Grapadora quirúrgica con articulación universal y sujeción previa de tejidos.
(15/05/2019) Una grapadora quirúrgica que comprende un conjunto de herramienta , en donde el conjunto de herramienta comprende:
un conjunto de canal para montar de manera mecánica un cartucho de grapas dentro del mismo;
un conjunto de cartucho de grapas montado de manera liberable mecánicamente en el conjunto de canal , el conjunto de cartucho de grapas que transporta una pluralidad de grapas ;
un conjunto de yunque dimensionado para deformar dicha pluralidad de grapas expulsadas desde dicho conjunto de cartucho de grapas contra el mismo durante el grapado;
un patín que se puede mover a través de dicho conjunto de cartucho…
Dispositivo de grapado quirúrgico para realizar una anastomosis circular y grapas quirúrgicas para su uso con el mismo.
(02/11/2016) Una grapadora quirúrgica, que comprende:
un conjunto de mango que incluye un mango estacionario, un mecanismo de aproximación y un gatillo de disparo para disparar una pluralidad de elementos de sujeción quirúrgicos; y
un efector de extremo soportado en un extremo distal del conjunto de mango, en el que el efector de extremo comprende:
un conjunto de yunque, que comprende:
una varilla central de yunque que tiene un extremo proximal configurado para la conexión selectiva al mecanismo de aproximación y un extremo distal, en el que la varilla central define un eje longitudinal central;
una cabeza (144a) de yunque asegurada al extremo distal de la varilla central de yunque, en el que la cabeza de yunque incluye una placa (144b) de yunque que define una superficie de contacto con el tejido y una pluralidad…
Instrumento quirúrgico motorizado.
(13/07/2016) Un instrumento quirúrgico motorizado que incluye:
un alojamiento ;
una parte endoscópica que se extiende distalmente desde el alojamiento y que define un primer eje longitudinal;
una parte de eje que se puede conectar selectivamente a un extremo distal de la parte endoscópica ; y
un efector de extremo que se puede conectar selectivamente a un extremo distal de la parte de eje y que define un segundo eje longitudinal que se extiende a través de él,
caracterizado por que al menos un componente electrónico se incluye en una parte del instrumento quirúrgico ;
donde el instrumento quirúrgico comprende una pluralidad de diferentes partes de eje y una pluralidad de diferentes efectores de extremo que se pueden conectar selectivamente al instrumento quirúrgico…
Instrumento quirúrgico motorizado.
(16/09/2015) Un instrumento quirúrgico para la colocación de grapas, que incluye:
un conjunto de empuñadura ;
una primera parte endoscópica (2020a) y
un primer efector de extremo (2030a),
caracterizado por que el instrumento quirúrgico para la colocación de grapas, comprende:
una pluralidad de partes endoscópicas de diferentes tipos incluyendo la primera parte endoscópica (2020a) y una pluralidad de efectores de extremo de diferentes tipos incluyendo el primer efector de extremo (2030a) los efectores de extremo se pueden conectar cada uno selectivamente a una parte distal de una parte endoscópica y
en el que cada una de las partes endoscópicas (2020a, 2020b) incluye un miembro de accionamiento configurado para engranar una parte de un efector de extremo y…
Instrumento quirúrgico motorizado.
(26/08/2015) Un instrumento quirúrgico para la colocación de grapas, que comprende:
un conjunto de empuñadura ;
una primera parte endoscópica (2020a) que se puede conectar selectivamente a una parte distal del conjunto de empuñadura y que define un eje geométrico longitudinal, cuya primera parte endoscópica (2020a) incluye un miembro de accionamiento;
una segunda parte endoscópica (2020b) que se puede conectar selectivamente a la parte distal del conjunto de empuñadura , incluyendo la segunda parte endoscópica (2020b) un elemento de accionamiento;
un primer efector de extremo (2030a) que se puede conectar selectivamente a una…
Dispositivo de grapado quirúrgico.
(17/09/2014) Un dispositivo quirúrgico que comprende:
una porción de asa que incluye un cuerpo que define un asa fija , un gatillo móvil , un vástago apoyado dentro del cuerpo y un conjunto de cilindro posicionado de forma tal que pueda desplazarse alrededor del vástago, definiendo el vástago una primera guía de desplazamiento para recibir un primer bastidor de forma tal que pueda desplazarse, estando el primer bastidor funcionalmente conectado con un miembro de accionamiento del dispositivo quirúrgico, incluyendo el conjunto de cilindro un primer seguro que es capaz de moverse selectivamente desde una primera…
Conjunto de instrumento para un dispositivo de grapado quirúrgico.
(23/07/2013) Un dispositivo de grapado quirúrgico , que comprende:
un yunque ;
un conjunto de cartucho , teniendo el conjunto de cartucho una pluralidad de elementos de sujeción y estando montado para moverse de modo pivotable desde una posición abierta hasta una posición apretada;
un miembro de apriete , que es desplazable desde una posición retraída hasta una posición avanzada, para desplazar el conjunto de cartucho con relación al yunque desde la posición separada hasta la posición apretada y para impedir que el espacio entre las partes proximales del yunque y del conjunto de cartucho exceda una distancia predeterminada;
un miembro de apriete dinámico situado de modo que pueda moverse con relación al yunque y al conjunto de cartucho , siendo desplazable…
Grapa cargada direccionalmente.
(09/04/2013) Un cartucho con grapas quirúrgicas cargadas direccionalmente en el mismo, las grapas paraser expulsadas desde el cartucho a cavidades formadas en un yunque, de manera que las cavidades deforman lasgrapas en una configuración sustancialmente en forma de B, en el que el yunque y el cartucho están destinados acomprimir tejido entre ellos cuando el yunque y el cartucho son colocados en una posición aproximada,comprendiendo cada grapa quirúrgica :
un puente posterior ;
un par de patas deformables que se extienden hacia abajo desde el puente posterior, estando destinadaslas patas a ponerse en contacto con las cavidades de yunque para la formación…
Conjunto de herramienta para un dispositivo de grapado quirúrgico.
(19/03/2013) Conjunto de herramienta para su uso con una grapadora quirúrgica, comprendiendo el conjunto deherramienta:
un yunque ;
un conjunto de cartucho que tiene al menos una grapa y una pluralidad de ranuras de retención, pudiendomoverse el conjunto de cartucho con respecto al yunque entre posiciones separada y aproximada, incluyendoademás el conjunto de cartucho un patín y al menos un elemento empujador asociado con cada al menos una grapa;
un elemento de sujeción situado adyacente a un extremo proximal del conjunto de herramienta, pudiendo moverseel elemento de sujeción desde una posición retraída hasta una posición avanzada para mover el yunque y el conjuntode cartucho a la posición aproximada;
un…
Grapadora quirúrgica con articulación universal y sujeción previa de tejidos.
(06/06/2012) Una grapadora quirúrgica, que comprende:
un conjunto de herramienta que incluye un conjunto de cartucho que tiene una pluralidad de grapas y un conjunto de yunque , el conjunto de yunque y el conjunto de cartucho que tienen una posición abierta y una posición aproximada;
un patín de arrastre en el conjunto de cartucho; y
al menos una banda (700a, 700b, 700c) que se extiende distalmente hacia el conjunto de cartucho; caracterizada porque el conjunto de cartucho tiene un par de pasadores (600a, 600b); y al menos una banda se extiende alrededor del par de pasadores y pasa proximalmente hacia el patín de arrastre, de manera que una fuerza proximal en la al menos una banda avanza el patín de arrastre distalmente para expulsar y formar las grapas contra…
Dispositivo de grapado quirúrgico.
(23/05/2012) Un dispositivo de grapado quirúrgico , que comprende:
una parte de mango , que incluye un disparador
una parte de cuerpo que se extiende distalmente desde la parte de mango;
una parte de cabeza que incluye un yunque y un cartucho que contiene una serie ordenada de grapas , siendo el yunque y el cartucho movibles entre sí, desde una posición abierta a una posición cerrada, en donde el yunque y el cartucho están en alineación cooperativa de cierre;
un mecanismo de aproximación conectado operativamente a la parte de cabeza y pudiendo ser accionada para mover el yunque y el cartucho entre las posiciones abierta y cerrada; estando el disparador operativamente asociado con el mecanismo de aproximación de manera…
Conjunto de instrumento para un dispositivo de grapado quirúrgico.
(08/05/2012) Un dispositivo de grapado quirúrgico , que comprende:
un conjunto de mango;
una porción de un cuerpo endoscópico; y
un conjunto de instrumento , que incluye:
un yunque ;
un conjunto de cartucho de grapas que incluye un cartucho que tiene una pluralidad de grapas quirúrgicas, pudiendo el yunque y el cartucho moverse el uno respecto al otro entre una posición abierta y una posición de pinzado; y
un miembro de pinzamiento dinámico , teniendo dicho miembro de pinzamiento dinámico una pestaña superior (36a) para acoplarse con el yunque y una pestaña inferior (36b) para acoplarse con el conjunto de cartucho;
un aro de pinzado que se puede mover con el miembro de pinzamiento dinámico desde una posición retraída en el extremo proximal del yunque hasta…
Grapadora quirúrgica con articulación universal y sujección previa de tejidos.
(24/04/2012) Una grapadora quirúrgica, que comprende:
un conjunto de herramienta que incluye un conjunto de cartucho que tiene una pluralidad de grapas y un conjunto de yunque , el conjunto de yunque y el conjunto de cartucho que tienen una posición abierta y una posición aproximada;
un miembro de sujeción dinámico que tiene una superficie de leva superior que engancha el conjunto de yunque y una superficie de leva inferior que engancha el conjunto de cartucho, en el que las superficies de leva superior e inferior se configuran para oponerse a las fuerzas expansivas asociadas con la sujeción y grapado del tejido y mantener un hueco considerablemente uniforme entre el conjunto de yunque y el conjunto de cartucho durante el grapado;
un patín de arrastre trasladable…
Dispositivo de grapado quirúrgico.
(11/04/2012) Un dispositivo quirúrgico que comprende:
una porción de asa 12 que tiene un asa fija y un gatillo móvil ;
una porción de cuerpo central que define un primer eje longitudinal y que se extiende distalmentedesde la porción de asa, incluyendo la porción de cuerpo central una conexión de operación conectadade manera maniobrable al gatillo móvil; y
un cargador desechable sujeto de forma tal que pueda desprenderse al extremo distal de la porción decuerpo central, incluyendo el cargador desechable un conjunto de herramienta que tiene un miembroimpulsor móvil para llevar a cabo la operación del conjunto de herramienta, una conexión no rígida , y una conexión sustancialmente rígida , interconectando la conexión no rígida la conexiónsustancialmente rígida al miembro impulsor…
Grapadora quirúrgica con articulación universal y sujeción previa del tejido.
(04/04/2012) Una grapadora quirúrgica, que comprende:
un conjunto de útil o herramienta que incluye un conjunto de cartucho que tiene una pluralidad de grapas y un conjunto de yunque , teniendo el conjunto de yunque y el conjunto de cartucho una posición abierta y una posición aproximada, estando hecho el conjunto de yunque de un material de gran calibre y estando el conjunto de cartucho montado en un conjunto de canal que tiene una pared inferior ;
y un miembro dinámico de sujeción que tiene una superficie de leva superior y una superficie de leva inferior , estando la superficie de leva superior y la superficie de leva inferior alineadas de manera sustancialmente vertical, deslizando la superficie de leva superior y la superficie de leva inferior entre el conjunto de yunque y el conjunto de cartucho, aplicándose de manera deslizable…
Conjunto de herramienta para un dispositivo de grapado quirúrgico.
(02/04/2012) Un dispositivo de grapado quirúrgico para su uso con una grapadora quirúrgica que comprende:
un conjunto de herramienta que incluye un yunque y
un conjunto de cartucho que tiene al menos una grapa, pudiendo moverse el citado conjunto de cartucho con respecto al yunque entre posiciones espaciada y aproximada;
un elemento pinzamiento posicionado contiguo a un extremo proximal del conjunto de herramienta, pudiendo moverse el elemento de pinzamiento desde una posición retrasada hasta una posición avanzada para mover al yunque y al conjunto de cartucho hasta la posición aproximada y para impedir que…
INSTRUMENTO QUIRÚRGICO MOTORIZADO.
(17/02/2012) Instrumento quirúrgico que comprende: un alojamiento ; una parte endoscópica que se extiende distalmente desde el alojamiento y que define un primer eje longitudinal (A-A); una rueda dentada de accionamiento dispuesta al menos parcialmente dentro del alojamiento , pudiendo girar la rueda dentada de accionamiento alrededor de un eje (C-C) de rueda dentada de accionamiento que se extiende a su través y pudiendo moverse selectivamente a lo largo del eje (C-C) de rueda dentada de accionamiento entre una primera posición, una segunda posición y una tercera posición; un motor de accionamiento dispuesto en cooperación mecánica con la rueda dentada de accionamiento y que está configurado para hacer girar la rueda dentada de accionamiento ; un motor de desplazamiento dispuesto en cooperación mecánica…
GRAPADORA QUIRÚRGICA CON ARTICULACIÓN UNIVERSAL Y PRESUJECIÓN DE TEJIDO.
(25/11/2011) Conjunto de herramienta que comprende: un conjunto de yunque y un conjunto de cartucho , presentando el conjunto de cartucho un5 a pluralidad de grapas y siendo móvil en relación con el conjunto de yunque entre una posición abierta y una posición aproximada, definiendo el conjunto de cartucho y el conjunto de yunque un intersticio de tejido en la posición aproximada, presentando el conjunto de yunque una ranura que se extiende desde un extremo proximal del conjunto de yunque hasta un extremo distal del yunque, presentando la ranura una parte dependiente y una parte superior transversal; un collar de sujeción ubicado adyacente al extremo proximal del conjunto de cartucho…
INSTRUMENTO QUIRÚRGICO MOTORIZADO.
(17/11/2011) Un instrumento quirúrgico para la colocación de grapas, que comprende: un conjunto de empuñadura ; una primera parte endoscópica (2020a) que se puede conectar selectivamente a una parte distal del conjunto de empuñadura y que define un eje geométrico longitudinal, cuya primera parte endoscópica incluye un alojamiento adyacente a una parte proximal de la misma, y un miembro de accionamiento; un motor dispuesto en cooperación mecánica con el alojamiento de la primera parte endoscópica, cuyo motor está conectado operativamente al miembro de accionamiento para mover a éste sustancialmente a lo largo del eje geométrico longitudinal; un primer efector de extremo (2030a) que se puede conectar…
GRAPADORA QUIRÚRGICA CON ARTICULACIÓN UNIVERSAL Y DISPOSITIVO DE SUJECIÓN PREVIA DEL TEJIDO.
(02/09/2011) Un conjunto de herramienta para una grapadora quirúrgica para utilizar en un procedimiento quirúrgico endoscópico, que comprende: un yunque y un conjunto de cartucho y un conjunto de canal que soporta al conjunto de cartucho, teniendo el conjunto de cartucho una pluralidad de grapas, siendo el conjunto de canal movible en relación al conjunto de yunque para mover el conjunto de cartucho en relación al conjunto de yunque entre una posición abierta y una posición aproximada, el conjunto de cartucho y el conjunto de yunque definiendo un espacio de tejido en la posición aproximada; un collarín de sujeción colocado adyacente al extremo proximal del conjunto de canal y siendo el extremo proximal del conjunto de yunque movible desde…
INSTRUMENTO QUIRÚRGICO MOTORIZADO.
(09/08/2011) Instrumento quirúrgico que comprende: un alojamiento ; una parte endoscópica que se extiende distalmente desde el alojamiento y que define un eje longitudinal (A-A); un engranaje de arrastre dispuesto por lo menos parcialmente dentro del alojamiento , pudiendo girar el engranaje de arrastre alrededor de un eje de engranaje de arrastre (C-C) que se extiende a través del mismo y pudiendo moverse selectivamente a lo largo del eje de engranaje de arrastre (C-C); un motor de accionamiento dispuesto en cooperación mecánica con el engranaje de arrastre y configurado para hacer girar el engranaje de arrastre ; un motor de desplazamiento dispuesto en cooperación mecánica con el engranaje de…
GRAPADORA QUIRÚRGICA CON ARTICULACIÓN UNIVERSAL Y DISPOSITIVO DE SUJECIÓN PREVIA DEL TEJIDO.
(24/03/2011) Conjunto de herramienta para un dispositivo de grapado quirúrgico, que comprende: un elemento de canal para soportar un cartucho de grapas en su interior, conteniendo dicho cartucho de grapas una pluralidad de grapas ; un yunque dimensionado para deformar dicha pluralidad de grapas expulsadas de dicho cartucho de grapas contra el mismo; un elemento flexible alargado (700a, 700b, 700c); un carro que se puede desplazar desde una primera posición a una posición siguiente que empuja a dicha pluralidad de grapas desde dicho cartucho de grapas a través de un tejido y contra dicho yunque para grapar el tejido dispuesto entre dicho yunque y dicho cartucho de grapas, incluyendo dicho carro una cavidad definida en su interior y unas aberturas (169a, 169b) en el extremo distal del carro para recibir el elemento…
DISPOSITIVO DE GRAPADO QUIRURGICO.
(02/12/2010) Dispositivo de grapado quirúrgico , que comprende: un conjunto de mango; una parte de cuerpo endoscópica y un conjunto de herramientas que está montado para la articulación con respecto a la parte de cuerpo endoscópica , que incluye: un yunque ; un conjunto de cartucho de grapas que incluye un cartucho (16a) provisto de una pluralidad de grapas quirúrgicas; y un elemento de sujeción dinámico provisto de un rebaje , estando provisto el elemento de sujeción dinámico de un reborde superior (36a) para el acoplamiento del yunque y de un reborde inferior (36b) para el acoplamiento del conjunto de cartucho , siendo…
CONJUNTO DE YUNQUE PARA DAR FORMA A UNA GRAPA.
(03/08/2010) Un conjunto de yunque , que comprende:
una placa de yunque con una superficie de contacto con tejido que define un plano y una pluralidad de cavidades de yunque formadas en ella, presentando cada una de las cavidades de yunque un eje geométrico longitudinal e incluyendo una primera y una segunda cubetas de formación de grapa, presentando cada una de ellas una parte exterior (O) y una parte interior (I), estando posicionadas las partes interiores de la primera y la segunda cubetas de formación de grapa una en relación estrecha con otra en el eje geométrico longitudinal de la cavidad de yunque, estando posicionadas las partes exteriores de la primera y la segunda cubetas de formación…
CONJUNTO DE HERRAMIENTA PARA UN DISPOSITIVO DE GRAPADO QUIRURGICO.
(22/04/2010) Un conjunto de instrumento para un dispositivo para grapado quirúrgico , comprendiendo el conjunto de instrumento:
un yunque y un conjunto de cartucho , teniendo el conjunto de cartucho una pluralidad de elementos de sujeción y siendo movible con relación al yunque entre una posición de espaciado y una posición de aproximado, definiendo el conjunto de cartucho y el yunque un espacio de separación del tejido en la posición de aproximado;
un miembro de mordaza que es movible desde una posición de retraído a una posición de avanzado, para mover al conjunto de cartucho con relación al yunque desde la posición de espaciado a la posición de aproximado; y
medios para expulsar la pluralidad de elementos…
PESTILLO DE TROCAR MOLDEADO.
(16/03/2010) Un aparato de pestillo de trocar moldeado y una pantalla que comprenden:
un alojamiento de trocar y una pantalla , cuyos alojamiento de trocar y pantalla definen un eje longitudinal central (X), incluyendo el alojamiento una base y un sombrerete ; y
un mecanismo de pestillo configurado para fijar la pantalla en una posición enclavada, cuyo mecanismo de pestillo está destinado a que un cirujano lo accione y está unido directamente de forma operativa a la pantalla , estando el mecanismo de pestillo monolíticamente formado por lo menos con uno de entre la base y el sombrerete del alojamiento del trocar y configurado para enclavar y desenclavar la pantalla ,
incluyendo el mecanismo de pestillo un pestillo y una corredera , estando el pestillo y la corredera conectados de manera operativa con la pantalla ,
estando el pestillo…
(24/02/2010) Un conjunto de cánula para ser utilizado en un proceso quirúrgico, que comprende un miembro de cánula que define un eje longitudinal, definiendo el miembro de cánula una abertura longitudinal a su través, para el paso de un instrumento quirúrgico; y un miembro de hermeticidad que se extiende a través del eje longitudinal y que tiene una forma predeterminada antes de la inserción del instrumento, incluyendo el miembro de hermeticidad un material elástico, el cual define una abertura para la recepción del instrumento y está adaptado para expandirse desde una condición abierta inicial a una condición expandida, al insertar el instrumento, estando dispuesto el miembro de hermeticidad de manera que la inserción del instrumento hace que el miembro de hermeticidad entre en contacto…
SISTEMA DE OBTURACION PARA TROCAR.
(23/11/2009) Un conjunto de sello para recepción de un instrumento quirúrgico alargado , que comprende: un cuerpo que tiene al menos una abertura configurada y dimensionada para permitir la entrada de un instrumento quirúrgico alargado y que define un eje longitudinal central; un miembro de sello dispuesto en el cuerpo exterior, estando formados los miembros de sello de un material elástico e incluyendo una sección interior (118b, 218b) que define una abertura en el mismo, estando configurada y dimensionada la abertura de tal modo que la inserción de un instrumento quirúrgico dentro de la abertura hace que el material elástico que define la abertura contacte elásticamente con la superficie exterior del instrumento quirúrgico de una manera sustancialmente estanca a los fluidos; y un elemento de pestaña periférica que está formado…
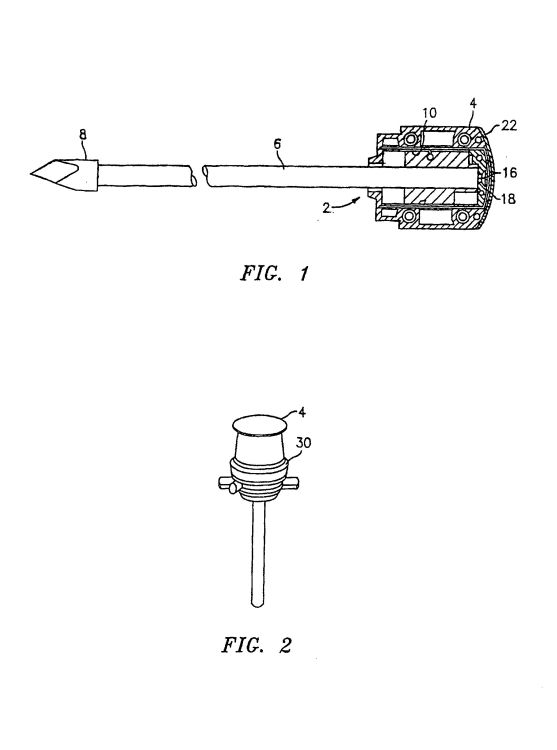
CNAJUNTO DE TROCAR CON ACTIVADOR ACOLCHADO.
Sección de la CIP Necesidades corrientes de la vida
(01/04/2009). Ver ilustración. Solicitante/s: UNITED STATES SURGICAL CORPORATION. Clasificación: A61B17/34.
Un conjunto de trocar reutilizable, que comprende: un obturador que define un eje geométrico longitudinal y que tiene extremos primero y segundo, una punta afilada situada en el primer extremo del obturador, y un asidero situado en un segundo extremo del obturador, opuesto al primer extremo, y caracterizado por un miembro acolchado situado sobre al menos una superficie de contacto de presión del asidero , y que se retira de la superficie de contacto de presión con anterioridad a la limpieza o la esterilización del conjunto de trocar.
DISPOSITIVO PARA GRAPADO QUIRURGICO.
(16/06/2008) Un dispositivo para grapado quirúrgico, que comprende: un cuerpo que tiene una parte de mango estacionario ; un disparador sujeto para pivotamiento al cuerpo; una parte de cabeza que incluye un conjunto de yunque y un conjunto de cartucho , siendo el conjunto de yunque y el conjunto de cartucho movibles cada uno con relación al otro, desde una posición de espaciados a una posición de aproximados; un mecanismo de aproximación conectado a la parte de cabeza, siendo accionable el mecanismo de aproximación para mover los conjuntos de yunque y de cartucho, cada uno con relación al otro, entre las posiciones de espaciados y de aproximados; y un conjunto de espiga de alineación que incluye una espiga de alineación que tiene…
PESTILLO DE TROCAR MOLDEADO.
(01/04/2008) Un conjunto de trocar quirúrgico que comprende: un alojamiento de trocar y una pantalla , cuyos alojamiento de trocar y pantalla definen un eje longitudinal central (X), incluyendo el alojamiento una base y un sombrerete ; y un aparato de pestillo de trocar moldeado, configurado para fijar la pantalla en una posición enclavada, cuyo aparato de pestillo está destinado a que un cirujano lo accione y está unido directamente de forma operativa a la pantalla y configurado para enclavar y desenclavar la pantalla, incluyendo el aparato de pestillo un pestillo formado monolíticamente con uno de entre la base y el sombrerete del alojamiento del trocar y estando…
(16/12/2007) Un conjunto de cánula para ser utilizado en un proceso quirúrgico, que comprende: un miembro de cánula que define un eje longitudinal, definiendo el miembro de cánula una abertura longitudinal a su través, para el paso de un instrumento quirúrgico; y un miembro de hermeticidad que se extiende a través del eje longitudinal y que tiene una forma predeterminada antes de la inserción del instrumento, incluyendo el miembro de hermeticidad un material elástico, que define una abertura para la recepción del instrumento y adaptado para expandirse desde una condición inicial abierta a una condición abierta expandida al insertar el instrumento, estando configurado el miembro de hermeticidad de manera que la inserción del instrumento hace que el miembro de hermeticidad entre en contacto elásticamente con la superficie exterior…
{kind=link}