CIP-2021 : G05B 19/23 : para control punto por punto.
CIP-2021 › G › G05 › G05B › G05B 19/00 › G05B 19/23[5] › para control punto por punto.
G FISICA.
G05 CONTROL; REGULACION.
G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K).
G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00).
G05B 19/23 · · · · · para control punto por punto.
CIP2021: Invenciones publicadas en esta sección.
PROCEDIMIENTO Y DISPOSITIVO PARA MANIOBRAR UN ACCIONAMIENTO DE PUERTA.
(01/05/2007). Solicitante/s: SOMMER ANTRIEBS- UND FUNKTECHNIK GMBH. Inventor/es: SOMMER, FRANK.
Procedimiento para maniobrar un accionamiento de puerta eléctrico que comprende los siguientes pasos de procedimiento: - Determinación del desarrollo en el tiempo de los momentos de giro del accionamiento de puerta durante un proceso de aprendizaje para en cada caso al menos un proceso de apertura y de cierre, - Deducción de los momentos de giro máximos admisibles a partir de los momentos de giro calculados para zonas predeterminadas dentro de un proceso de apertura y de cierre, - Comparación de los momentos de giro actuales con los momentos de giro máximos y comparación de las velocidades actuales del accionamiento de puerta con velocidades nominales predeterminadas durante el funcionamiento del accionamiento de puerta, - Aumento de la velocidad actual del accionamiento de puerta al quedar por debajo de la velocidad nominal asignada, - Desconexión del accionamiento de puerta, en caso de que el momento de giro actual sobrepase el momento de giro máximo asignado.
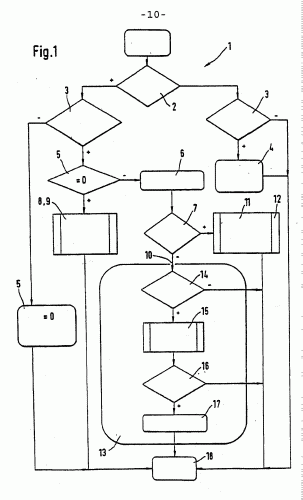
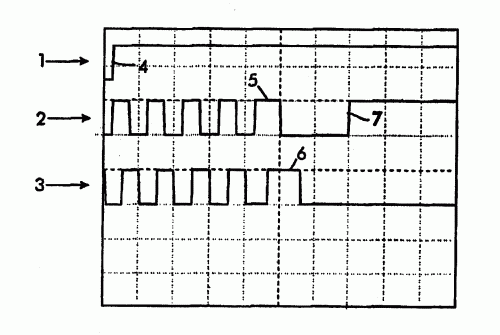
PROCEDIMIENTO PARA DETERMINAR EL TIEMPO REMANENTE DE FUNCIONAMIENTO DE UN ACCIONAMIENTO.
(01/03/2007). Ver ilustración. Solicitante/s: ROBERT BOSCH GMBH. Inventor/es: KAHLES, PATRIC.
Procedimiento para determinar el tiempo remanente de funcionamiento de un accionamiento hasta alcanzar un tope, pudiéndose desplazar mediante el accionamiento las superficies a cerrar a posiciones finales mecánicas, caracterizado porque después de detectar la posición de las superficie a cerrar con relación a un tope mecánico se establece la diferencia de tiempo entre dos impulsos de transmisor incremental en las proximidades del tope mecánico, y se calcula el tiempo remanente de funcionamiento del accionamiento eléctrico que queda hasta alcanzar el tope mecánico y, una vez transcurrido el tiempo remanente de funcionamiento calculado, se detiene el motor de accionamiento del sistema de cierre.
PROCEDIMIENTO DE GOBIERNO DE LA DEPOSICION DE MECHAS POR ENROLLAMIENTO O EN CONTACTO SOBRE ESTRUCTURAS DE GRANDES DIMENSIONES Y MAQUINA PARA LA PUESTA EN MARCHA DEL PROCEDIMIENTO.
(16/01/2005) LA INVENCION SE REFIERE A UN PROCEDIMIENTO DE CONTROL DE INSTALACION DE BROCAS POR ENROLLAMIENTO O POR CONTACTO EN ESTRUCTURAS DE GRANDES DIMENSIONES Y A UNA MAQUINA PARA SU PUESTA EN PRACTICA. EL PROCEDIMIENTO EN EL QUE SE EFECTUA LA INSTALACION EN UN MANDRIL ARRASTRADO EN ROTACION ALREDEDOR DE SU EJE ( ZE ), MEDIANTE UNA CABEZA DE INSTALACION APROPIADA, AJUSTABLE EN POSICION SEGUN AL MENOS UN PRIMER EJE DE DESPLAZAMIENTO RECTILINEO (X) PARALELO AL EJE DE ROTACION ( ZE ) DEL MANDRIL Y UN SEGUNDO EJE DE DESPLAZAMIENTO RECTILINEO (Y) ORTOGONAL A DICHO EJE DEL MANDRIL, SE CARACTERIZA PORQUE CONSISTE EN: TOMAR COMO EJE MAESTRO EL EJE DE ROTACION ( ZE ) DEL MANDRIL Y SOMETER LOS OTROS EJES (X, Y, BE , GA , 8, 9) A DICHO EJE MAESTRO, EN CONTROLAR EL EJE MAESTRO ( ZE ) POR REFERENCIAS DE VELOCIDAD SEGUN UN PROGRAMA PREESTABLECIDO, Y A PARTIR DE UNA TABLA…
SISTEMA Y PROCEDIMIENTO PARA EL CONTROL DE UN DISPOSITIVO DE POSICIONAMIENTO, SOBRE TODO DE LOS MECANISMOS DE ACCIONAMIENTO REGULADOR EN LAS MAQUINAS HERRAMIENTAS ASI COMO DISPOSITIVO DE INTERFERENCIA DE FASES.
(01/09/2004) Sistema para el control de un dispositivo de posicionamiento sobre todo de los mecanismos de accionamiento regulador en las máquinas herramienta, con: - Un dispositivo de medición incremencial de posicionamiento con las señales de salida en la forma de sin cp1, sin (co1 ± p) representando p, en este caso, un ángulo por el cual se encuentran desplazadas entre si las fases de dos señales de salida; - Una unidad de control, que convierte las señales de salida en unas señales de mando y la que, de esta manera, controla el dispositivo de posicionamiento; así como con: - Unos medios para la interferencia de un ángulo de corrección cp2 en las señales de salida; a este efecto, estos medios se encuentran conectados de tal modo entre el dispositivo…
REGISTRO DE LA MARCHA EN ENERCIA DE SERVOMOTORES ELECTRICOS CON REGISTRO DE POSICION INCREMENTAL.
(01/01/2004). Ver ilustración. Solicitante/s: ROBERT BOSCH GMBH. Inventor/es: KAHLES, PATRIC, HEIB, JOHANNES.
LA INVENCION SE REFIERE A UNA SERIE PARA DETECCION DE SEGUIMIENTO DE MOTORES ELECTRICOS DE CONTROL CON DETECCION DE LA POSICION INCREMENTAL, ESPECIALMENTE PARA AJUSTAR MOTORES DE VEHICULOS DE MOTOR, EN CUYA EVALUACION SE PROPORCIONA UNA INSTALACION ELECTRONICA QUE DETERMINA LAS SEÑALES DE POSICION (2, 39 PROCEDENTES DE TRANSMISORES DE POSICION. EL ESTADO DETERMINADO DE LAS SEÑALES DE POSICION O DEL ESTADO DE LOS TRANSMISORES DE POSICION SE ALMACENAN EN UNA MEMORIA NO VOLATIL DESPUES DE DESCONECTAR EL MOTOR. LA ELECTRONICA DE EVALUACION PUEDE DESCONECTARSE PARCIALMENTE DE LA TENSION DE DISTRIBUCION. DICHA ELECTRONICA DE EVALUACION VA DOTADA DE UNA ACCION TAMPON, SUFICIENTEMENTE AMPLIA A FIN DE PERMITIR LA DETECCION DE LA POSICION Y EL ALMACENAMIENTO DESPUES DE DESCONECTADA LA ELECTRONICA DE EVALUACION DE LA TENSION DE DISTRIBUCION. LA MEMORIA NO VOLATIL PUEDE SER UNA EEPROM INCLUIDA EN EL MICROCONTROLADOR DE LA ELECTRONICA DE EVALUACION.
PROCEDIMIENTO PARA EL FUNCIONAMIENTO DE UN SENSOR DE POSICION.
(16/12/2003) SE PROPONE UN PROCEDIMIENTO PARA EL FUNCIONAMIENTO DE UN SENSOR DE POSICION A PARTIR DE AL MENOS DOS PIEZAS QUE SE PUEDEN MOVER UNA RESPECTO A OTRA. LA PRIMERA PIEZA DEL SENSOR DE POSICION MUESTRA AL MENOS DOS SECCIONES MAGNETIZADAS (28A, 28B) EN DIFERENTES DIRECCIONES Y LA SEGUNDA PIEZA AL MENOS UN SENSOR DE CAMPO MAGNETICO QUE REGISTRE EL CAMPO MAGNETICO DE LA PRIMERA PIEZA Y LO TRANSFORME EN SEÑALES CON DOS NIVELES, DEPENDIENDO DEL SIGNO DE LOS COMPONENTES DEL CAMPO MAGNETICO, EN UN SENTIDO DE ESPACIO FIJADO. LOS NIVELES SON CONDUCIDOS A UN SISTEMA QUE PROCESA LA SEÑAL, DESDE EL CUAL SE EVALUAN PARA DETERMINAR LA POSICION RELATIVA DE LA PRIMERA PIEZA CON RESPECTO A LA SEGUNDA . DE ACUERDO CON EL PROCEDIMIENTO SEGUN LA INVENCION, ANTES DE LA PARADA DE AL MENOS UN SENSOR DE CAMPO…
SISTEMA DE CONTROL ELECTRONICO CON AJUSTE MEDIANTE CONTROL REMOTO POR RADIO DE LIMITADORES DE FIN DE CARRERA PARA MOTORES DE ACCIONAMIENTO DE DISPOSITIVOS DE ENROLLAMIENTO, TALES COMO TOLDOS ENROLLABLES, PERSIANAS ENROLLABLES, COMPUERTAS CON RODILLOS Y SIMILARES.
(16/11/2002) SISTEMA DE CONTROL ELECTRONICO PARA MOTORES PARA EL ACCIONAMIENTO DE DISPOSITIVOS ENROLLABLES, TALES COMO PERSIANAS ENROLLABLES, PUERTAS ENROLLABLES Y SIMILARES, QUE COMPRENDE UN RECEPTOR DE RADIO INCLUIDO EN EL MOTOR QUE ES CONTROLADO Y UN TRANSMISOR DE RADIO PORTATIL A DISPOSICION DEL USUARIO. EL TRANSMISOR DE RADIO COMPRENDE AL MENOS DOS BOTONES PULSADORES PARA EL CONTROL DEL MOVIMIENTO DE LEVANTAMIENTO Y DESCENSO DEL DISPOSITIVO ENROLLABLE Y UN PRIMER MICROCONTROLADOR DOTADO DE UNA PRIMERA MEMORIA CODIFICADA QUE, AL PULSAR AL MENOS UNO DE LOS BOTONES PULSADORES ENVIA UNA SEÑAL CODIFICADA QUE TIENE UN…
PROCEDIMIENTO DE CORRECCION ENTRE EL ANGULO DE FASE ELECTRICO Y EL ANGULO DE SALIDA MECANICO DE UN MOTOR PASO A PASO.
(01/02/1999). Solicitante/s: ROBERT BOSCH GMBH. Inventor/es: HERZOG, BERNHARD DR., RAUCH, HANS, HOVESTADT, UWE, EHRMANN, MARTIN.
SE DESCRIBE UN PROCEDIMIENTO PARA LA CORRECCION DE UNA RELACION NO LINEAL ENTRE EL ANGULO DE FASE ELECTRICO Y EL ANGULO DE ACCIONAMIENTO MECANICO DE UN MOTOR PASO A PASO MEDIANTE LA UTILIZACION DE UN DECODIFICADOR DE BAJA RESOLUCION O SIMILAR. EL PROCEDIMIENTO REPRESENTA UN COMPROMISO ENTRE LA REGULACION CLASICA DE LOS MOTORES PASO A PASO, QUE REQUIERE UNA ALTA RESOLUCION DE DETECCION DE ANGULO Y UNA CORRECCION PURAMENTE ESTADISTICA DE LA CURVA CARACTERISTICA. EL RESULTADO ES UNA MEJORA DE SINCRONISMO SUSTANCIAL, POR EJEMPLO CUANDO LOS MOTORES PASO A PASO DE POLO DE GARRA CONVENCIONAL SON UTILIZADOS PARA ACCIONAMIENTO DE UN INDICADOR O DE UN AVISADOR EN UN VEHICULO A MOTOR. EL CONTROL DE MICROPASO SE REALIZA CON UNA FORMA DE ONDA SINUSOIDAL CORREGIDA. LOS COEFICIENTES EVALUADOS MEDIANTE SINTESIS DE FOURIER SIMPLIFICADA SON UTILIZADO ESENCIALMENTE PARA CORREGIR LA FORMA DE ONDA SINUSOIDAL.
METODO Y APARATO PARA CONTROLAR EL DESPLAZAMIENTO DE COORDENADAS EN UNA PLATAFORMA.
(16/10/1997) EL CAMPO DE LA INVENCION ES UNA COMBINACION DE UN MICROSCOPIO Y UN SISTEMA DE ANALISIS DE IMAGENES INTERACTIVO QUE COMPRENDE UNA CAMARA Y UNA ESTACION DE TRABAJO POR ORDENADOR. EL PROPOSITO DE LA INVENCION ES FACILITAR EL CONTROL INTERACTIVO DE LOS DESPLAZAMIENTOS DE COORDENADAS DE LA ETAPA DEL MICROSCOPIO. PARA CADA COORDENADA X E Y SE ESTABLECE UN CANAL DE CONTROL ELECTROMECANICO. EN LA ENTRADA DEL CANAL DE CONTROL SE USAN DOS RUEDAS EN CASCADA EN UNA DISPOSICION COAXIAL Y DOS CODIFICADORES DE ANGULOS COMO HERRAMIENTA INDEPENDIENTE QUE NO SE ENCUENTRA CINEMATICAMENTE UNIDA A LA ETAPA. EN LA MITAD DEL CANAL DE CONTROL, LOS IMPULSOS DE LOS CODIFICADORES DE ANGULOS SUFREN UNA TRANSFORMACION NO LINEAL. UN PROCESADOR REALIZA LOS CALCULOS QUE DISCRIMINAN ENTRE DESPLAZAMIENTOS…
PROCESO Y DISPOSITIVO PARA DESPLAZAR UN ELEMENTO DE OCULTACION HASTA POSICIONES ESTABLES AJUSTABLES E INSTALACION QUE LO APLICAN.
(16/05/1995). Solicitante/s: SOCIETE ANONYME SIMU. Inventor/es: NICLAS, HENRI, VIVIANT, JEAN-MARC.
ACCIONAMIENTO DE UN ELEMENTO DE OCULTACION. EL PROCESO DE ACCIONAMIENTO SEGUN LA INVENCION SE COMPONE DE LAS SIGUIENTES ETAPAS: GRABAR CONSTANTEMENTE EN UNA MEMORIA (MR) LLAMADA DE POSICION REAL, LA POSICION OCUPADA POR EL ORGANO MOTOR , GRABAR EL VALOR DE LA MEMORIA (MR) DE POSICION REAL EN UNA PRIMERA (M ELEVADO 1) O EN UNA SEGUNDA (M (AL CUADRADO) ) MEMORIA, QUE CORRESPONDE RESPECTIVAMENTE A LA PRIMERA O A LA SEGUNDA POSICION EXTREMA DEL ELEMENTO DE OCULTACION, EN EL MOMENTO DE LA EMISION DE UNA ORDEN DE MEMORIZACION, Y ACCIONAR LA ROTACION DEL ORGANO MOTOR EN RELACION DE LAS ORDENES RECIBIDAS Y QUE CORRESPONDE, BIEN A UNA ORDEN DESTINADA A DESPLAZAR EL ELEMENTO DE OCULTACION PARA ALCANZAR SU PRIMERA POSICION EXTREMA, BIEN A UNA ORDEN DESTINADA A DESPLAZAR EL ELEMENTO DE OCULTACION, PARA ALCANZAR SU SEGUNDA POSICION EXTREMA.
CONTROLADOR DE MOTOR SERVO DE VELOCIDAD DE MUESTREO HIBRIDO.
(01/02/1995). Solicitante/s: HEWLETT-PACKARD COMPANY. Inventor/es: STEWART, LOWELL JAMES, MEBANE, ALFRED HOLT, IV.
SE SE DESCUBRE UN MOTOR SERVO DE VELOCIDAD DE MUESTREO HIBRIDO QUE UTILIZA UNA COMPENSACION DE REALIMENTACION DE VELOCIDAD. EL SISTEMA UTILIZA UN CODIFICADOR DE EJE QUE TIENE UNA RESOLUCION PREDETERMINADA PARA PROPORCIONA DATOS DE LA POSICION QUE SON IMPULSOS QUE INDICAN QUE EL JEFE HA MOVIDO OTRA UNIDAD DE RESOLUCION. EN CONDICIONES DE ALTA VELOCIDAD DEL MOTOR, EL BUCLE DE REALIMENTACION DE COMPENSACION DE VELOCIDAD SE ACCIONA A UNA VELOCIDAD DE MUESTREO CONVENCIONAL CONSTANTE. EN CONDICIONES DE BAJA VELOCIDAD, LA VELOCIDAD DE MUESTREO A LA QUE SE ACCIONA EL BUCLE DE REALIMENTACION DE COMPENSACION DE VELOCIDAD SE MODIFICA DE FORMA QUE SE TOMAN Y SE CALCULAN MUESTREOS DE VELOCIDAD SOLO CUANDO SE DISPONE DE DATOS DE LA NUEVA POSICION DEL CODIFICADOR DEL MOTOR. EL ERROR DE CUANTIFICACION SE REDUCE SUSTANCIALMENT, LLEVANDO CON ELLO A UN FUNCIONAMIENTO MAS RESISTENTE DEL CONTROLADOR.
APARATO PARA POSICIONAR DE MANERA PRECISA.
(01/03/1993). Solicitante/s: ROGOZINSKI, JOSEPH COHEN, ILAN. Inventor/es: ROGOZINSKI, JOSEPH, COHEN, ILAN.
EL APARATO CONSTA DE APARATOS DE ARRASTRE ACOPLADO A UNA CARGA , DE UN APARATO SENSOR PARA LA MEDIDA AL MENOS DE UNA DE LAS MAGNITUDES DE POSICION (P), VELOCIDAD (V) Y ACELERACION (A) QUE ESTA ACOPLADO AL PRIMERO , DE UN APARATO PARA DETERMINAR LA POTENCIA DE ENTRADA (I) PARA EL PRIMERO , DE UN APARATO DE CONTROL PARA COMPENSAR LA INEXACTITUD QUE RECIBE UNA PRIMERA ENTRADA DEL APARATO SENSOR Y UNA SEGUNDA ENTRADA DEL APARATO QUE DETERMINAR LA POTENCIA DE ENTRADA (I) Y ASI PROPORCIONAR UNA INDICE DE SALIDA COMPENSADA QUE MUESTRA AL MENOS UNA DE LAS MAGNITUDES DE POSICION (P), VELOCIDAD (V), FUERZA (F) Y ACELERACION (A) DE UNA CARGA SOBRE LA BASE DE LA INFORMACION QUE CONSIDERA LAS NO LINEALIDADES ENTRE EL APARATO DE ARRASTRE Y LA CARGA INCLUYENDO INFORMACION DE SI LA CARGA ESTA ARRASTRANDO AL APARATO DE ARRASTRE O ESTE ARRASTRA A LA CARGA.
PERFECCIONAMIENTOS EN LAS INSTALACIONES DE CONTROL Y MEDICION DE DESPLAZAMIENTOS DE UN ORGANO MECANICO.
(01/11/1985). Solicitante/s: A.C.A. ELECTRONIC DI ARMANDO PICONE & C. S.N.C.
PERFECCIONAMIENTOS EN LAS INSTALACIONES DE CONTROL Y MEDICION DE DESPLAZAMIENTO DE UN ORGANO MECANICO.CONSISTENTES EN UN GRUPO DE MOTOR; UN PRIMER ENGRANAJE DE MANDO SOLIDARIO DE UN ARBOL DE SALIDA DEL GRUPO MOTOR; UN SEGUNDO ENGRANAJE ACCIONADO; Y ELEMENTOS DE TRANSMISION DEL MOVIMIENTO QUE COOPERAN CON LOS ENGRANAJES QUE SOPORTAN LOS ORGANOS DE MAQUINAS HERRAMIENTAS BAJO CONTROL; DONDE LOS MEDIOS DE TRANSMISION COMPRENDEN UNA LAMINA DE ACERO QUE PRESENTA UNA PLURALIDAD DE ORIFICIOS DISTRIBUIDOS SOBRE LA LAMINA A UNA DISTANCIA PREFIJADA RECIRPOCA COMPRENDIENDO UN TRANSDUCTOR ROTATIVO SOLIDARIO EN ROTACION AL ENGRANAJE DE MANDO Y APTO PARA PROPORCIONAR A LA SALIDA SEN/ALES ELECTRICAS CORRESPONDIENTES A LA ROTACION DEL ENGRANAJE.
PERFECCIONAMIENTOS EN DISPOSITIVOS DE CONTROL NUMERICO PARA REGULAR LA ROTACION DE UN SERVOMOTOR CONECTADO A TRAVES DE UN HUSILLO DE ALIMENTACION A UN ORGANO MOVIL.
(16/12/1981). Solicitante/s: TOYODA-KOKI KABUSHIKI-KAISHA.
DISPOSITIVO DE CONTROL NUMERICO PARA REGULAR LA VELOCIDAD DE ROTACION DE UN SERVOMOTOR UNIDO A TRAVES DE UN HUSILLO A UN ORGANO MOVIL.EL DISPOSITIVO CONSTA DE UN MICROORDENADOR QUE ENVIA, A UN GENERADOR DE IMPULSOS , LAS SEÑALES DE REGIMEN Y TENDION DE ALIMENTACION ORDENADOS. EL GENERADOR ENVIA UN TREN DE IMPULSOS A UN CONTADOR DIFERENCIAL QUE CALCULA LA DIFERENCIA ENTRE ESTOS Y LOS REALIMENTADOS A TRAVES DE OTRO GENERADOR . LA DIFERENCIA SE INTRODUCE EN UN CONVERTIDOR DIGITAL ANALOGICO QUE GENERA UNA TENSION.
UN SISTEMA DE POSICIONAMIENTO QUE RESPONDE A UNA ORDEN DE ENTRADA DE POSICION PARA MOVER UN MIEMBRO A LO LARGO DE UNA TRAYECTORIA DE DESPLAZAMIENTO PREDETERMINADA.
(01/02/1979). Solicitante/s: INTERNATIONAL BUSINESS MACHINES CORPORATION.
Un sistema de posicionamiento que responde a una orden de entrada de posición para mover un miembro a lo largo de una trayectoria de desplazamiento predeterminada entre una posición corriente y una posición de referencia de blanco definida con respecto a dicha trayectoria de desplazamiento en un tiempo mínimo compatible con limitaciones de rendimiento en el sistema, comprendiendo dicho sistema: un accionador eléctricamente operado para mover dicho miembro a lo largo de dicha trayectoria predeterminada en respuesta a señales de excitación eléctricas y que tiene un circuito de entrada al que se aplican dichas señales y medios de control de alimentación directa para proporcionar una señal de excitación predictiva variable con el tiempo a dicho circuito de entrada del accionador para efectuar un control aproximado de dicho movimiento.
PERFECCIONAMIENTOS EN DISPOSITIVOS INDICADORES PARA DIRIGIR UN DEPOSITO GIRATORIO PROVISTO DE UNA PLURALIDAD DE DISPOSITIVOS PORTAHERRAMIENTAS CLASIFICADOS EN ORDEN NUMERICO, A UNA POSICION DE CAMBIO DE HERRAMIENTA PREDETERMINADA.
(16/11/1978). Solicitante/s: TOYODA-KOKI KABUSHIKI-KAISHA.
Resumen no disponible.
DISPOSITIVO ELECTRONICO DE CONTROL DE POSICION Y DE ENCADENAMIENTO PARA GATOS HIDRAULICOS Y PARA MOTORES.
(16/05/1978). Solicitante/s: MISSIOUX,JEAN LEON.
Resumen no disponible.
{kind=link}
{kind=link}