Aplicador para grapas quirúrgicas.
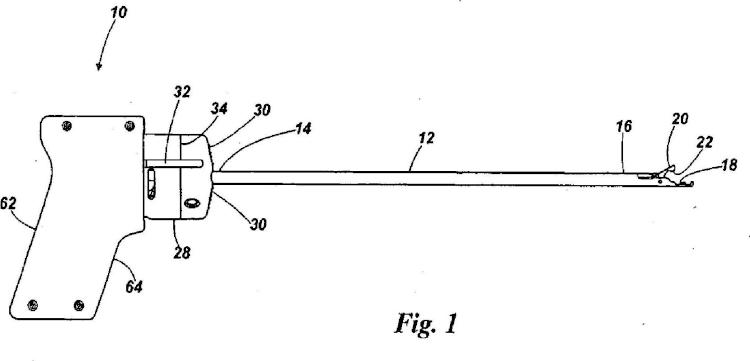
Un aplicador (10) de grapas quirúrgicas operable manualmente, comprendiendo el aplicador (10):
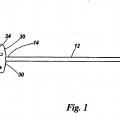
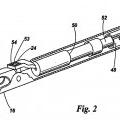
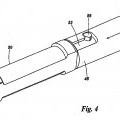
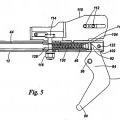
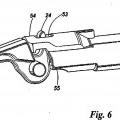
un cilindro (12), teniendo el cilindro (12) un primer extremo (14) y un segundo extremo (16), estando formado el segundo extremo (16) para acomodar una grapa quirúrgica;
una palanca (20) de apriete;
un disparador (28); y
un mango (62);
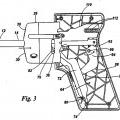
en el que el mango (62) incluye:
una primera palanca (72) que tiene un primer extremo (74) y un segundo extremo (76), estando conectado el primer extremo (74) de la primera palanca (72) de manera pivotante en el mango (62), estando conectado el segundo extremo (76) de la primera palanca (72) de manera deslizable al disparador (28); y
una segunda palanca (88) que tiene un primer extremo (90), un segundo extremo (92) y una región central (94), estando conectada la región central (94) de la segunda palanca (88) de manera pivotante al mango (62), estando configurado el primer extremo (90) de la segunda palanca (88) para deslizarse a lo largo de la longitud de la primera palanca (72), estando adaptado el segundo extremo (92) de la segunda palanca (88) para operar la palanca (20) de apriete;
estando configuradas la primera palanca (72) y la segunda palanca (88) para proporcionar una ventaja mecánica entre el disparador (28) y la palanca (20) de apriete, provocando el movimiento del disparador (28) durante su uso el movimiento de la palanca (20) de apriete, dando como resultado el forzado de una grapa quirúrgica de una posición abierta a una posición cerrada;
estando el aplicador (10) de grapas quirúrgicas caracterizado por que el mango (62) incluye además una placa (110) de colocación, estando asegurada la placa (110) de colocación al cilindro (12) por un perno (114) de retención, estando asegurada además la placa (110) de colocación al mango (62) por una sujeción (112) de la placa de colocación, estando adaptada la placa de colocación para limitar el movimiento del disparador en una posición que coincide con la posición cerrada.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2009/002347.
Solicitante: Femcare-Nikomed Limited.
Nacionalidad solicitante: Reino Unido.
Dirección: Stuart Court Spursholt Place Salisbury Road Romsey, Hampshire SO51 6DJ REINO UNIDO.
Inventor/es: MCDERMENT, IAIN GRIERSON, JOHN,JAMES DANIEL, BRIANT,JOHN PHILIP, MILES,DESMOND JOHN, STREETER,ADRIAN JOHN, HARRISON,NICK, EDDINGTON,ROBIN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/128 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › para aplicar o quitar clamps o pinzas.
PDF original: ES-2544489_T3.pdf
Fragmento de la descripción:
Aplicador para grapas quirúrgicas
Antecedentes
La presente solicitud se refiere a aplicadores para grapas quirúrgicas, y más en particular a aplicadores para la inserción y cierre de grapas quirúrgicas.
Dichos aplicadores están concebidos para que los opere con una sola mano el cirujano que esté operando. Ejemplos de dichos aplicadores se describen en las solicitudes de patente internacional con número de publicación WO 2005/039422 y WO-A-01/12079, y en el modelo de utilidad alemán número DE 90 15 046.
Dichas grapas pueden utilizarse para la esterilización o para otros fines médicos, ortopédicos o quirúrgicos. Un ejemplo es la grapa "Filshie" que se desvela en la patente del Reino Unido número 2177748.
Ciertos aplicadores conocidos para dichas grapas, como por ejemplo los desvelados en el documento WO 2005/039422 y DE 90 15 046 en los que se basa el preámbulo de la reivindicación 1, utilizan una varilla de empuje y un mecanismo de unión asociado para provocar la rotación de una mordaza articulada para producir fuerzas de compresión en una grapa y comprimir así la grapa provocando así que se cierre, preferentemente con una acción de bloqueo. Las fuerzas de compresión en la varilla de empuje relativamente fina provocan fuerzas de reacción radiales y la consiguiente fricción en la interfaz entre la varilla de empuje y el tubo externo. Esto puede dar como resultado que el mecanismo del aplicador se quede atascado en la posición cerrada, provocando así problemas al cirujano que esté operando para desengranar el aplicador de la grapa cerrada.
En el documento US 2007/0179499 A1 se desvelan unas palancas que proporcionan una ventaja mecánica.
Otro problema de los aplicadores conocidos es la necesidad de ajustar el recorrido del mecanismo para lograr el cierre correcto de la grapa en una posición fiable; dicho ajuste puede resultar difícil de conseguir. Es importante que la grapa quirúrgica se cierre en una posición fiable. Si la grapa se cierra demasiado apretado, la anatomía tubular puede romperse, siendo necesario que el cirujano aplique más grapas a los extremos rotos de la anatomía tubular. Por el contrario, si las grapas aplicadas no se cierran lo suficientemente apretados, la anatomía tubular puede no ocluirse adecuadamente.
Otro problema de los aplicadores conocidos es el requisito de que el aplicador deber estar fabricado de componentes caros para garantizar que las grapas quirúrgicas puedan cerrarse de manera fiable, y que puedan realizar muchas operaciones de cierre de la grapa. En particular, en una pieza de instrumental médico tan importante, y especialmente una en la que se transmiten las fuerzas mecánicas (por ejemplo la fuerza del cirujano que tracciona el disparador, que se convierte en una fuerza de cierre en la grapa) , es importante que las tolerancias se supervisen cuidadosamente y, si es necesario, se ajusten en el ambiente de fabricación. Esto puede resultar caro, y aumenta el coste de fabricación del aplicador.
El diseño apropiado del aplicador y de sus componentes constitutivos puede mitigar algunos de los problemas asociados al mismo.
Otros diseños de aplicadores pueden requerir que el cirujano aplique una fuerza significativa al mecanismo disparador del aplicador para cerrar y bloquear la grapa quirúrgica correctamente, lo que puede hacer que el aplicador resulte difícil de manipular y operar.
Generalmente es necesario insertar el aplicador en una cánula durante la cirugía "de cerradura". Los aplicadores de grapa existentes tienen un mango "de empuñadura" que puede hacer que resulten difíciles de manipular en la posición correcta al mismo tiempo que se opera el aplicador (en particular para proporcionar la fuerza de cierre manual adecuada) para cerrar la grapa.
Es un objeto de la invención proporcionar un aplicador de grapas quirúrgicas que requiera menos fuerza para operarlo y para cerrar y asegurar correctamente una grapa quirúrgica que los aplicadores conocidos.
Otro objeto de la invención es proporcionar un aplicador que pueda cerrar y asegurar de manera precisa grapas quirúrgicas en una posición fiable.
Otro objeto más de la invención es proporcionar un aplicador que pueda manipularse de manera más precisa que los aplicadores conocidos, al mismo tiempo que se pueda operar para cerrar y asegurar una grapa quirúrgica de manera fiable.
Otro objeto adicional de la invención es proporcionar un aplicador de grapas quirúrgicas que tenga un diseño más sencillo y robusto que dichos aplicadores conocidos.
Otro objeto adicional más de la invención es proporcionar un aplicador de grapas quirúrgicas que sea más fácil y barato de fabricar que los aplicadores existentes.
Dicho aplicador puede ser parcial o totalmente desechable.
Sumario de la invención
De acuerdo con la invención se proporciona un aplicador de grapa quirúrgica operable manualmente, comprendiendo el aplicador un cilindro, teniendo el cilindro un primer extremo y un segundo extremo, estando formado el segundo extremo para acomodar una grapa quirúrgica; una palanca de compresión; un disparador y un mango; en el que el mango incluye una primera palanca que tiene un primer extremo y un segundo extremo; estando conectado el primer extremo de la primera palanca de manera pivotante al mango, estando conectado el segundo extremo de la primera palanca de manera deslizable al disparador; y una segunda palanca que tiene un primer extremo, un segundo extremo y una región central, estando conectada la región central de la segunda palanca de manera pivotante al mango, estando configurado el primer extremo de la segunda palanca para deslizarse por la longitud de la primera palanca, estando adaptado el segundo extremo de la segunda palanca para operar la palanca de compresión; estando configuradas la primera palanca y la segunda palanca para proporcionar una ventaja mecánica entre el disparador y la palanca de compresión, provocando el movimiento del disparador en el uso el movimiento de la palanca de compresión, dando como resultado el forzado de una grapa quirúrgica de una posición abierta a una posición cerrada, caracterizándose el aplicador de la grapa quirúrgica por que el mango incluye además una placa de colocación, estando asegurada la placa de colocación al cilindro por un perno de retención, estando asegurada además la placa de colocación al mango por una sujeción de la placa de colocación, estando adaptada la placa de colocación para limitar el movimiento del disparador en una posición que coincide con la posición cerrada.
El uso de un mecanismo para proporcionar una ventaja mecánica tal como la descrita anteriormente entre el disparador y la palanca de compresión permite reducir la fuerza de accionamiento manual que el usuario debe proporcionar, haciendo así que el aplicador resulte más fácil de operar.
El aumento simultáneo del recorrido del disparador permite que el cirujano determine de manera más precisa el grado de movimiento del disparador necesario para cerrar y asegurar la grapa quirúrgica correctamente.
Una disposición de palanca compuesta tal como la descrita anteriormente es un medio sencillo y efectivo de proporcionar una ventaja mecánica.
Al mismo tiempo, la función de la placa de colocación es colocar el cilindro de manera segura en relación con el mango. Esto permite que el cirujano manipule el aplicador de manera precisa.
Una función adicional de la placa de colocación es proporcionar un tope secundario positivo del disparador. Este tope secundario proporciona al cirujano una información clara y táctil de que el mecanismo ha alcanzado el final de su recorrido. Una vez que el mecanismo haya alcanzado el final de su recorrido, el tope secundario transmite las cargas aplicadas al disparador directamente al mango. Esto evita que el mecanismo se dañe debido a la aplicación de una fuerza excesiva al disparador.
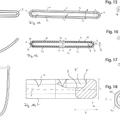
Preferentemente el cilindro incluye una ranura en su primer extremo, acomodando la ranura el segundo extremo de la segunda palanca.
La ranura del primer extremo del cilindro permite que la varilla de empuje se coloque completamente dentro del cilindro.
Preferentemente el primer extremo de la varilla de empuje incluye una tapa terminal, presionando el segundo extremo de la segunda palanca la tapa terminal.
La tapa terminal colocada en el primer extremo de la varilla de empuje proporciona una mayor superficie contra la que presiona el segundo extremo de la segunda palanca. Esto elimina la posibilidad de que el segundo extremo de la segunda palanca se desengrane del primer extremo de la varilla de empuje durante la operación del aplicador.
Preferentemente la varilla... [Seguir leyendo]
Reivindicaciones:
1. Un aplicador (10) de grapas quirúrgicas operable manualmente, comprendiendo el aplicador (10) :
un cilindro (12) , teniendo el cilindro (12) un primer extremo (14) y un segundo extremo (16) , estando formado el segundo extremo (16) para acomodar una grapa quirúrgica; una palanca (20) de apriete; un disparador (28) ; y un mango (62) ; en el que el mango (62) incluye: una primera palanca (72) que tiene un primer extremo (74) y un segundo extremo (76) , estando conectado el primer extremo (74) de la primera palanca (72) de manera pivotante en el mango (62) , estando conectado el segundo extremo (76) de la primera palanca (72) de manera deslizable al disparador (28) ; y una segunda palanca (88) que tiene un primer extremo (90) , un segundo extremo (92) y una región central (94) , estando conectada la región central (94) de la segunda palanca (88) de manera pivotante al mango (62) , estando configurado el primer extremo (90) de la segunda palanca (88) para deslizarse a lo largo de la longitud de la primera palanca (72) , estando adaptado el segundo extremo (92) de la segunda palanca (88) para operar la palanca (20) de apriete; estando configuradas la primera palanca (72) y la segunda palanca (88) para proporcionar una ventaja mecánica entre el disparador (28) y la palanca (20) de apriete, provocando el movimiento del disparador (28) durante su uso el movimiento de la palanca (20) de apriete, dando como resultado el forzado de una grapa quirúrgica de una posición abierta a una posición cerrada; estando el aplicador (10) de grapas quirúrgicas caracterizado por que el mango (62) incluye además una placa (110) de colocación, estando asegurada la placa (110) de colocación al cilindro (12) por un perno (114) de retención, estando asegurada además la placa (110) de colocación al mango (62) por una sujeción (112) de la placa de colocación, estando adaptada la placa de colocación para limitar el movimiento del disparador en una posición que coincide con la posición cerrada.
2. Un aplicador (10) de acuerdo con la reivindicación 1, en el que el cilindro (12) incluye una ranura en su primer extremo (14) , acomodando la ranura el segundo extremo (16) de la segunda palanca (88) .
3. Un aplicador (10) de acuerdo con la reivindicación 1, en el que el disparador incluye un indicador (32) visual en al menos un lado del mismo, proporcionando el indicador (32) visual medios indicativos de una posición intermedia del disparador.
4. Un aplicador (10) de acuerdo con la reivindicación 3, en el que el cilindro (12) está colocado en el mango (62) por medio de un perno (122) del cilindro, estando asegurado el perno del cilindro al mango (62) .
5. Un aplicador (10) de acuerdo con una cualquiera de las reivindicaciones anteriores, en el que al menos uno de entre el disparador (28) , el mango (62) , la primera palanca (72) , la segunda palanca (88) o la placa (110) de colocación está formado de un material que se funde cuando se expone el aplicador al ambiente operativo dentro de una autoclave médica.
Patentes similares o relacionadas:
Pieza de boca para un instrumento quirúrgico de vástago tubular, del 13 de Mayo de 2020, de AESCULAP AG: Pieza de boca para un instrumento quirúrgico de vástago tubular con un componente de sujeción , una primera rama con una primera zona de actuación […]
Instrumento médico de vástago con una placa de apoyo / puente en el riel de retención, del 6 de Mayo de 2020, de AESCULAP AG: Instrumento médico de vástago , con una cabeza de instrumento que presenta una pieza de boca con dos ramas de pieza de boca que pueden moverse a […]
Dispositivos para aplicar pinzas quirúrgicas, del 27 de Noviembre de 2019, de Endodynamix, Inc: Un aparato de aplicación de pinzas quirúrgicas, que comprende: una carcasa ; un mecanismo impulsor que incluye una estructura de soporte […]
Dispositivo de pinzado de tejidos, del 30 de Octubre de 2019, de BOSTON SCIENTIFIC SCIMED, INC.: Un dispositivo de pinzado de tejidos, que comprende: un miembro flexible dimensionado para inserción a través de un canal […]
Instrumento médico de tipo vástago con diferentes distancias de posición de almacenamiento mediante elementos de arrastre de grapas y pestañas de retención para grapas, del 2 de Octubre de 2019, de AESCULAP AG: Instrumento médico de tipo vástago con un cabezal de instrumento para aplicar grapas , en el que el cabezal de instrumento puede unirse por medio de un vástago […]
 Clip quirúrgico, del 25 de Septiembre de 2019, de AESCULAP AG: Clip quirúrgico para un aplicador de clips quirúrgico con al menos una pareja de brazos de clip (2a, 2b, 2c, 2d), donde cada brazo de clip (2a, 2b, […]
Clip quirúrgico, del 25 de Septiembre de 2019, de AESCULAP AG: Clip quirúrgico para un aplicador de clips quirúrgico con al menos una pareja de brazos de clip (2a, 2b, 2c, 2d), donde cada brazo de clip (2a, 2b, […]
Dispositivo de pinzado de tejidos, del 18 de Septiembre de 2019, de BOSTON SCIENTIFIC SCIMED, INC.: Un aparato de pinzado de tejido que comprende: una pinza ; una cápsula , en la que un extremo proximal de la pinza se recibe dentro de la […]
Dispositivo de plicatura con elemento de fijación lineal conformable para su uso en el tratamiento de anuloplastia de plicatura directa de la regurgitación de la válvula mitral, del 17 de Abril de 2019, de Cardinal Health Switzerland 515 GmbH: Un sistema para el tratamiento de la regurgitación de la válvula mitral a través de la anuloplastia de plicatura directa de un paciente que comprende: un dispositivo de plicatura […]