9 inventos, patentes y modelos de OLLERO BATURONE,ANIBAL
AERONAVE CON DISPOSITIVO DE CONTACTO.
Sección de la CIP Técnicas industriales diversas y transportes
(02/06/2017). Solicitante/s: FUNDACION ANDALUZA PARA EL DESARROLLO AEROESPACIAL. Clasificación: B64C39/02, B25J9/04, B64D1/22.
Aeronave con dispositivo de contacto.
Aeronave con capacidad de vuelto estacionario y con dispositivo de contacto. Comprende un cuerpo principal de la aeronave, un sistema de propulsión , un dispositivo de contacto y una unidad de procesamiento y control. El dispositivo de contacto comprende un primer cuerpo unido al cuerpo principal y orientado sobre el centro de masas de la aeronave; un segundo cuerpo que se mueve sobre el primer cuerpo (primer grado de libertad) del dispositivo de contacto ; y un tercer cuerpo con una sección central mediante la que se vincula al segundo cuerpo con un eje de unión sobre el que gira el tercer cuerpo respecto a dicho segundo cuerpo (segundo grado de libertad), y con dos segmentos de los que un primer segmento es telescópico (tercer grado de libertad).
PDF original: ES-2614994_B1.pdf
PDF original: ES-2614994_A1.pdf
SISTEMA DE COMPENSACIÓN DE DESPLAZAMIENTO DEL CENTRO DE GRAVEDAD POR MANIPULACIÓN DE CARGAS PARA SISTEMA AÉREO NO TRIPULADO EQUIPADO CON BRAZO ROBÓTICO.
(16/10/2014) Sistema de compensación de desplazamiento del centro de gravedad por manipulación de cargas para sistema aéreo no tripulado, equipado con brazo robótico, que permite manipular cargas, y que incluye un sistema de control capaz de detectar o prever las variaciones del centro de gravedad del sistema realizando un control que aumente la estabilidad y precisión, incluyendo partes móviles para compensar total o parcialmente los desplazamientos del centro de gravedad del sistema provocados por los movimientos del sistema robótico y por las cargas manipuladas.
Sistema de inspección de elementos a presión de calderas de recuperación de centrales de generación eléctrica y método asociado.
(05/09/2014) Sistema de inspección de elementos a presión de calderas de recuperación de centrales de generación eléctrica y método asociado.
La presente invención se refiere a un sistema de inspección de elementos a presión de calderas de recuperación de centrales de generación eléctrica que comprende un robot formado a su vez por un sistema de refrigeración, otro de posicionamiento y un cabezal sensor que integra un conjunto de elementos que llevan a cabo la detección de defectos en los elementos de la caldera a inspeccionar, donde dicho cabezal sensor incorpora un periscopio abatible que junto con una cámara permite tomar imágenes del interior de la caldera para la posterior inspección y detección de los elementos a presión de la misma, mientras que el método de inspección…
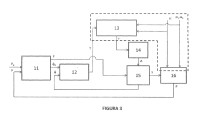
SISTEMA DE CONTROL DE AERONAVES NO TRIPULADAS DE ALA ROTATORIA PARA ATERRIZAJE VERTICAL EN SUPERFICIES MÓVILES MEDIANTE PRE-ALIMENTACION DE FUERZAS EN EL SISTEMA DE CONTROL.
(01/08/2014) Mejora del sistema de control para el aterrizaje de una aeronave VTOL no tripulada sobre una plataforma móvil, consistente en la adición de un sistema de control basado en unos sensores, que miden la tensión del cable que une la aeronave con la plataforma de aterrizaje y los ángulos de orientación de dicho cable con respecto a un sistema asociado a la aeronave, y un módulo de control que toma como entradas la tensión -tanto en magnitud como en dirección-, obtenida de los citados sensores, además de las consignas de control generadas por el controlador de la aeronave. El módulo de control objeto de la invención calcula, a partir de la tensión en el cable, correcciones a introducir en las consignas de control, que se adelantan a las perturbaciones que se producirán en la posición de la aeronave como consecuencia de los cambios…
SISTEMA DE CONTROL DE AERONAVES NO TRIPULADAS DE ALA ROTATORIA PARA ATERRIZAJE VERTICAL EN SUPERFICIES MÓVILES MEDIANTE PRE-ALIMENTACION DE FUERZAS EN EL SISTEMA DE CONTROL.
Secciones de la CIP Física Técnicas industriales diversas y transportes
(03/07/2014). Ver ilustración. Solicitante/s: UNIVERSIDAD PABLO DE OLAVIDE. Clasificación: G05D1/08, G05D1/06, B64C25/68, B64F1/12.
Mejora del sistema de control para el aterrizaje de una aeronave VTOL no tripulada sobre una plataforma móvil, consistente en la adición de un sistema de control basado en unos sensores, que miden la tensión del cable que une la aeronave con la plataforma de aterrizaje y los ángulos de orientación de dicho cable con respecto a un sistema asociado a la aeronave, y un módulo de control que toma como entradas la tensión ¿tanto en magnitud como en dirección-, obtenida de los citados sensores, además de las consignas de control generadas por el controlador de la aeronave. El módulo de control objeto de la invención calcula, a partir de la tensión en el cable, correcciones a introducir en las consignas de control, que se adelantan a las perturbaciones que se producirán en la posición de la aeronave como consecuencia de los cambios en la tensión del cable.
(04/06/2014) Un método para proporcionar datos de encaminamiento que se usarán para encaminar un mensaje desde un nodo de origen a los nodos de destino disponibles a través de una red ad hoc móvil, comprendiendo el método:
proporcionar una lista de nodos y la posición de cada nodo;
obtener, a partir de la lista de nodos, una lista de los nodos vecinos correspondientes a los nodos de la lista que se encuentran dentro de la cobertura de comunicación directa con el nodo de origen;
proporcionar una función de coste;
y caracterizado por:
usar, para cada nodo vecino, la función de coste para calcular los costes más bajos del envío de mensajes a los nodos de destino disponibles respectivos; y
generar datos de encaminamiento que se ordenen de acuerdo con una dirección del nodo de destino disponible, y asociar las entradas…
EQUIPO DE OBTENCIÓN DE INFORMACIÓN EN OBRAS E INFRAESTRUCTURAS BASADO EN UN VEHÍCULO AÉREO NO TRIPULADO.
(30/08/2012) Equipo de obtención de información en obras e infraestructuras basado en vehículo aéreo no tripulado, (UAV) que comprende, al menos:
(i) un vehículo aéreo no tripulado (UAV) que comprende medios para su control y operación desde tierra, medios de adquisición y medios de registro sincronizado de imágenes y datos; y
(ii) una estación en tierra (ET) comprendiendo, a su vez, un dispositivo de radio-control, y un computador para ayuda a la operación comprendiendo medios para la planificación, construcción y mantenimiento de obras e infraestructuras, incluyendo la geo-referenciación de las imágenes, la construcción de mapas en dos y tres dimensiones, y la obtención de medidas entre puntos y rasgos característicos.
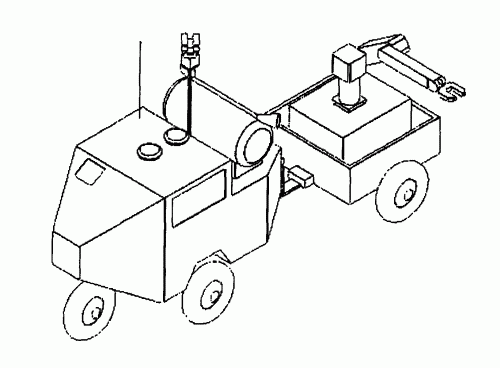
SISTEMA ROBOTIZADO PARA SERVICIO EN INVERNADEROS.
Secciones de la CIP Física Necesidades corrientes de la vida
(16/03/2005). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: G05D1/02, G06T1/00, A01B69/00, G08C21/00.
Sistema robotizado para servicio en invernaderos, caracterizado por una cabeza tractora autónoma, con capacidad sensorial y una estación para carga de pago, y un remolque también para carga de pago. El sistema puede portar diversos equipos necesarios para el trabajo en los invernaderos, como aparatos de fumigación, cámaras de inspección o brazos robot para recolección u otras tareas. El sistema puede moverse dentro del invernadero, bien autónomamente, gracias a un controlador y a sus sensores, entre los que puede contarse un sistema de posicionamiento global, bien según un plan establecido previamente, bien ser controlado remotamente por un operador humano con auxilio de cámaras de a bordo.
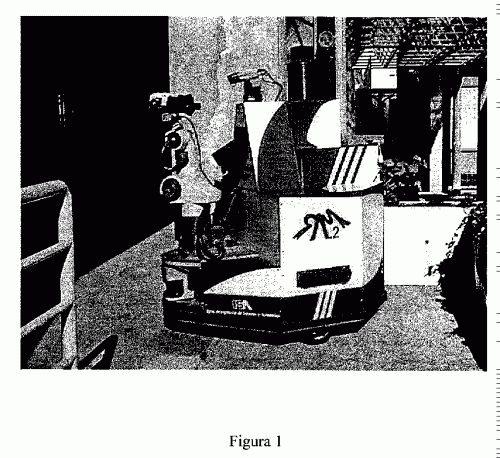
VEHICULO ROBOTICO CON CAPACIDAD DE NAVEGACION AUTONOMA DOTADO DE BRAZO ARTICULADO PARA LA MANIPULACION REMOTA DE OBJETOS.
Secciones de la CIP Física Técnicas industriales diversas y transportes
(01/06/2004). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: G05D1/02, B25J5/00, B25J9/06, B25J15/02.
Vehículo robótico con capacidad de navegación autónoma dotado de brazo articulado para la manipulación remota de objetos. La presente invención consiste en una máquina programable de uso general compuesta de un vehículo con capacidad de navegación en interiores y de un brazo articulado dotado de una garra servo- controlada para el manejo remoto de objetos. El sistema robot comprende un sistema de manipulación autónomo, un sistema de locomoción que emplea ruedas, un sistema sensorial complejo y diverso, un sistema de control basado en una red de computadores, un sistema de alimentación eléctrica por baterías y un sistema de comunicaciones radio con estaciones remotas. El robot está preparado para desenvolverse en entornos estructurados, como edificios, almacenes o fábricas. Las tareas que es capaz de realizar el sistema robot incluyen coger, transportar y soltar pequeños objetos tales como libros o cintas de video y presionar o girar dispositivos sencillos como interruptores o picaportes.
{kind=link}
{kind=link}
{kind=link}