Procedimiento de ajuste del lazo de velocidad de un variador de velocidad.
Procedimiento de ajuste de un lazo de regulación de velocidad de un variador de velocidad que está destinado a controlar un motor (M) conectado a una carga de elevación que comprende una cabina de ascensor,
caracterizado porque el procedimiento comprende una etapa de cálculo de una ganancia (KP) proporcional y de una ganancia (KI) integral del lazo de regulación de velocidad, en función de la velocidad (Vnom) nominal lineal de la carga, de la frecuencia (Fnom) nominal de rotación del motor, del número de pares de polos (PN) del motor y de la masa (Mtot) total de la carga, siendo la masa (Mtot) total un parámetro predeterminado no medido por un sensor.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/056835.
Solicitante: SCHNEIDER TOSHIBA INVERTER EUROPE SAS.
Nacionalidad solicitante: Francia.
Dirección: 33, RUE ANDRE BLANCHET 27120 PACY SUR EURE FRANCIA.
Inventor/es: MALRAIT,FRANÇOIS, CAPITANEANU,STÉFAN, BASIC,DURO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66B1/30 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66B ASCENSORES; ESCALERAS O PASILLOS MECANICOS (dispositivos salvavidas utilizados como alternativa a los medios de salida normales, p. ej. escaleras, durante el rescate, para hacer descender a las personas de los edificios u otras estructuras análogas, en jaulas, bolsas, o soportes similares A62B 1/02; equipamiento para la manipulación de cargars o para facilitar el embarque de pasajeros o similar B64D 9/00; dispositivos de frenado o de parada caracterizados por su aplicación a los mecanismos de elevación o izado B66D 5/00). › B66B 1/00 Sistemas de control de ascensores en general (dispositivos de seguridad B66B 5/00; control del funcionamiento de la puerta o barrera B66B 13/00). › que actúan sobre los órganos de accionamiento.
- H02P21/00 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › Disposiciones o métodos de control de máquinas eléctricas mediante control por vector, p. ej., por control de la orientación del campo.
PDF original: ES-2550948_T3.pdf
Fragmento de la descripción:
Procedimiento de ajuste del lazo de velocidad de un variador de velocidad La presente invención se refiere a un procedimiento de ajuste de un lazo de regulación de velocidad de un variador de velocidad, controlando el variador de velocidad un motor eléctrico síncrono o asíncrono destinado a arrastrar una carga de elevación, en particular una cabina de ascensor.
Para controlar un motor eléctrico, un variador de velocidad consta habitualmente de un sistema de control que presenta un lazo de regulación de la velocidad del motor y un lazo de regulación de la corriente enviada en las diferentes fases del motor. En una aplicación de elevación, en particular en un ascensor, es especialmente importante ajustar bien los parámetros de los lazos de regulación de corriente y de regulación de velocidad del variador de velocidad que controla el motor de elevación de la cabina. En efecto, el correcto ajuste de estos lazos de regulación influye directamente, por una parte, en los rendimientos globales del ascensor y, por otra parte, en las sensaciones de confort y de seguridad que perciben los usuarios del ascensor. Sin embargo, esta regulación se muestra a veces larga y/o complicada de implementar en el momento de la puesta en servicio del variador de velocidad.
El documento US 5 929 400 describe ya un procedimiento que permite una puesta en servicio automática de un variador de velocidad en una aplicación de elevación. Sin embargo, este método consta de una fase de precalibrado antes del arranque durante la cual es en particular necesario inyectar corriente en el motor manteniendo el rotor bloqueado.
El documento JP 08 012206 muestra un dispositivo que permite ajustar el lazo de regulación de velocidad de un ascensor. Este dispositivo necesita sin embargo la utilización de un sensor de carga que permita determinar la masa real de la cabina de ascensor, de tal modo que se ajuste automáticamente la ganancia proporcional del lazo de regulación de velocidad.
La invención tiene, por lo tanto, como objetivo facilitar y simplificar la puesta en servicio de un variador de velocidad que controla un motor de elevación, ofreciendo una estimación de la ganancia proporcional y de la ganancia integral del lazo de regulación de velocidad. Estas ganancias se calculan basándose únicamente en un reducido número de parámetros de usuario que hay que introducir, sin necesitar unas etapas de inyección de corriente, lo que permite tener simplemente un ajuste previo del lazo de regulación de velocidad. De manera ventajosa, este ajuste se hace off-line, es decir que las ganancias se calculan una única vez a partir de unos parámetros introducidos, y ya no necesita ajuste de las ganancias en función de la masa real de la carga durante el funcionamiento del ascensor. El procedimiento es, por lo tanto, simple y económico, ya que no necesita sensor de carga.
Además, dichos parámetros que hay que introducir corresponden de manera ventajosa a unas magnitudes físicas conocidas de la aplicación. Como se pueden identificar fácilmente, estas magnitudes físicas las puede introducir por lo tanto muy fácilmente un usuario. La invención permite, por lo tanto, reducir el tiempo y el coste de la implementación de un variador de velocidad en una aplicación de elevación, por ejemplo de tipo ascensor.
Para ello, la invención describe un procedimiento de ajuste de un lazo de regulación de velocidad de un variador de velocidad que está destinado a controlar un motor conectado a una carga de elevación que consta de una cabina de ascensor. El procedimiento consta de una etapa de cálculo de una ganancia proporcional y de una ganancia integral del lazo de regulación de velocidad, en función de la velocidad nominal lineal de la cabina, de la frecuencia nominal de rotación del motor, del número de pares de polos del motor y de la masa total de la carga. La masa total es un parámetro predeterminado no medido por el sensor.
De acuerdo con una característica, la carga consta de una cabina de ascensor y la masa total de la carga es proporcional a la capacidad nominal de la cabina de ascensor, a la masa de la cabina de ascensor o a la masa de un contrapeso de la cabina de ascensor. De manera ventajosa, el procedimiento tiene, por lo tanto, en cuenta no solo la masa de la cabina de ascensor sino la masa total del conjunto del sistema.
De acuerdo con otra característica, el procedimiento consta también de una etapa de cálculo de una inercia del motor en función del par nominal del motor y del número de pares de polos del motor, para afinar el cálculo de la ganancia proporcional y de la ganancia integral del lazo de regulación de velocidad.
De acuerdo con otra característica, el procedimiento consta también de una etapa de cálculo de una constante de tiempo de filtrado de la medición de velocidad en función del par nominal del motor y de una información representativa de la resolución de un codificador de medición de velocidad del motor, para afinar el cálculo de la ganancia proporcional y de la ganancia integral del lazo de regulación de velocidad.
La invención también se refiere a un variador de velocidad que consta de un sistema de control que realiza un lazo de regulación de velocidad y destinado a controlar un motor conectado a una carga de elevación, constando el sistema de control del variador de velocidad de unos bloques de cálculo que implementan dicho procedimiento de ajuste.
Se van a mostrar otras características y ventajas en la descripción detallada que viene a continuación haciendo referencia a una forma de realización dada a título de ejemplo y representada en los dibujos adjuntos, en los que:
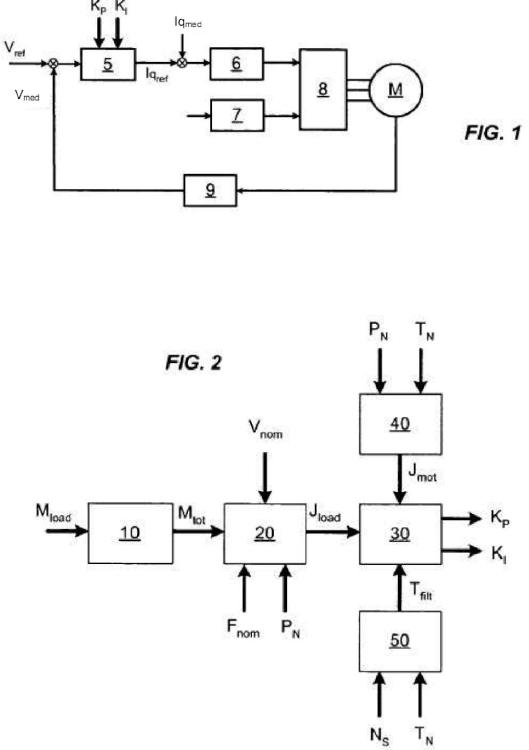
- la figura 1 representa una vista parcial de un sistema de control de un variador de velocidad que controla un motor; -la figura 2 muestra un cuadro sinóptico simplificado de acuerdo con la invención del cálculo de la ganancia KP
proporcional y de la ganancia KI integral del lazo de regulación de velocidad.
En referencia a la figura 1, un variador de velocidad consta de un sistema de control con el objetivo de controlar un motor M eléctrico. El motor M es un motor síncrono o asíncrono que está destinado a arrastrar una carga de tipo elevación, por ejemplo una aplicación de tipo ascensor. En este tipo de aplicación, la carga (no representada en las figuras) consta por tanto principalmente de una cabina de ascensor, de su contrapeso y de los cables asociados.
El sistema de control del variador consta de un regulador 5 de velocidad que realiza un lazo de regulación de velocidad. De forma conocida, el regulador 5 de velocidad recibe en la entrada una consigna procedente de una desviación entre una referencia Vref de velocidad de rotación del motor M y una medición Vmed de velocidad de rotación del motor M. El regulador 5 de velocidad utiliza una ganancia KP proporcional y una ganancia KI integral para realizar el lazo de regulación de velocidad. La salida del regulador 5 de velocidad proporciona una referencia Iqref de la corriente del par motor. La medición Mmed de velocidad la proporciona por ejemplo un módulo 9 de medición.
El sistema de control del variador realiza también un lazo de regulación de la corriente. Para ello, consta de un regulador 6 de corriente de par Iq y de un regulador 7 de corriente de flujo Id. El regulador 6 de corriente de par recibe en la entrada una consigna procedente de una desviación entre la referencia Iqref de la corriente de par y una medición Iqmed de la corriente de par. Las salidas de los reguladores 6 y 7 de corriente se trasforman a continuación en corrientes variables enviadas en cada fase del motor M por un módulo 8 de transformación.
La figura 2 presenta un cuadro sinóptico que muestra diferentes bloques de cálculo del sistema de control del variador de velocidad, lo que permite hacer una estimación de una ganancia KP proporcional y de una ganancia KI integral del lazo de regulación de velocidad, de acuerdo con la invención. Estas ganancias KP y KI las utiliza el regulador 5 de velocidad para realizar el lazo de regulación de velocidad.
Un primer bloque 10 de cálculo tiene como función determinar la masa Mtot total de la carga desplazada. Un segundo bloque 20 de cálculo tiene como función determinar la inercia Jload de la carga utilizando la masa Mtot total calculada en el primer bloque 10. Un tercer bloque 30 de cálculo tiene como función determinar KP y KI utilizando la inercia Jload de la carga calculada en el segundo bloque 20.
Opcionalmente, el tercer bloque 30 de cálculo puede utilizar un valor de la inercia Jmot del motor calculada en un cuarto bloque 40 de cálculo. Del mismo modo, el tercer bloque 30 de cálculo puede utilizar un valor de coeficiente... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de ajuste de un lazo de regulación de velocidad de un variador de velocidad que está destinado a controlar un motor (M) conectado a una carga de elevación que comprende una cabina de ascensor, caracterizado porque el procedimiento comprende una etapa de cálculo de una ganancia (KP) proporcional y de una ganancia (KI)
integral del lazo de regulación de velocidad, en función de la velocidad (Vnom) nominal lineal de la carga, de la frecuencia (Fnom) nominal de rotación del motor, del número de pares de polos (PN) del motor y de la masa (Mtot) total de la carga, siendo la masa (Mtot) total un parámetro predeterminado no medido por un sensor.
2. Procedimiento de ajuste de acuerdo con la reivindicación 1, caracterizado porque la masa (Mtot) total de la carga es proporcional a la capacidad nominal de la cabina de ascensor.
3. Procedimiento de ajuste de acuerdo con la reivindicación 1, caracterizado porque la masa (Mtot) total de la carga es proporcional a la masa de la cabina de ascensor.
4. Procedimiento de ajuste de acuerdo con la reivindicación 1, caracterizado porque la masa (Mtot) total de la carga es proporcional a la masa de un contrapeso de la cabina de ascensor.
5. Procedimiento de ajuste de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el
procedimiento comprende también una etapa de cálculo de una inercia (Jmot) del motor en función del par (TN) nominal del motor y del número de pares de polos (PN) del motor, para afinar el cálculo de la ganancia (KP) proporcional y de la ganancia (KI) integral del lazo de regulación de velocidad.
6. Procedimiento de ajuste de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el procedimiento comprende también una etapa de cálculo de un coeficiente de ancho de banda del lazo de regulación de velocidad en función del par (TN) nominal del motor y de la resolución (NS) de un codificador de medición de velocidad del motor, para afinar el cálculo de la ganancia (KP) proporcional y de la ganancia (KI) integral del lazo de regulación de velocidad.
7. Variador de velocidad que comprende un sistema de control que realiza un lazo de regulación de velocidad y destinado a controlar un motor conectado a una carga de elevación que comprende una cabina de ascensor, 25 caracterizado porque el sistema de control del variador de velocidad comprende unos bloques de cálculo (10, 20, 30, 40, 50) que implementan un procedimiento de ajuste del lazo de regulación de velocidad del variador de velocidad, comprendiendo el procedimiento de una etapa de cálculo de una ganancia (KP) proporcional y de una ganancia (KI) integral del lazo de regulación de velocidad, en función de la velocidad (Vnom) nominal lineal de la carga, de la frecuencia (Fnom) nominal de rotación del motor, del número de pares de polos (PN) del motor y de la masa (Mtot) total de la carga, siendo la masa (Mtot) total un parámetro predeterminado no medido por un sensor.
Patentes similares o relacionadas:
Dispositivo de control de un inversor, del 13 de Mayo de 2020, de LSIS Co., Ltd: Un dispositivo de control del inversor configurado para modificar un voltaje de referencia basado en vectores en un voltaje modificado basado en vectores y para suministrar […]
Método para controlar un inversor, del 6 de Mayo de 2020, de LSIS Co., Ltd: Un método para controlar un inversor que realiza una optimización de salida de un motor en una sección por encima de la velocidad […]
Aparato para estimar parámetros en un motor de inducción, del 6 de Mayo de 2020, de LSIS Co., Ltd: Un aparato para estimar un parámetro de un motor de inducción que incluye un controlador de corriente que emite tensiones de los ejes […]
Aparato de control de vectores sin sensor para motor de inducción, del 22 de Abril de 2020, de LSIS Co., Ltd: Un aparato de control de vectores sin sensor para controlar un motor de induccion, el aparato caracterizado por: un controlador de corriente que se configura […]
Aparato para estimar un parámetro en un motor de inducción, del 25 de Marzo de 2020, de LSIS Co., Ltd: Un aparato para estimar un parámetro de un motor de inducción que incluye un controlador de corriente que emite tensiones de los ejes d y q en un […]
Dispositivo de reducción de consumo de energía, del 26 de Febrero de 2020, de DAIKIN INDUSTRIES, LTD.: Dispositivo de reducción de consumo de energía que comprende: una parte de generación de energía; una parte de detección […]
Aparato para compensar un error de fase en un voltaje de salida del inversor, del 20 de Noviembre de 2019, de LSIS Co., Ltd: Un aparato de compensacion de fase en un voltaje de linea a linea en un sistema que incluye un inversor configurado para suministrar un voltaje a un motor , un controlador […]
DISPOSITIVO Y PROCEDIMIENTO DE DETERMINACIÓN DEL PAR, LA VELOCIDAD Y LAS PÉRDIDAS ENERGÉTICAS DE MOTORES ELÉCTRICOS ASÍNCRONOS TRIFÁSICOS, del 24 de Octubre de 2019, de UNIVERSITAT POLITECNICA DE VALENCIA: La invención describe un procedimiento y un dispositivo novedosos para la determinación del par, la velocidad y las pérdidas energéticas de motores eléctricos […]