Dispositivo para el apilado en varias capas de una base.
Dispositivo para el apilado automático de piezas de embalaje sobre una base en una disposición espacial predeterminada para configurar una pila con
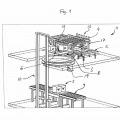
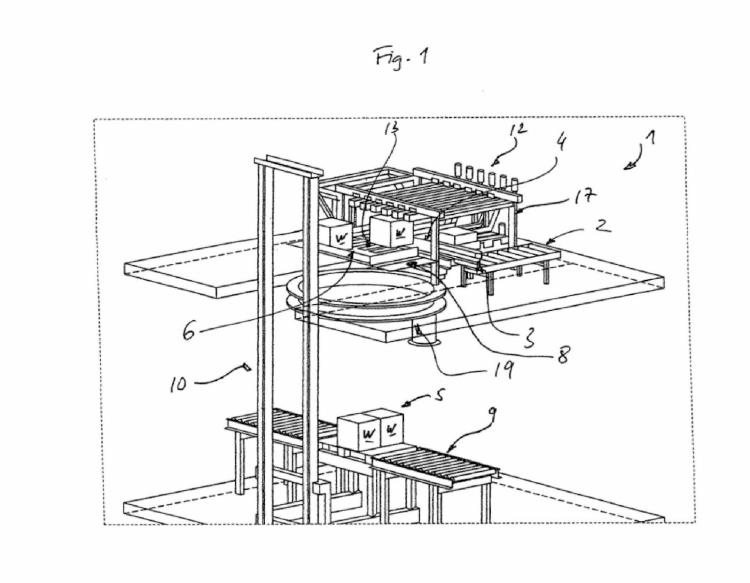
- al menos un transportador de alimentación que facilita las piezas de embalaje (W) individuales en un orden predeterminado;
- con una unidad de elevación y descenso para elevar y descender una base (P, 8) dispuesto en un lugar de apilado (6) en la dirección Y;
- con medios de desplazamiento adyacentes a un extremo de entrega del transportador de alimentación que transfieren las piezas de embalaje (W) desde el transportador de alimentación (2) y las transportan a la posición predeterminada en la pila (S);
comprendiendo los medios de desplazamiento:
- un transportador de posicionamiento (4) adyacente al extremo de entrega del transportador de alimentación que está dispuesto en horizontal y a lo largo hacia un lado del lugar de apilado (6) para posicionar las piezas de embalaje (W) en la dirección X,
- al menos una placa corredera (13) y un empujador (14) para transportar las piezas de embalaje (W) desde el transportador de posicionamiento en la dirección Z a la posición predeterminada en la pila (S),
estando configurada la al menos una placa corredera como placa en forma de tiras plana configurada en horizontal y a lo largo del lado del lugar de apilado (6) y desplazable transversalmente al mismo para transferir las piezas de embalaje (W) en el empuje de las piezas de embalaje (W) mediante el empujador desde el transportador de posicionamiento a la posición de dirección X ,y depositarlas en la dirección Z sobre la base (P, 8, 45) o en la pila (S), caracterizado por que el empujador está configurado como disposición de una pluralidad de empujadores adicionales (14) dispuestos en horizontal y a lo largo del lado del lugar de apilado (6) que realizan el empuje de las piezas de embalaje (W) desde el transportador de posicionamiento en la dirección a la pila (S), pudiendo desplazarse los empujadores individuales en cada caso independientemente de la al menos un placa corredera (13) en la dirección Z para retener la pieza de embalaje (W) al retraer la placa corredera (13).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2013/063344.
Solicitante: Dematic GmbH.
Nacionalidad solicitante: Alemania.
Dirección: Carl-Legien-Strasse 15 63073 Offenbach ALEMANIA.
Inventor/es: CAVELIUS,JÖRG.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G57/03 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 57/00 Apilado de objetos (B65G 60/00 tiene prioridad; alimentación, apilado de hojas B65H). › encima.
- B65G57/24 B65G 57/00 […] › siendo las capas transferidas como un conjunto, p. ej. sobre pallets.
PDF original: ES-2550990_T3.pdf
Fragmento de la descripción:
Dispositivo para el apilado en varias capas de una base
La invención se refiere a un dispositivo para el apilado automático de piezas de embalaje sobre una base en una disposición espacial predeterminada para configurar una pila de acuerdo con la reivindicación 1.
El apilado automático de una base o de un soporte, especialmente de un palé o de un carro con ruedas, con piezas de embalaje para configurar una pila para el envío posterior, por tanto el "paletizado" es conocido en sí mismo. En 10 este caso, sin embargo, las piezas de embalaje se depositan con tamaño o bien dimensión uniformes mediante robots, pinzas, etc. en lugares determinados matemáticamente.
En el proceso de carga automática de un soporte de carga con piezas de embalaje de diferente acuñación para configurar una pila se trata, por el contrario, del denominado paletizado automático "mixed case" (caso mixto) .
En la logística de distribución actual se imponen requisitos cada vez mayores en la expedición. Por lo tanto, es necesario desarrollar sistemas de expedición que ejecuten automáticamente encargos sin acción manual.
Miles de productos diferentes (o bien piezas de embalaje) de diferente acuñación (tamaño, forma, peso, 20 dimensiones, superficies, resistencia, etc.) deben expeditarse automáticamente con tales sistemas.
En este caso deben considerarse diferentes aspectos que aumentan enormemente la complejidad con respecto al apilado manual "sencillo" de geometrías sencillas regulares. Así una pieza de embalaje subsiguiente solamente puede apilarse o depositarse bien sobre una pieza de embalaje anterior si esta presenta una superficie lisa o plana que debería además estar orientada aproximadamente en horizontal, y si la pieza de embalaje puede soportar sin daños el peso de las piezas de embalaje posteriores depositadas sobre la misma.
Además la pila formada debería presentar una cierta estabilidad, entre otros, para que en el transporte no se caiga. Aunque ayude la envoltura con lámina de plástico no puede estabilizar por sí sola una pila formada de manera 30 defectuosa.
Además se desea en el lado del comprador cada vez con más frecuencia una optimización de la pila a causa del orden de descarga deseado.
El apilado de diferentes piezas de embalaje o bien de mercancías de diferente tamaño o dimensión se realiza por tanto la mayoría de las veces manualmente, dado que las exigencias en la estabilidad de la pila, la densidad de embalaje dentro de la pila, y el orden de la carga, así como el orden de descarga condicionado a este respecto y sin olvidar la capacidad de apilado de las mercancías son extremadamente altas y hasta ahora tampoco han sido satisfechas ni siquiera parcialmente por los procedimientos y dispositivos conocidos.
Por el documento EP 1 462 394 B1 se conoce un dispositivo para la carga automática de un soporte de carga con unidades de embalaje que forman una pila de carga que forma, es decir un dispositivo para paletizar. En el caso del dispositivo las unidades de embalaje se alimentan almacenadas a estantes y de manera individual y desde estos se depositan en una mesa de embalaje. Allí la unidad de embalaje se desplaza de manera horizontal sobre la mesa por 45 un empujador a lo largo del lado ancho del palé que va a cargarse hasta que se alcanzan las coordenadas de carga en la dirección X. A continuación un empujador adicional y una lengüeta de carga empujan simultáneamente la unidad de embalaje en la dirección de la profundidad de carga sobre el palé hasta que se alcanzan las coordenadas de carga en la dirección Z. A continuación la lengüeta de carga retrocede, deteniéndose el empujador y sirviendo de separador de manera que la unidad de embalaje se deposita sobre el palé en el lugar deseado "cayendo 50 libremente". En este caso la pila que se forma por una ayuda de carga se apoya en los tres lados restantes. Por tanto se apila casi "contra la pared". El desplazamiento sobre la mesa de embalaje requiere mucho tiempo y debido a la accesibilidad limitada tiene inconvenientes en la formación del patrón de embalaje. Además es obligatorio que las lengüetas de carga y el separador/empujador se desplacen simultáneamente en la dirección X. También puede "ejecutarse" solamente una unidad de embalaje secuencialmente.
Por el documento WO 2010/059923 A1 se conoce un dispositivo automático asistido por robot para apilar en el que una placa intermedia se emplea para la configuración de la primera capa de una pila y cambio de palé simultáneo.
A este respecto el objetivo de la presente invención consiste en facilitar un dispositivo para el apilado automático de 60 piezas de embalaje sobre un soporte en una disposición espacial predeterminada para configurar una pila que, de manera flexible, permita un apilamiento mixed-case con alto caudal.
Este objetivo se resuelve mediante el dispositivo reproducido en la reivindicación 1. De las reivindicaciones dependientes y de la descripción resultan configuraciones ventajosas. 65
Si no se emplea un empujador individual como en el estado de la técnica. sino que el empujador está configurado como disposición de una pluralidad de empujadores individuales dispuestos en horizontal y a lo largo del lateral del lugar de apilado, es decir está configurado como batería, que realizan el empuje de las piezas de embalaje desde el transportador de posicionamiento en la dirección hacia la pila, pudiendo desplazarse los empujadores individuales independientemente de la al menos una placa corredera en la dirección Z, para retener la pieza de embalaje al retraer la placa corredera, las piezas de embalaje puede posicionarse de manera más variable y además varias piezas de embalaje pueden apilarse con menos desfase temporal o incluso simultáneamente.
En una variante especialmente preferida no todos los empujadores individuales presentan un accionamiento propio sino que tienen al menos un accionamiento, preferiblemente dos accionamientos comunes que selectivamente pueden acoplarse con un determinado empujador individual a su accionamiento. Para ello el accionamiento puede ser desplazable y llegar a través de un elemento de acoplamiento a engancharse con un carro de accionamiento del o de los empujadores individuales respectivos (adyacentes) .
Los empujadores individuales están por tanto suspendidos en un bastidor en el que pueden moverse en la dirección z acercándose (o alejándose) sobre la pila. Para ello se ponen en marcha mediante un carro o travesaño dispuesto por encima que discurre en perpendicular, es decir en la dirección X, que soporta el accionamiento, produciendo un elemento de acoplamiento o de arrastrador en este caso la unión activa entre accionamiento y empujador individual. El elemento de arrastrador se suspende en este caso en forma de hoja o de tiras del accionamiento o bien de su travesaño de desplazamiento hacia abajo y se engancha en una ranura abierta hacia arriba en el carro de accionamiento del o de los empujadores individuales adyacentes para lo que el arrastrador presenta una anchura correspondiente.
Preferiblemente están previstos dos accionamientos colectivos desplazables de este tipo, uno por cada lado que vienen, o bien están posicionados, en la dirección X del bastidor o bien aguas arriba y aguas abajo en la dirección X respecto al lugar de apilado.
La disposición de los empujadores individuales puede extenderse por toda la longitud del transportador de posicionamiento, entonces los empujadores individuales pueden configurarse de manera inmóvil en la dirección X o bien la dirección de transporte del trasportador de posicionamiento. Alternativamente también es concebible prever de manera correspondiente menos empujadores individuales, pero al menos dos, y configurarlos entonces de manera regulable para compensar en la dirección X.
En una forma de realización preferida la al menos una placa corredera está configurada como placa en forma de tiras plana configurada de manera que puede moverse en horizontal y a lo largo del lateral del lugar de apilado y transversalmente a éste, que discurre más delgada en la dirección del lugar de apilado. La placa corredera está suspendida sobre el lado del transportador de posicionamiento enfrentado al soporte. Allí está fijada dado el caso en el mismo bastidor que el empujador individual. Si existe más de una placa corredera pueden disponerse en paralelo y unas junto a otras.
Se prefiere si la al menos una placa corredera puede moverse adelante y atrás en cada caso sobre un eje lineal orientado en la dirección Z a modo de carro. Por tanto de manera sencilla puede dirigirse o retroceder en la dirección Z necesaria hacia la pila y a pesar de ello es lo suficientemente rígida a través... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo para el apilado automático de piezas de embalaje sobre una base en una disposición espacial predeterminada para configurar una pila con -al menos un transportador de alimentación que facilita las piezas de embalaje (W) individuales en un orden predeterminado; -con una unidad de elevación y descenso para elevar y descender una base (P, 8) dispuesto en un lugar de apilado (6) en la dirección Y;
-con medios de desplazamiento adyacentes a un extremo de entrega del transportador de alimentación que transfieren las piezas de embalaje (W) desde el transportador de alimentación (2) y las transportan a la posición predeterminada en la pila (S) ; comprendiendo los medios de desplazamiento:
-un transportador de posicionamiento (4) adyacente al extremo de entrega del transportador de alimentación que está dispuesto en horizontal y a lo largo hacia un lado del lugar de apilado (6) para posicionar las piezas de embalaje (W) en la dirección X, -al menos una placa corredera (13) y un empujador (14) para transportar las piezas de embalaje (W) desde el transportador de posicionamiento en la dirección Z a la posición predeterminada en la pila (S) , estando configurada la al menos una placa corredera como placa en forma de tiras plana configurada en horizontal y a lo largo del lado del lugar de apilado (6) y desplazable transversalmente al mismo para transferir las piezas de embalaje (W) en el empuje de las piezas de embalaje (W) mediante el empujador desde el transportador de posicionamiento a la posición de dirección X , y depositarlas en la dirección Z sobre la base (P, 8, 45) o en la pila (S) , caracterizado por que el empujador está configurado como disposición de una pluralidad de empujadores adicionales (14) dispuestos en horizontal y a lo largo del lado del lugar de apilado (6) que realizan el empuje de las piezas de embalaje (W) desde el transportador de posicionamiento en la dirección a la pila (S) , pudiendo desplazarse los empujadores individuales en cada caso independientemente de la al menos un placa corredera (13) en la dirección Z para retener la pieza de embalaje (W) al retraer la placa corredera (13) .
2. Dispositivo de acuerdo con la reivindicación 1, caracterizado por que los empujadores individuales (14) tienen al menos uno, preferiblemente dos accionamientos (21, 22) comunes que pueden acoplarse selectivamente con un determinado empujador individual (14) para su accionamiento.
5. Dispositivo de acuerdo con una de las reivindicaciones anteriores, caracterizado por que la al menos una, 45 preferiblemente dos placas correderas (13) puede, o bien pueden, moverse en horizontal y a lo largo hacia un lado del lugar de apilado (6) . 6. Dispositivo de acuerdo con una de las reivindicaciones anteriores, caracterizado por que la disposición de los empujadores individuales está fijada en un bastidor (17) sujeto por encima del transportador de posicionamiento. 50 7. Dispositivo de acuerdo con la reivindicación 6, caracterizado por que las placas correderas se apoyan asimismo en el bastidor (17) . 8. Dispositivo de acuerdo con la reivindicación 6 o 7, caracterizado por que el transportador de posicionamiento (4) 55 está fijado en el bastidor (17) . 9. Dispositivo de acuerdo con una de las reivindicacione. 6. 8, caracterizado por que el bastidor (17) está configurado de manera desplazable. 10. Dispositivo de acuerdo con una de las reivindicaciones anteriores, caracterizado por que los empujadores individuales (14) pueden desplazarse independientemente unos de otros. 3. Dispositivo de acuerdo con la reivindicación 2, caracterizado por que el dispositivo comprende un travesaño (21T, 22T) desplazable para el accionamiento (21, 22) que presenta un arrastrador (26) que sobresale hacia abajo en la dirección de los empujadores individuales que se engancha para el acoplamiento en una ranura (27) abierta hacia arriba de los empujadores individuales.
4. Dispositivo de acuerdo con una de las reivindicaciones anteriores, caracterizado por que la al menos una placa corredera (13) puede moverse en cada caso adelante y atrás sobre un eje lineal orientado en la dirección Z a modo de carro.
Patentes similares o relacionadas:
MÁQUINA PALETIZADORA DE ENVASES Y PROCEDIMIENTO DE UTILIZACIÓN DE LA MISMA, del 30 de Abril de 2020, de AND & OR RESEARCH, S.L.U: Máquina paletizadora de envases y su procedimiento de utilización para conseguir la máxima compactación de los envases en bateas. La máquina comprende un bastidor, en […]
Dispositivo y procedimiento para el paletizado de pilas, del 4 de Marzo de 2020, de WINDMOLLER & HOLSCHER KG: Dispositivo para el paletizado de pilas , en particular de sacos, productos semielaborados de sacos, secciones de tubos flexibles o sacos aplanados, que comprende las […]
Aparato mejorado para paletizar automáticamente recipientes y método respectivo, del 12 de Febrero de 2020, de UNITEC S.P.A: Aparato para cargar una pluralidad de recipientes , particularmente que contienen productos vegetales, sobre palés, que comprende: - un primer conjunto que consiste […]
Dispositivo de detección y método para un dispositivo de transferencia de capa, del 20 de Noviembre de 2019, de Gebo Packaging Solutions Italy SRL: Un método de transferencia para utilizar un dispositivo de transferencia que funciona como dispositivo de desmontaje de palé, a fin de transferir capas preformadas […]
Procedimiento para producir pilas de hojas, del 5 de Junio de 2019, de BW Papersystems Stuttgart GmbH: Procedimiento para producir pilas de hojas en el que está previsto que para salvar una separación vertical entre el nivel de suministro de las hojas […]
Dispositivo de transferencia de capas preconformadas de objetos a la parte superior de una paleta, del 5 de Junio de 2019, de Gebo Packaging Solutions Italy SRL: Dispositivo de transferencia de capas preconformadas de objetos a la parte superior de una paleta estandarizada, que comprende: - una columna de guiado […]
Dispositivo de carga, del 5 de Junio de 2019, de BEUMER Group GmbH & Co. KG: Dispositivo de carga para cargar elementos de carga fraccionada por capas en una superficie de carga , con un cabezal de carga que puede desplazarse al menos […]
Dispositivo de alimentación para alimentar con sacos llenos un dispositivo de paletización, del 17 de Abril de 2019, de WINDMOLLER & HOLSCHER KG: Dispositivo de paletización para una pila de sacos llenos para formar una pila de sacos, que presenta un dispositivo de elevación , así como un dispositivo […]