24 patentes, modelos y diseños de KUKA ROBOTER GMBH
Procedimiento y dispositivo de simulación para la medición de un componente y la optimización de la medición real correspondiente.
Secciones de la CIP Técnicas industriales diversas y transportes Física
(17/01/2018). Inventor/es: HAAG, MICHAEL, BONGARDT, THOMAS, BERNHARD,Christian. Clasificación: B25J9/16, G01B11/25, G05B19/4069.
Procedimiento para la medición de una característica de un componente , con los pasos:
a) la preparación de una situación de medición con un dispositivo de detección y con el componente ; b) la medición de la característica con el dispositivo de detección;
c) la preparación (S10, S20) de una situación de medición virtual con un modelo virtual (1') del dispositivo de detección y con un modelo virtual (2.1') de la característica ; y
d) la medición virtual (S30) del modelo de característica (2.1') con el modelo de dispositivo de detección (1'), caracterizado porque la medición virtual comprende una toma de imagen virtual (S30) de una imagen, reflejada por la característica virtual (2.1') y detectada por el dispositivo de detección virtual (1'), de un patrón (3') reflejado por la característica virtual (2.1'), siendo proyectado virtualmente el patrón reflejado (3') sobre la característica virtual (2.1') por al menos un emisor.
PDF original: ES-2663537_T3.pdf
Dispositivo auxiliar y procedimiento para colocar a medida una disposición de medición óptica que se puede montar en un manipulador.
Secciones de la CIP Física Técnicas industriales diversas y transportes
(10/01/2018). Inventor/es: IBACH,THOMAS, LAUBEL,BERNHARD, LESKOVAR,MATEJ, LINNENBAUM,HOLGER, PASKUDA,MARTIN. Clasificación: G01B11/00, B25J9/16, G01B21/04.
Dispositivo auxiliar para la colocación a medida de una disposición de medición óptica que puede montarse en un manipulador , en el cual el dispositivo auxiliar presenta una zona de fijación para la fijación del dispositivo auxiliar con respecto a la disposición de medición óptica , y un objetivo de sensor que está dispuesto sobre el dispositivo auxiliar de tal manera que en la posición ensamblada del dispositivo auxiliar con la disposición de medición óptica se encuentra en un espacio de medición del sensor óptico , y en el cual el dispositivo auxiliar está provisto de marcas de medición (22').
PDF original: ES-2663494_T3.pdf
Biblioteca de módulos de procesos y entorno de programación para la programación de un proceso de manipulador.
(22/03/2017) Entorno de programación gráfica para la programación de un proceso de manipulador, en particular un proceso de montaje, con una pluralidad de módulos funcionales gráficos para realizar respectivamente un proceso parcial, pudiendo controlarse al menos un proceso parcial y/o al menos un manipulador durante la programación, en particular en línea, mediante uno de estos módulos funcionales, representando un módulo funcional un módulo de proceso o una instrucción básica de una biblioteca de módulos de procesos con una pluralidad de módulos de procesos parametrizables ("search()", "peg_in_hole()", "gear()", "screw()" para realizar respectivamente un proceso parcial, en particular común para…
Dispositivo de mecanizado.
Sección de la CIP Técnicas industriales diversas y transportes
(22/03/2017). Inventor/es: MAISCHBERGER, JOHANN. Clasificación: B60J10/00, B23P19/04.
Dispositivo para el mecanizado en forma de banda de piezas de trabajo , especialmente para la aplicación de un medio en una pieza de trabajo , con una herramienta de mecanizado , un alimentador de medios y un dispositivo de movimiento para producir un movimiento relativo entre el medio y la pieza de trabajo , en el que el dispositivo de movimiento presenta un manipulador de múltiples ejes que tiene uno o varios ejes I - VII flexibles accionados y que guía la herramienta de mecanizado , y en el que el/los eje/s I - VII flexibles presenta/n una regulación de flexibilidad, en concreto, una mera regulación de fuerza o una combinación de regulación de posición y de fuerza, y el manipulador presenta varios elementos unidos entre sí de forma articulada y accionados de forma controlada y al menos uno o varios sensores para detectar la solicitación de al menos uno de sus elementos , especialmente para detectar las fuerzas y/o los momentos que actúan.
PDF original: ES-2626663_T8.pdf
PDF original: ES-2626663_T3.pdf
Procedimiento y dispositivo para la despaletización de embalajes secundarios apilados.
Secciones de la CIP Técnicas industriales diversas y transportes Necesidades corrientes de la vida
(12/10/2016). Inventor/es: BAUMANN, MICHAEL, FELLNER,HERBERT. Clasificación: B65G59/02, B65G61/00, A44B99/00.
Procedimiento de despaletización de embalajes secundarios apilados, donde los embalajes secundarios son levantados mediante adherencia por rozamiento y se introduce bajo los mismos al menos un asiento de soporte; caracterizado por el hecho de que los embalajes secundarios son levantados por dos lados mútuamente opuestos, y de que por dos lados mútuamente opuestos se introducen bajo los embalajes secundarios levantados dos asientos de soporte.
PDF original: ES-2323907_T5.pdf
PDF original: ES-2323907_T3.pdf
(22/06/2016) Transportador para transportar una mercancía a lo largo de un recorrido de transporte, que presenta varias ruedas Mecanum (1a, 1b) dispuestas en forma de matriz directamente unas junto a otras y directamente unas detrás de otras que comprenden respectivamente varios cuerpos de rodadura cuyos ejes de giro están orientados en un ángulo agudo (α) con respecto al eje de giro de la rueda Mecanum (1a, 1b) y cuyas superficies de rodadura forman al menos una parte del recorrido de transporte del transportador , estando orientados los ejes de giro de los cuerpos de rodadura de dos ruedas Mecanum (1a,…
Aparato de mano y procedimiento para controlar y/o programar un manipulador.
Secciones de la CIP Física Técnicas industriales diversas y transportes
(25/05/2016). Inventor/es: SEDLMAYR,ANDREAS. Clasificación: G01S5/16, B25J9/16.
Aparato de mano portátil para controlar y/o programar un manipulador, especialmente un robot, con un dispositivo de manipulación para la manipulación del aparato de mano por un usuario;
un elemento palpador en el que está definido un punto de referencia (R);
un dispositivo de registro de posición , unido al elemento palpador, especialmente de forma separable, para registrar una posición (x, y, z, α, β, γ) del punto de referencia;
caracterizado por que
el dispositivo de manipulación y el dispositivo de registro de posición están unidos entre sí de forma articulada, y
el aparato de mano presenta un dispositivo de registro de fuerza para registrar una fuerza de reacción (F) que actúa sobre el elemento palpador.
PDF original: ES-2580833_T3.pdf
Procedimiento para montar piezas constructivas mediante un robot industrial.
(02/03/2016) Procedimiento para montar una pieza constructiva , que presenta un tramo de introducción y un tramo de sujeción , en una abertura de una pieza de trabajo mediante un robot industrial , que presenta un efector terminal que conduce la pieza constructiva en el tramo de sujeción , con las siguientes etapas:
- aproximar (S1) el tramo de introducción de la pieza constructiva a la abertura mediante el movimiento del robot industrial ;
- aumentar fuerzas de proceso (S2) mediante el robot industrial tras un contacto del tramo de introducción de la pieza constructiva con la pieza de trabajo hasta alcanzar un umbral de fuerza de proceso (P), almacenándose…
Dispositivo y procedimiento para la generación asistida por ordenador de una línea de manipuladores.
(06/01/2016) Procedimiento para la generación asistida por ordenador de una trayectoria de manipulador con los siguientes pasos:
- puesta a disposición y carga (S30) de una herramienta virtual ;
- generación (S40) de una trayectoria de herramienta virtual a base de un componente virtual y de la herramienta virtual cargada;
- puesta a disposición y carga (S50) de una cinemática de manipulador virtual ;
- puesta a disposición y carga (S50) de un sistema de control de manipuladores virtual;
- generación (S60) de una trayectoria de manipulador virtual a base de la trayectoria de herramienta virtual y de la cinemática de manipulador virtual;
- edición (S70) de valores de proceso de un proceso de manipulador virtual después de la generación de la…
Procedimiento y dispositivo para el control de un manipulador.
(25/11/2015) Procedimiento para el control de un manipulador, especialmente de un robot, con el paso:
registro de una fuerza de contacto entre el manipulador y una pieza de trabajo en base a fuerzas de accionamiento reales (π) y fuerzas de accionamiento (πModelo) de un modelo dinámico (M d2q/dt2 + h(q, dq/dt) ≥ πModelo) del manipulador que describe la relación entre magnitudes cinemáticas y fuerzas de accionamiento;
caracterizado por el paso: ensamblaje de una pieza de trabajo bajo regulación flexible (S130; S230), supervisándose un estado de ensamblaje de la pieza de trabajo ensamblada bajo deformación elástica o plástica en base a…
Procedimiento y dispositivo para regular un manipulador.
(30/09/2013) Procedimiento para regular un manipulador de múltiples ejes, en particular un robot , que comprende lospasos de:
regulación flexible (S50) de al menos un eje guía; y
regulación rígida (S50) de al menos otro eje;
caracterizado porque
se determina un valor teórico (q2s, q5s) del al menos otro eje en base a un valor real (q3mess) del eje guía y sepredetermina una fuerza (Fmax) ante la que el manipulador debe ceder de forma flexible y/o una línea de acción(s + λk) a lo largo de la cual debe desviarse el manipulador de modo flexible, particularmente en el espacio detrabajo; y opcionalmente se conmuta entre una regulación flexible y una regulación…
PROCEDIMIENTO Y DISPOSITIVO PARA CONTROLAR UNA PLURALIDAD DE MANIPULADORES.
(08/09/2011) Procedimiento para controlar una pluralidad de manipuladores, con cierto número de unidades de mando que están asignadas a los manipuladores de modo que cada unidad de mando controla como mínimo un manipulador, procedimiento en el que un aparato de control accede a varias unidades de mando para el control de los manipuladores; procedimiento en el que el aparato de control genera señales de mando relevantes para el movimiento directamente adecuadas para un control del movimiento de los manipuladores en cuestión; procedimiento en el que mediante el aparato de control se presenta una interfaz de usuario de una unidad de mando de un manipulador seleccionado, caracterizado porque los datos de contenido de imagen y las señales de mando generadas por el aparato de control se transmiten por canales diferentes, estando el funcionamiento…
MÉTODO Y SISTEMA DE CONTROL PARA CONTROLAR UNA PLURALIDAD DE ROBOTS.
(16/06/2011) Método para controlar un sistema de una pluralidad de robots, comprendiendo dicho sistema: una pluralidad de controladores, que tienen cada uno de ellos un sistema de movimiento asociado que controla robots vinculados y que reciben instrucciones de movimiento desde por lo menos una fuente de instrucciones de movimiento, y una red de ordenadores a través de la cual se comunican dichos controladores; caracterizado porque un programa de control define y ejecuta instrucciones de movimiento coordinadas en el tiempo, estando asociada a una etiqueta exclusiva cada una de estas instrucciones de movimiento coordinadas en el tiempo, de tal manera que se comunica información…
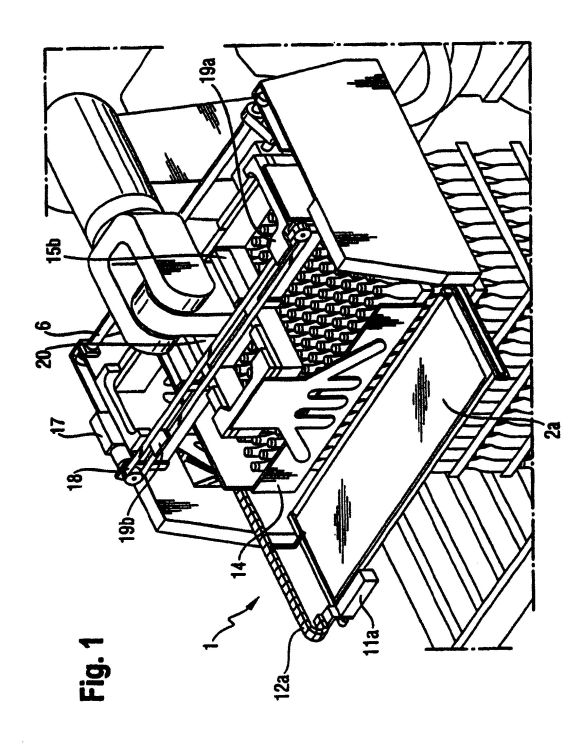
PROCEDIMIENTO Y DISPOSITIVO PARA LA TOMA Y TRANSPOSICIÓN DE HACES.
(16/05/2011) Dispositivo para la toma de haces con una base de soporte (3a, 3b) para los haces y con un lado anterior al menos parcialmente abierto para la recogida de los haces, con un empujador que está unido de forma tal que es móvil para así desplazar los haces en una dirección de toma horizontal a través del lado anterior abierto para dejarlos depositados sobre una base de soporte; caracterizado por el hecho de que encima de la base de soporte están previstos para el posicionamiento de los haces sobre la base de soporte sendos elementos de posicionamiento (15a, 15b) que son desplazables y se extienden a lo largo de ambos límites laterales de la base de soporte, de…
POSICIONADOR DE PIEZAS DE TRABAJO.
(01/02/2011) Posicionador de piezas de trabajo con uno o varios ejes de posicionamiento de rotación y/o de traslación (35 a 39) para el posicionamiento de una o varias piezas de trabajo , en el que el posicionador de piezas de trabajo presenta un bastidor de máquina configurado de forma modular, que está constituido por una o varias partes de bastidor y en el que están dispuestos uno o varios soportes de piezas de trabajo , en el que los soportes de piezas de trabajo y la pieza de trabajo retenida se pueden llevar a una posición deseada a través de un movimiento alrededor o a lo largo de al menos un eje de posicionamiento (35 a 39), en el que - al menos una parte de bastidor presenta uno o varios módulos de bastidor , - un módulo de bastidor presenta al menos un elemento de soporte longitudinal y al menos…
PROCEDIMIENTO Y DISPOSITIVO PARA EL CONTROL DE MANIPULADORES.
(30/11/2010) Procedimiento para el control de una pluralidad de manipuladores tales como robots industriales multiaxiales, donde: a) un manipulador es llevado a una cantidad de poses preestablecidas dentro de su espacio de trabajo y para la determinación de valores posicionales internos del manipulador es llevado a las mismas en calidad de primeras poses teóricas (P2); caracterizado por el hecho de que al menos uno de los manipuladores actúa como manipulador de referencia y al menos otro actúa como manipulador copiador , siendo el paso a) realizado por el manipulador de referencia ; b) para cada pose teórica (P2) del paso a) es determinada mediante un sistema de medición externo una correspondiente pose del manipulador…
(26/05/2010) Rueda con un cuerpo de rueda accionado, que presenta dos elementos de soporte, entre los que están dispuestos tal que pueden girar un cierto número de cuerpos de rodadura con una superficie abombada, que al menos en parte sobresalen más allá del perímetro de los elementos de soporte y cuyos ejes de giro están orientados oblicuos respecto al eje de giro del cuerpo de la rueda,
caracterizada porque la relación entre el diámetro exterior (Du) de la rueda y el radio máximo (Ra) de los cuerpos de rodadura es de entre 1,08 y 1,13, en particular entre 1,09 y 1,1
PROCEDIMIENTO DE INTERCAMBIO DE DATOS ENTRE SISTEMAS DE MANDO DE MAQUINAS, Y EN PARTICULAR DE ROBOTS.
(04/05/2010) Procedimiento de intercambio de datos entre sistemas de mando de máquinas, y en particular de robots, donde un primer sistema de mando genera una instrucción a transmitir con datos a enviar a un segundo sistema de mando y con una identificación que representa a este segundo sistema de mando, se dota a la instrucción a transmitir de una identificación del primer sistema de mando y el primer sistema de mando envía la instrucción a transmitir al segundo sistema de mando, y donde el segundo sistema de mando evalúa los datos de la instrucción y el segundo sistema de mando le da una comunicación de retorno al primer sistema de mando,…
PROCEDIMIENTO Y DISPOSITIVO PARA LA DESPALETIZACION DE EMBALAJES SECUNDARIOS APILADOS.
Sección de la CIP Técnicas industriales diversas y transportes
(27/07/2009). Ver ilustración. Inventor/es: BAUMANN, MICHAEL, FELLNER,HERBERT. Clasificación: B65G59/02.
Procedimiento de despaletización de embalajes secundarios apilados, donde los embalajes secundarios son levantados mediante adherencia por rozamiento y se introduce bajo los mismos al menos un asiento de soporte; caracterizado por el hecho de que los embalajes secundarios son levantados por dos lados mútuamente opuestos, y de que por dos lados mútuamente opuestos se introducen bajo los embalajes secundarios levantados dos asientos de soporte.
SISTEMA DE CONTROL DE ACCESO EXCLUSIVO DE PROGRAMAS DE CONTROL A LOS RECURSOS DEL SISTEMA.
(16/12/2008) Sistema que comprende: una pluralidad de nodos accesibles que representan los ubicaciones; un sistema de comunicaciones que conecta los nodos accesibles y que transmite las comunicaciones entre los nodos accesibles. una pluralidad de máquinas o procesos, estando situados las máquinas o procesos en al menos uno de los nodos accesibles; una pluralidad de programas de control que usan los recursos e incluyen una pluralidad de programas de control de máquinas o procesos, controlando cada programa de control de máquinas o procesos al menos una máquina o proceso; y caracterizado por una pluralidad de gestores de recursos, estando situados los gestores de recursos en una pluralidad de nodos accesibles, comunicándose cada gestor de recursos sobre el sistema de comunicaciones…
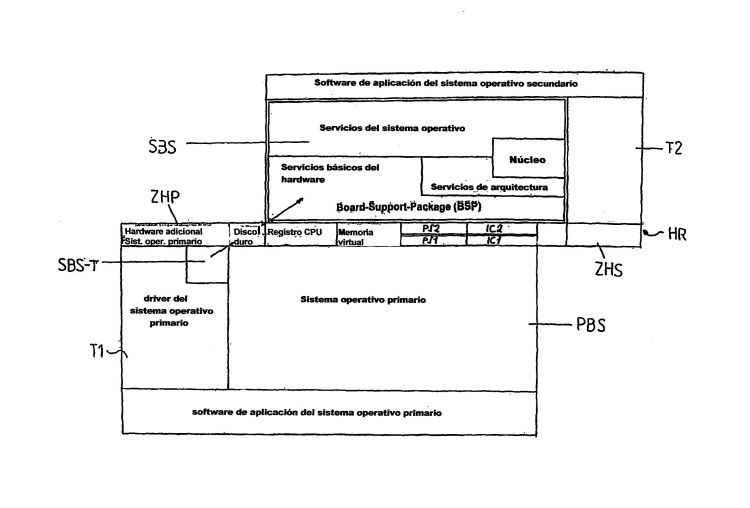
PROCEDIMIENTO Y DISPOSITIVO PARA EJECUTAR UN SISTEMA OPERATIVO SECUNDARIO JUNTO A UN SISTEMA OPERATIVO PRIMARIO.
Sección de la CIP Física
(01/08/2008). Ver ilustración. Inventor/es: GROSCHEL,ANDREAS, EHRLINSPIEL,JORG, ZINTGRAF,STEFAN. Clasificación: G06F9/445, G06F9/455.
Procedimiento para ejecutar (implementar) un sistema operativo secundario en un procesador junto a un sistema operativo primario, con un cambio de sistema operativo primario a sistema operativo secundario causado por una solicitud de interrupción (Interrupt), caracterizado porque para cargar y controlar el sistema operativo secundario se carga y activa un driver del sistema operativo secundario (driver SBS) del sistema operativo primario, porque con una solicitud de interrupción se produce un cambio de las tablas de interrupción de los sistemas operativos y porque el driver del sistema operativo secundario determina mediante una rutina de tratamiento de la solicitud de interrupción la información almacenada en la tabla de interrupciones del sistema operativo secundario, en el lugar en el que tiene que producirse en el sistema operativo secundario la ejecución de la solicitud de interrupción.
ROBOT CON ANILLOS DE SOPORTE FIJADOS SOBRE UNA CAJA DE ENGRANAJES PARA FIJACION DE LEVAS DE CONTROL.
Sección de la CIP Técnicas industriales diversas y transportes
(16/06/2007). Inventor/es: KARLINGER, STEFAN. Clasificación: B25J9/10, B25J17/02.
Robot de varios ejes con al menos un engranaje asociado a un eje del robot, con una caja de engranajes con bandas de retención para fijar levas de control para controlar el ángulo de giro del eje del robot, caracterizado porque las bandas de retención están configuradas esencialmente en forma de arco de circunferencia con un perímetro interior aproximadamente equivalente al perímetro exterior de la caja del engranajes , y porque las bandas de retención se pueden tensar entre sí por el lado frontal para su fijación a la caja de engranajes.
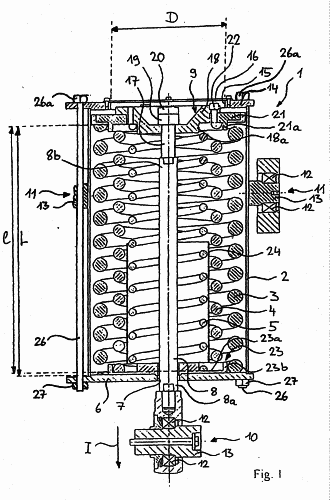
DISPOSITIVO PARA COMPENSAR EL PESO DE UN BRAZO DE ROBOT.
Sección de la CIP Técnicas industriales diversas y transportes
(01/11/2006). Ver ilustración. Inventor/es: BAYER, ALBERT, BOHLKEN, WOLFGANG, BERNINGER, ALWIN. Clasificación: B25J19/00.
Dispositivo para compensar el peso del brazo de un robot, con un cilindro de resortes con al menos dos resortes helicoidales, teniendo el lado frontal del cilindro alejado del lado de salida del émbolo una perforación que puede cerrarse, caracterizado por un plato interior unido a un vástago de émbolo del cilindro de resortes, que actúa como apoyo para como mínimo un resorte helicoidal intercambiable del cilindro de resortes y cuyas dimensiones exteriores son menores que las dimensiones de la perforación para colocar y retirar fácilmente como mínimo un resorte helicoidal intercambiable.
MANIPULADOR DE VARIOS EJES.
Sección de la CIP Técnicas industriales diversas y transportes
(01/08/1996). Inventor/es: ZIMMER, ERNST. Clasificación: B25J19/00, B25J9/10, B25J9/00, B25J9/04.
LA INVENCION SE REFIERE A UN MANIPULADOR DE VARIOS EJES, CON UN BASTIDOR Y UN PLATO HORIZONTAL ACCIONADO Y DISPUESTO SOBRE EL MISMO EN TORNO A UN EJE BASICO GIRATORIO . EL BASTIDOR PRESENTA UNA COLUMNA DE APOYO CENTRAL, CONCEBIDA COMO APOYO DEL PAR Y DEL RODAMIENTO DEL PLATO HORIZONTAL . EL ACCIONAMIENTO PARA EL PLATO HORIZONTAL SE HA DISPUESTO ESENCIALMENTE A LA ALTURA O ENCIMA DE LA PLACA BASE DEL PLATO HORIZONTAL , EN EL QUE EL MOTOR ESTA SITUADO SOBRE EL PLATO HORIZONTAL , Y LA PARTE DEL ACCIONAMIENTO DE LA TRANSMISION , ESTA DISPUESTA A LA ALTURA O ENCIMA DE LA PLACA BASE DEL PLATO HORIZONTAL . CON ESTA ESTRUCTURA, LAS PARTES DEL ACCIONAMIENTO PARA EL PLATO HORIZONTAL SON MAS ACCESIBLES PARA FINES DE MONTAJE Y DE MANTENIMIENTO, POR LO QUE SE OBTIENE TAMBIEN PARA EL RODAMIENTO UN ANCHO DE APOYO RELATIVAMENTE REDUCIDO Y CON ELLO UN AHORRO DE ESPACIO.
{kind=link}
{kind=link}
{kind=link}