Procedimiento y transceptor para diversidad de red en comunicaciones de larga distancia.
(29/07/2020) Un procedimiento en un nodo principal para la comunicación con un nodo de destino sobre largas distancias, comprendiendo el procedimiento las etapas de;
• sincronizar (S11) el nodo principal y un nodo auxiliar utilizando al menos un recurso de comunicaciones,
• generar (S13) una señal principal y una señal auxiliar a partir de una cantidad de información,
• transmitir (S14) la señal principal al nodo de destino utilizando el al menos un recurso de comunicaciones,
• transmitir (S15) la señal auxiliar al nodo auxiliar utilizando el al menos un recurso de comunicaciones, caracterizado…
Un sistema de antena para diversidad de polarización.
(03/06/2020) Un sistema de antena que comprende una estructura de antena que consiste en un único elemento de antena que tiene unos puertos de antena primero y segundo dispuestos para pasar unas señales de antena primera y segunda respectivas, estando las señales de antena primera y segunda dispuestas para obtenerse a partir de una primera señal de antena común (J1) y dispuestas para ser esencialmente iguales en envolvente, estando la estructura de antena dispuesta para tener un patrón de antena que puede seleccionarse entre un primer patrón de antena que tiene una primera polarización y un segundo patrón de antena que tiene una segunda polarización sustancialmente ortogonal a la primera polarización, seleccionándose el primer patrón de antena configurando…
Disposición de eje de pivote.
(27/05/2020) Una disposición de antena de radar que comprende:
- una disposición de eje de pivote ,
- un primer elemento estructural compuesto por un mástil y un dispositivo de transmisión , en el que dicho mástil de dicho primer elemento estructural está unido a dicha disposición de eje de pivote y en el que dicho dispositivo de transmisión está unido a dicho mástil ,
- un segundo elemento estructural en forma de una estructura de sujeción , comprendiendo dicha estructura de sujeción dos elementos de fijación de eje de pivote , de tal manera que la disposición del eje de pivote puede ser montada en dicha estructura de sujeción, y…
Contenedor de la contramasa para su uso en un arma sin retroceso y un arma sin retroceso que comprende dicho contenedor de la contramasa.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(29/04/2020). Inventor/es: NILSSON, MATS. Clasificación: F41A1/10, F41F3/042.
Un contenedor de la contramasa para su uso en un arma sin retroceso que comprende una envoltura que encierra una contramasa , en el que el envoltura se divide en una sección frontal y una sección trasera , caracterizado porque la sección trasera de la envoltura tiene una construcción más débil que la sección frontal de la envoltura para agrietarse más fácilmente que la sección frontal de la envoltura , en el que la sección frontal de la envoltura está provista de acanaladuras para crear conductos entre el extremo frontal de la sección frontal y el extremo frontal de la sección trasera , en el que las acanaladuras están dispuestas alrededor de la sección frontal en dirección longitudinal y distribuidas uniformemente alrededor de la sección frontal.
PDF original: ES-2794089_T3.pdf
Radar de formación de imágenes subsuperficie.
(22/04/2020) Un procedimiento para eliminar los ecos parásitos superficiales en el radar de apertura sintética, SAR, formación de imágenes de objetivos de subsuperficie en un sistema SAR, comprendiendo el procedimiento:
- seleccionar una primera frecuencia y un ángulo (x0) de incidencia para una señal de radar de tal modo que la relación de retro dispersión superficial a retro dispersión objetivo subsuperficial sea mayor para la polarización vertical que para la polarización horizontal;
- obtener , transmitiendo y recibiendo componentes del sistema SAR y con la ayuda de una aeronave en vuelo , una imagen FV (x, y) SAR polarizada verticalmente y una imagen FH (x, y) SAR polarizada horizontalmente…
Procedimiento para mejorar la precisión de un sistema de navegación en base a radio.
(25/03/2020) Un procedimiento para mejorar la precisión de un sistema de navegación en base a radio para corregir una posición dada por dicho sistema de navegación en base a radio con un vector de corrección derivado a partir de datos de localización almacenados en una base de datos del mapa, en el que el vector de corrección es calculado mediante;
(a) medición de coordenadas de posición del sistema de navegación en base a radio,
(b) seleccionar en base a las coordenadas de posición medidas de las coordenadas de posición del sistema de navegación en base a radio, un conjunto de datos de mapas en 3D para dichas coordenadas de posición medidas a partir de una base de datos del mapa,
(c) determinar a partir de los datos del mapa en 3D…
Disposición de contramedidas.
(18/03/2020) Una disposición de contramedidas que comprende,
un distribuidor de contramedidas ,
una envoltura que encierra al menos parcialmente el distribuidor de contramedidas , un primer medio de control para controlar el distribuidor de contramedidas , medios de suspensión dispuestos en la envoltura para suspender la envoltura en una aeronave ;
el medio de suspensión tiene una forma y un diseño que corresponden sustancialmente a la forma y el diseño de un carril de suspensión de un misil , de modo que el medio de suspensión coincide con un punto duro en la aeronave , que está adaptado al misil , caracterizado porque
el distribuidor de contramedidas comprende una primera y una segunda…
Elemento de banda ancha montado en superficie.
(05/02/2020) Una antena que comprende un plano de tierra y al menos un primer y un segundo elemento de antena , en la que cada elemento de antena comprende un punto de alimentación , una cavidad , un cuerpo principal , una punta y al menos una primera porción agudizada y una segunda porción agudizada ,
en la que cada elemento de antena está dispuesto en el plano de tierra , en la que dichas primeras y segundas porciones agudizadas se extienden a lo largo del elemento de antena desde dicha punta hacia dicho plano de tierra del elemento de antena , y en la que cada elemento de antena se extiende en forma esencialmente perpendicular a dicho plano de tierra a lo largo de un eje central del elemento de antena,
en la que cada elemento de antena…
Procedimiento de determinación de una dirección a un objeto emisor de señal.
(25/12/2019) Un procedimiento de determinación de una dirección a un objeto emisor de señal basado en tierra por medio de una plataforma que comprende al menos dos antenas separadas por una distancia conocida, que comprende las etapas de:
- recibir, con cada una de dichas al menos dos antenas , una señal de dicho objeto emisor de señal en unas primeras posiciones (41a),
- determinar una relación de primera fase de dicha señal entre dichas al menos dos antenas ,
- recibir, con cada una de dichas al menos dos antenas , una señal desde dicho objeto emisor de señal en al menos unas segundas posiciones (41b),
- determinar al menos una relación de segunda fase de dicha señal entre dichas al menos dos antenas , caracterizado por las etapas de:
- determinar cambio(s) en posición(es) de al menos una…
Un sistema y procedimiento para rastrear y guiar múltiples objetos.
(25/12/2019) Un sistema de guiado para dar seguimiento y guiar al menos dos objetos , en el que dicho sistema de guiado comprende:
una estación base que incluye un sistema de obtención de imágenes ópticas configurado para determinar el vector de posición angular de dichos al menos dos objetos ,
un enlace de comunicación óptica configurado para transmitir comandos de control de guiado y enviar señales de interrogador desde dicha estación base a dichos al menos dos objetos , comprendiendo dicho enlace de comunicación óptica al menos un transmisor óptico de enlace ascendente localizado en dicha estación base , y al menos un receptor óptico de enlace ascendente localizado en cada uno de dichos almenos dos objetos , medios de dirección…
Sensor de presión de fibra óptica que comprende cavidad y red dentro del núcleo.
Sección de la CIP Física
(25/12/2019). Inventor/es: FISK,FREDRIK, ANDERSSON,BJÖRN-ERIK. Clasificación: G01D5/353, G01B11/16, G01L11/02, G02B6/032.
Fibra óptica que comprende un núcleo y, de manera opcional, una cubierta , revestimiento o recubrimiento que rodea dicho núcleo, comprendiendo el núcleo al menos una red de Bragg y al menos una cavidad interna cerrada , caracterizada porque dicha al menos una red de Bragg está asociada con dicha cavidad de forma que la cavidad interna permita a la red cambiar su forma física por medio de una diferencia de presión entre la presión dentro de la cavidad y la presión que rodea la fibra cuando la presión que rodea la fibra cambia, en la que la red de Bragg rodea por completo la cavidad o en la que la red de Bragg tiene una extensión longitudinal en la dirección longitudinal del núcleo al menos a lo largo de la totalidad de la extensión longitudinal de la cavidad interna cerrada.
PDF original: ES-2774317_T3.pdf
Disposición de antena para un sistema de radar.
(16/10/2019) Una disposición de antena para un sistema de radar dispuesto para cubrir un área de vigilancia y que comprende elementos de antena , estando dispuestos los elementos de antena para recibir una señal transmitida desde una antena de transmisión de una disposición de antena de transmisión y reflejada por un objetivo hacia la disposición de antena, caracterizado porque:
- la disposición de antena comprende al menos tres matrices de líneas , cada matriz de líneas está alineada a lo largo de al menos una parte de un primer , un segundo y un tercer borde de un tetraedro , y que comprende al menos dos elementos de antena ,
- cada elemento de antena se conecta a un receptor donde cada matriz de líneas se dispone…
Un sistema de liberación de contramedidas pirotécnicas.
(26/06/2019) Un sistema de liberación de contramedidas pirotécnicas que comprende:
- un liberador que incluye una carcasa y un conjunto de miembros de contacto (27, 27' ) de un circuito electrónico de lanzamiento ;
- un primer almacén (A) diseñado para alojar las contramedidas pirotécnicas , pudiendo montarse el primer almacén (A) en la citada carcasa de tal manera que un cuerpo de contacto de cada contramedida pirotécnica pueda estar en comunicación eléctrica con un miembro de contacto dedicado del circuito electrónico de lanzamiento cuando el sistema está listo para el uso;
- una unidad electrónica central asociada con el circuito electrónico de lanzamiento para activar la contramedida pirotécnica alojada…
Procedimiento y sistema de determinación de una relación entre una primera escena y una segunda escena.
(19/06/2019) Un procedimiento implementado por un ordenador para determinar una relación entre una primera escena y una segunda escena, comprendiendo dicho procedimiento las etapas de
- generar al menos una imagen de sensor de una primera escena con al menos un sensor,
- acceder a información relacionada con al menos una segunda escena, abarcando dicha segunda escena dicha primera escena, y
- casar la imagen de sensor con la segunda escena para cartografiar la imagen de sensor sobre la segunda escena,
caracterizado porque
la etapa de acceder a información relacionada con al menos una segunda…
Procedimiento de integración de una antena en el fuselaje de un vehículo.
Sección de la CIP Electricidad
(19/06/2019). Inventor/es: HOLTER, HENRIK, FORSLUND,OLA. Clasificación: H01Q1/32, H01Q21/06, H01Q17/00, H01Q1/28, H01Q21/00.
Un bastidor de antena para una antena de red de microcinta adecuado para un vehículo, estando dicho bastidor de antena destinado a reducir la sección transversal de radar del vehículo cuando la antena y el bastidor de antena están unidos al vehículo, caracterizado porque
- el bastidor de la antena está dispuesto para rodear una periferia de abertura de antena;
- el bastidor de la antena comprende una región de transición que tiene un perfil que se estrecha con un lado biselado de una primera anchura (L1) cuando se ve en sección transversal y en una dirección desde el bastidor de la antena circundante hacia un rebaje así formado en el que la antena está destinada a ser colocado, y en el que;
- un primer material absorbente está unido al lado biselado del perfil que se estrecha.
PDF original: ES-2717228_T3.pdf
Vehículo de superficie no tripulado.
(01/05/2019) Vehículo de superficie no tripulado que comprende una disposición quilla-mástil en el que al menos una quilla está dispuesta en al menos un mástil para formar la disposición quilla-mástil y la disposición quilla-mástil está dispuesta de manera móvil en una estructura de múltiples cascos de dicho vehículo de superficie no tripulado, en el que la disposición quilla-mástil está dispuesta con una articulación rotatoria en la estructura de múltiples cascos entre un primer casco alargado y un segundo casco (21', 22') alargado, en el que la estructura de múltiples cascos comprende cuatro flotadores (21, 21',22, 22') alargados dispuestos por medios (23, 23') de sujeción de dicho vehículo de superficie no tripulado, de manera que un primer flotador y un segundo…
Tobera de escape variable para motor a reacción y procedimiento de variación de la tobera.
(17/04/2019) Una tobera de escape variable para un motor a reacción, comprendiendo la tobera una porción aguas arriba, unos medios de aleta que pueden conectarse de manera pivotante al motor a reacción a través de la porción aguas arriba, comprendiendo los medios de aleta una porción (16') aguas abajo que forma un borde (19') lineal aguas abajo, estando dispuestos los medios (20, 20h) de accionamiento para accionar dichos medios de aleta para la variación del área (A1, A2) de sección transversal de las toberas entre una primera posición y una segunda posición, los medios de aleta comprenden medios de aleta de conformación para formar el área (A1, A2) de sección transversal y medios de aleta intermedios, estando interpuesto entre dichos medios de aleta de conformación, en la que dichos medios…
Simulación y ensayo de aviónica.
(12/04/2019) Sistema anfitrión de aplicación en aviónica para simular y / o ensayar una serie de aplicaciones (A1 - A4) particionadas dispuestas para ser periódicamente ejecutadas sobre un sistema diana, en el que el sistema diana es un sistema de control de aviónica distribuido de un vehículo aéreo, en el que cada una de las aplicaciones está dividida en una o más particiones, y en el que cada aplicación comprende una o más tareas, comprendiendo el sistema anfitrión una serie de módulos funcionales, en el que la serie de módulos funcionales comprende:
- un módulo de aplicación dispuesto para importar dicha serie de aplicaciones (A1 - A4) particionadas en un formato binario no modificado compilado para el sistema diana,
- un módulo de…
Dispositivo iniciador y método para fabricar tal dispositivo.
(10/04/2019) Dispositivo de accionamiento que comprende
- una carga de accionamiento dispuesta en un recipiente de accionamiento;
- un dispositivo iniciador, que comprende al menos un detonador y al menos una carga multiplicadora, en el que la carga multiplicadora se dispone en una funda de multiplicador configurada con una parte cilíndrica posterior que tiene el diámetro D1, y una parte cónica frontal delimitada por una primera cara de límite circular que tiene el diámetro D1 y una segunda cara de límite circular que tiene el diámetro D2, en el que las dos caras de límite son planoparalelas a la distancia H1 una de otra y en el que H1/D2 se encuentra en el intervalo de 0,5-1,5,
en el que la carga multiplicadora se dispone de tal manera que, en la iniciación de dicha carga de accionamiento, está libre…
Sistema y procedimiento de planificación de ruta para minimizar la exposición a amenazas.
(03/04/2019) Un sistema para planificar un redireccionamiento de ruta dispuesto para ser montado en un objeto en movimiento, comprendiendo dicho sistema: un módulo de planificación de ruta dispuesto para replanificar una ruta del objeto en movimiento a petición, caracterizado porque el módulo de planificación de ruta está dispuesto para:
determinar una pluralidad de rutas disponibles con base en áreas de amenaza identificadas, y para cada ruta disponible determinada:
realizar cálculos de campo visual en un mapa 3D para encontrar posiciones/zonas desde las cuales el objeto en movimiento es visible durante dicho período de tiempo predeterminado, en el que el período de tiempo predeterminado es…
Disposición para bloquear condiciones de armado.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(11/03/2019). Inventor/es: ANDERSSON, BENGT, KARLSSON, PER, STRAND,FILIP. Clasificación: F42C15/24, F42C15/32, F42C15/18, F42C15/36.
Disposición para bloquear condiciones de armado para impedir el armado no intencionado de las unidades de seguridad, armado y ignición de unidades de munición cuando la unidad de munición está sometida a amenazas externas, en la que se proporciona una aleación con memoria de forma esencialmente en forma de anillo en colaboración con un rebaje en un émbolo comprendido en relación con la unidad de SAI y un rebaje fijo para impedir el movimiento axial del émbolo cuando se somete a calentamiento cambiando la forma de la aleación con memoria de forma esencialmente en forma de anillo para bloquear el émbolo con respecto al rebaje fijo.
PDF original: ES-2703550_T3.pdf
Un recubrimiento poroso aplicado a un artículo aéreo.
(13/12/2018) Un artículo aéreo que comprende: un revestimiento de composite, un borde de ataque que se orienta hacia el flujo (a) de aire durante el uso del artículo aéreo, un recubrimiento resistente a la erosión que comprende un material metálico y una superficie aerodinámica, caracterizado porque el recubrimiento cubre parcialmente o completamente el revestimiento de composite del artículo aéreo, en el que el recubrimiento tiene una porosidad alta para proporcionar un área abierta, paso de difusión, para permitir el transporte de humedad (MT) desde el revestimiento de composite hasta la superficie aerodinámica del recubrimiento , y de tal baja porosidad que la protección contra la erosión del revestimiento de composite se alcanza aún durante dicho…
Procedimiento para establecer reglas para un dispositivo concebido para que pueda usarse en la generación de apoyo de decisiones.
(05/12/2018) Procedimiento para gestionar un sistema de reglas en un dispositivo para determinar y/o controlar el comportamiento de una entidad , comprendiendo el dispositivo
una unidad de supervisión dispuesta para manejar dicho sistema de reglas para el comportamiento,
la unidad de supervisión comprende al menos un elemento de almacenamiento en el que se almacena una estructura de reglas que comprende un conjunto de reglas completa o parcialmente ya formuladas para el comportamiento; siendo la estructura de reglas tal que una regla comprende una o más premisas y una o más conclusiones , y
el sistema de reglas se divide en una pluralidad…
Disposición de suministro de energía para distribución de energía.
(03/12/2018) Disposición de suministro de energía para la distribución de energía desde una fuente de alimentación de CC que tiene un terminal positivo y un terminal negativo para, al menos, un primer y un segundo consumidores de energía de CC , que comprende:
un primer consumidor de energía de CC conectado a dicho terminal negativo de dicha fuente de alimentación de CC por medio de al menos una primera línea de retorno ,
un primer convertidor conmutado de energía de CC-CC conectado a dicho primer consumidor de energía de CC , y conectado a dicho terminal positivo de dicha fuente de alimentación de CC,
un segundo consumidor de energía de CC conectado a dicho terminal negativo de dicha fuente de alimentación de CC…
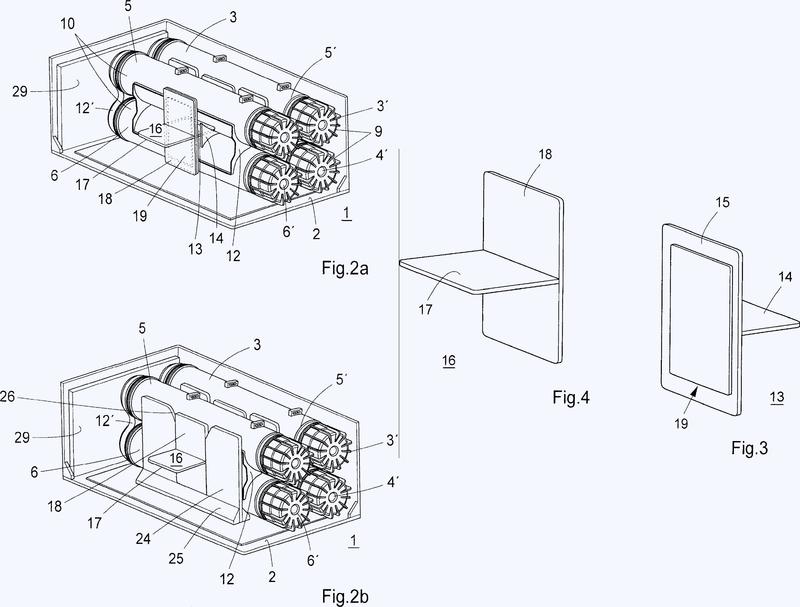
Recipiente para envasar y almacenar unidades de munición, unidad de carga que comprende tales recipientes y método para envasar y almacenar tales recipientes.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(21/11/2018). Ver ilustración. Inventor/es: KARLSSON, PER, WIDLUND,THOMAS, RÅDMAN,MAGNUS. Clasificación: F42B39/14, F42B39/24.
Recipiente para envasar y almacenar unidades de munición tales como cartuchos (5', 6') para evitar una detonación en masa, que comprende una pluralidad de tubos dispuestos uno al lado del otro para almacenar una unidad de munición cada uno, caracterizado porque los tubos comprendidos están conectados en pares , de manera que cada par de tubos está separado por una protección (13, 13', 16, 16') contra la detonación en forma de T dispuesta con la base de la forma de T extendiéndose hacia un espacio entre los tubos de un par y con la sección superior de la forma de T dispuesta para separar el par de tubos de pares de tubos adyacentes.
PDF original: ES-2690541_T3.pdf
Sistema de arma de entrenamiento para fusiles antitanque sin retroceso.
(06/11/2018) Sistema de arma de entrenamiento destinado para un fusil antitanque sin retroceso, comprendiendo el sistema de arma de entrenamiento un cañón subcalibre para disparar proyectiles de práctica subcalibre dotados de placas de base, estando dispuesto el cañón subcalibre en un cuerpo de tipo obús en el cañón del fusil antitanque sin retroceso, estando montada la parte delantera del cañón subcalibre en una parte de guía para centrar el cañón , y estando montada una parte trasera del cañón en una recámara , comprendiendo la recámara un canal de disparo y una rosca de tornillo de boquilla para montar un tornillo de boquilla, que está dispuesto en la parte trasera del cuerpo de tipo obús, caracterizado porque el sistema de arma de entrenamiento comprende al menos una parte de bloqueo que comprende una brida…
Cálculo del tiempo que falta y del tamaño de un objeto en base a la correlación de escala entre imágenes que provienen de un sensor electro - óptico.
(02/05/2018) Un procedimiento para calcular un valor de Tiempo Que Falta, TTG, entre un vehículo y un objeto intrusivo, comprendiendo el citado procedimiento:
• un paso de recuperar (S43) consistente en recuperar una primera imagen del citado objeto intrusivo en un primer instante temporal, T0, y una segunda imagen del citado objeto intrusivo en un segundo instante temporal, T1;
• un paso de filtrar (S44) consistente en filtrar la citada primera imagen y la citada segunda imagen de manera que la citada primera imagen y la citada segunda imagen se hagan independientes de la energía de señal absoluta y de manera que los bordes se realcen;
• un paso de establecer (S45) consistente en establecer…
Sistema de montaje para módulos de emisor - receptor.
(21/03/2018) Un sistema de montaje que comprende unos módulos TRM:s de emisor - receptor que forman parte de una red de barrido electrónicamente activa, AESA, en el que cada TRM :
- está provisto de una parte superior de antena y una parte inferior de componentes electrónicos, donde la parte superior de antena es una antena activa y la parte inferior de componentes electrónicos está provista de:
- unos medios de contacto de TRM sobre un extremo opuesto a la parte superior de antena,
- un collarín entre la parte superior de antena y la parte inferior de componentes electrónicos, en el que dicho collarín es un blindaje CEM y está adaptado para su cierre estanco contra un plano …
Navegación mediante puntos de referencia.
(10/01/2018) Un procedimiento de control de un Vehículo Aéreo No Tripulado desde una estación de control por medio de un enlace de comando inalámbrico, que implica:
control de vuelo en un modo autónomo en el que el vehículo vuela de acuerdo con una ruta primaria (R1, R1') definida por un primer conjunto de puntos de referencia predefinidos (WP1-WP8, IP),
control de vuelo en un modo manual en el que el vehículo vuela de acuerdo con una ruta primaria (R1') definida por comandos de control recibidos a través del enlace de comando inalámbrico, y
supervisión funcional de un conjunto de parámetros de control de vuelo (P1-Pn) tanto en el modo autónomo como el modo manual, en…
Medio de guiado de aire para dispensador.
(06/12/2017) Un medio de guiado de aire para un dispensador de una aeronave , comprendiendo el medio de guiado de aire al menos una toma de admisión de aire adaptada para guiar una corriente de aire a una abertura de alimentación en salida para señuelos antirradar en el dispensador , de manera que se crea una diferencia de presión detrás del dispensador en la abertura de alimentación en salida , para facilitar que los paquetes de señuelos antirradar sean liberados del dispensador , en el que un medio de control está provisto para controlar la corriente de aire a través de la al menos una toma de admisión de aire , en el que la al menos una toma de admisión de aire comprende una entrada de aire y una salida de aire , caracterizado porque el medio de control está dispuesto para cerrar…
Sistema de espoleta de múltiples modos de retraso de activación y activación dinámica.
(16/08/2017) Sistema de espoleta de múltiples modos para su uso en una ojiva para combatir un blanco, comprendiendo dicho sistema de espoleta de múltiples modos al menos un sensor de blanco conectado eléctricamente a un bloque de procesamiento de señal y un bloque de I/O, en el que dicho bloque de I/O puede ajustarse por el operario de la ojiva, en el que dicho sensor de blanco está adaptado para generar una salida eléctrica en respuesta a la velocidad de deceleración de la ojiva y en el que dicho sistema de espoleta de múltiples modos está adaptado para distinguir la dureza del blanco basándose en la salida eléctrica de dicho sensor de blanco y…
Sistema de radar y procedimiento para radar de apertura sintética.
(16/08/2017) Un sistema de radar para un radar de apertura sintética, SAR, que comprende una disposición de al menos un transmisor , un primer receptor (RX) y un segundo receptor (RX), una primera antena y una segunda antena y medios (208, 202, 204, 210, 503, 504, 505a, 505b, 507a, 507b, 701, 702) de procesamiento de señales ubicados en una plataforma dispuesta para moverse sobre el terreno y dispuesta para transmitir una forma de señal conocida y recibir señales reflejadas desde el terreno, siendo las señales recibidas usadas para producir una imagen SAR del terreno, comprendiendo la imagen SAR un número de células de resolución, estando el sistema de radar adicionalmente dispuesto para operar en una banda de frecuencia…
{kind=link}