdo con la reivindicación 11, en el que el dispositivo comprende además medios de transmisión inalámbricos (302) y el dispositivo y los medios de transmisión inalámbricos están adaptados para enviar señales de control inalámbricas (316) para iniciar o detener o ajustar la velocidad de transporte del dispositivo (202) desde el dispositivo (202) al sistema de control (318) , y así para los medios de potencia (320) para habilitar iniciar, detener o ajustar la velocidad de transporte.
13. Dispositivo de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el dispositivo está adaptado
para la obtención de señales correspondientes a una velocidad de transporte del dispositivo. 17
14. Dispositivo de acuerdo con la reivindicación 13, en el que un criterio para habilitar que dicha sección (216, 602, 706, 708, 710, 902, 1002) sea desplazada desde la primera a la segunda posición es que una velocidad de transporte del dispositivo sea cero o sustancialmente cero.
15. Dispositivo de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el dispositivo está comprendido en una cadena de accionamiento (322) de un sistema de manipulación de materiales (204) .
16. Dispositivo de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el dispositivo está adaptado para su fijación o su incorporación a una cadena de accionamiento (322) de un sistema de manipulación de materiales, tal como un clasificador de bandeja basculante de bucle cerrado (103) o un clasificador de cinta transversal de bucle cerrado.
17. Dispositivo de acuerdo con cualquiera de las reivindicaciones anteriores 1 a 15, en el que el dispositivo está adaptado para el transporte a lo largo de una pista (214) de un sistema de manipulación de materiales, tal como un sistema de manipulación de materiales adaptado para el transporte de artículos en cintas accionadas (402) o rodillos accionados.
18. Dispositivo de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el dispositivo comprende además medios de detección, tales como una cámara (604, 605, 607) , para la detección de tareas de mantenimiento en o adyacente a la pista del sistema de manipulación de materiales.
19. Sistema de manipulación de materiales (102, 204) que comprende un dispositivo de acuerdo con cualquiera de las reivindicaciones anteriores.
20. Procedimiento de mantenimiento y/suministro de inspección de un sistema de manipulación de materiales (102, 204) , comprendiendo el procedimiento
-habilitar el movimiento (802) de un dispositivo (202) que comprende al menos una sección desplazable (216, 602, 706, 708, 710, 902, 1002) a lo largo de una pista (214) del sistema de manipulación de materiales,
-mantener (804) y/o proporcionar la inspección (805, 807) del sistema de manipulación de materiales o componentes del mismo colocados sobre o adyacentes a la pista (214) desde el dispositivo,
-controlar la operación del dispositivo a través de un sistema de control que permita el control del dispositivo, en el que el procedimiento comprende además
-introducir señales de control al sistema de control para iniciar, detener, ajustar la velocidad de transporte o para iniciar, detener o controlar un procedimiento de mantenimiento automatizado como peticiones introducidas manualmente (810) o como peticiones generadas automáticamente (811) como señales de control que se generan de forma automática y
-desplazar dicha sección (216, 602, 706, 708, 710, 902, 1002) a partir de una primera a una segunda posición en el dispositivo, donde dicha sección en la primera posición se impide que una persona acceda manualmente al dispositivo a un área del sistema de manipulación de materiales con partes del sistema de manipulación de materiales que se mueven relativamente respecto al dispositivo durante el movimiento del dispositivo o durante la operación del sistema de manipulación de materiales, y donde dicha sección colocada en la segunda posición permite que la persona acceda a dichas partes, y
-realizar el mantenimiento manual del sistema de manipulación de materiales cuando dicha sección está colocada en dicha segunda posición.
21. Procedimiento de acuerdo con la reivindicación 20, en el que las señales de control generadas automáticamente se proporcionan en respuesta a las detecciones proporcionadas por uno o más sistemas de detección, tales como una o más cámaras (604, 605, 607) , provistas a bordo del dispositivo.
22. Procedimiento de acuerdo con cualquiera de las reivindicaciones 20 ó 21, en el que la persona (208, 606) a a ser transportada mediante el dispositivo se proporciona para realizar el mantenimiento manual y/o para introducir peticiones de control (810) y/o para realizar la inspección del sistema de manipulación de materiales (204) .
23. Procedimiento de acuerdo con cualquiera de las reivindicaciones anteriores 20 a 22, que comprende además las etapas del procedimiento de
-detener el transporte del dispositivo de mantenimiento (202) en una posición a lo largo de la pista (214) ,
-realizar un procedimiento manual o automatizado de mantenimiento o inspección en o adyacente a dicha posición.
24. Procedimiento de acuerdo con cualquiera de las reivindicaciones anteriores 20 a 23, en el que dicha sección
(216, 602, 706, 708, 710, 902, 1002) sólo puede ser desplazada desde la primera a la segunda posición cuando la velocidad de transporte del dispositivo (202) es cero o sustancialmente cero.
25. Procedimiento de acuerdo con cualquiera de las reivindicaciones anteriores 20 a 24, que comprende además el mantenimiento de una postura de la persona en el dispositivo (202) , mientras el dispositivo es movido a lo largo de la
pista (214) del sistema de manipulación de materiales (204) a una nueva posición del sistema de manipulación de materiales que requiere el mantenimiento y/o la inspección y mientras se realiza el mantenimiento y/o mientras se realiza la inspección.
26. Procedimiento de acuerdo con cualquiera de las reivindicaciones anteriores 20 a 25, que comprende además detener el dispositivo (202) en una o más posiciones predeterminadas a lo largo de la pista (214) , cuya una o más 10 posiciones se pueden establecer manual o automáticamente.
27. Procedimiento de acuerdo con cualquiera de las reivindicaciones anteriores 20 a 26, en el que dicho mantenimiento manual se realiza a través de una abertura (610) , tal como un orificio de la trampilla, cuya apertura es provisto cuando se desplaza dicha sección a la segunda posición.
28. Procedimiento de acuerdo con cualquiera de las reivindicaciones anteriores 20 a 27, en el que dicho
mantenimiento manual se realiza a través de una abertura (906, 1004) , tal como en una cabina (904) o un chasis, cuya abertura se hace accesible cuando se desplaza dicha sección a la segunda posición.
Patentes similares o relacionadas:
 Utillaje de preparación de salpicaderos, del 27 de Noviembre de 2019, de PSA Automobiles SA: Utillaje de preparación de salpicaderos de vehículos que comprende:
- un bastidor ,
- al menos un dispositivo de anclaje de travesaño (20a, 20b) dispuesto […]
Utillaje de preparación de salpicaderos, del 27 de Noviembre de 2019, de PSA Automobiles SA: Utillaje de preparación de salpicaderos de vehículos que comprende:
- un bastidor ,
- al menos un dispositivo de anclaje de travesaño (20a, 20b) dispuesto […]
CARRO MOTORIZADO PARA OPERADOR EN POSICIÓN DE RODILLAS, del 3 de Agosto de 2017, de CANDIOTTE CHINCARO, Elena Francisca: El Carro Motorizado para Operador en Posición de Rodillas consta de: Una Plataforma base (A) provista de soportes ergonómicos para las rodillas y las pantorrillas (D) que […]
SOPORTE Y TALLER DE BICICLETAS PARA REPARACIÓN Y LIMPIEZA EN ESPACIOS PÚBLICOS, del 18 de Mayo de 2015, de MARTIN SANCHEZ, David: 1. Soporte y taller de bicicletas para reparación y limpieza en espacios públicos, caracterizado por estar formado al menos por dos estructuras a modo […]
MALETIN PLASTICO., del 16 de Abril de 2005, de RIBERA LLOVET,ANTONIO CACERES VEGA,RUFINO: 1. Maletín plástico, del tipo de los constituidos por dos semicarcasas moldeadas en material plástico y abisagradas entre sí, las cuales incorporan […]
CARRO DE SOPORTE PARA UNIDAD DE DIAGNOSTICO ELECTRONICO PARA UN VEHICULO INDUSTRIAL., del 16 de Marzo de 2004, de IVECO FIAT S.P.A.: LA CARRETILLA LLEVA UNA REPISA DE APOYO PARA EL EQUIPO QUE SE MONTA SOBRE UNA COLUMNA VERTICAL QUE PUEDE GIRAR SOBRE SU PROPIO […]
DISPOSITIVO PARA EL MOVIMIENTO DE CUERPOS EN EL ESPACIO., del 1 de Noviembre de 2001, de HOLLE, AXEL: LA INVENCION SE REFIERE AL MOVIMIENTO DEL CUERPO EN EL ESPACIO, ESPECIALMENTE PARA SERES HUMANOS, Y COMPRENDE UN DISPOSITIVO QUE PRODUCE UN MOVIMIENTO ESFERICO, […]
DISPOSITIVO PARA LA PUESTA A DISPOSICION DE HERRAMIENTA Y MATERIAL, del 16 de Diciembre de 1998, de ADOLF WURTH GMBH & CO. KG: UN DISPOSITIVO PARA LA PUESTA A DISPOSICION DE HERRAMIENTA Y MATERIAL CONTIENE UNA ESTRUCTURA, QUE SE COMPONE DE FORMA CONJUNTA A PARTIR DE UN ELEMENTO […]
SOPORTE PARA BICICLETAS, del 1 de Febrero de 2007, de MECANICA J PARENTE S.L.: 1. Soporte para bicicletas , que comprende una base de apoyo al suelo y medios de apoyo (5a, 5b) del chasis de la bicicleta […]