CIP-2021 : F41G 7/34 : basados sobre datos de posiciones predeterminadas del blanco.
CIP-2021 › F › F41 › F41G › F41G 7/00 › F41G 7/34[1] › basados sobre datos de posiciones predeterminadas del blanco.
Notas[t] desde F41 hasta F42: ARMAMENTO; VOLADURA
F MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA.
F41 ARMAS.
F41G APARATOS DE MIRA; PUNTERIA (aspectos ópticos G02B).
F41G 7/00 Sistemas de control de la dirección para misiles autopropulsados (control de vuelos B64C, G05D 1/00; proyectiles autopropulsados o misiles con sistemas de control únicamente instalados a bordo F42B 15/01; torpedos-cohetes F42B 17/00; torpedos marinos o minas marinas con medios de propulsión autónomos F42B 19/00; localización del blanco mediante ondas de radio u de otro tipo G01S; bajo el aspecto calculador G06).
F41G 7/34 · basados sobre datos de posiciones predeterminadas del blanco.
CIP2021: Invenciones publicadas en esta sección.
Procedimiento para la optimación de la navegación automática asistida por imágenes de un misil no tripulado.
(14/06/2017) Procedimiento para la optimación de la navegación automática asistida por imágenes de un misil no tripulado con los pasos:
a) elaboración de un plan de misión que contiene datos de navegación de una ruta de vuelo planificada sobre la base de tomas por satélite o vistas aéreas por medio de un ordenador de planificación de misión, incluyendo los datos de navegación información sobre estructuras topológicas o topográficas seleccionadas;
b) carga del plan de misión en un ordenador de misión del misil no tripulado;
c) montaje del misil no tripulado en una aeronave portadora;
d) realización de la ruta de vuelo por medio de la aeronave portadora, utilizando la navegación del misil no tripulado los datos de navegación de la aeronave portadora;
…
Sistema de guiado de un proyectil.
(02/11/2016) Sistema de guiado de un proyectil equipado con al menos un accionador de pilotaje y que incluye medios de medición de parámetros físicos , un calculador de guiado y medios de control de dicho accionador de pilotaje , debiendo dicho proyectil seguir una trayectoria de referencia en los primeros instantes de vuelo e incluyendo dicho calculador de guiado :
- medios de navegación para determinar la actitud y la posición del proyectil en vuelo;
- medios de guiado para elaborar órdenes de guiado a partir de la actitud, de la posición y de la posición del objetivo determinadas por dichos medios de navegación ; y
- medios de pilotaje para establecer órdenes de control, destinadas a dichos medios de control , a partir de dichas órdenes de guiado,
caracterizado por que dicho calculador de guiado incluye, además, medios…
(12/10/2016) Misil no tripulado, especialmente misil de crucero, con
- un cuerpo que recibe una carga útil;
- superficies de control , que están colocadas móviles en el cuerpo por medio de accionamientos de superficies de control;
- una instalación de accionamiento para el misil y
- un ordenador de a bordo , que presenta una memoria de datos de la misión y un ordenador de control , que impulsa los accionamientos de superficies de control con señales de control;
- una instalación de comunicaciones por satélite , que está conectada eléctricamente con el ordenador de a bordo para el intercambio de datos, y
- antenas…
Procedimiento para el apoyo de la navegación inercial de un aparato volador.
(30/03/2016) Procedimiento para el apoyo de la navegación inercial de un aparato volador (FK) con un sistema de navegación inercial (INS) que presenta una unidad de medición de la inercia (IMU) y con una cámara que mira hacia delante para la captación continua de una serie de imágenes de un escenario sobrevolado por el aparato volador (FK), proporcionando la serie de imágenes captadas de forma continua datos para una comparación de los datos, que apoya la navegación inercial, con los datos de referencia archivados en el aparato volador (FK), captando la cámara imágenes desde distintas perspectivas del escenario sobrevolado y caracterizándose la posición y la situación de la cámara respecto a un sistema de coordenadas en el momento de una primera toma en la posición 1 por medio de una matriz de rotación y de un vector de traslación, y caracterizándose…
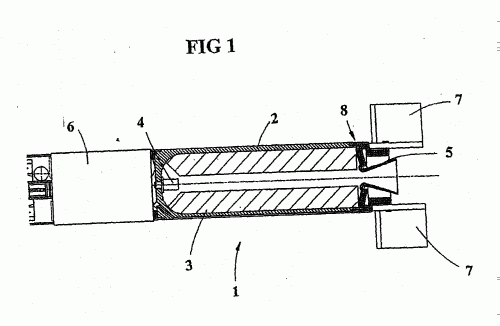
CONTROL DE ALCANCE DE UN PROYECTIL PROPUYLSADO POR COHETE.
(16/06/2004). Ver ilustración. Solicitante/s: SAAB DYNAMICS AKTIEBOLAG. Inventor/es: KOMSTADIUS, SVEN.
Procedimiento para controlar el alcance de un proyectil propulsado por un motor de cohete, en el cual un valor real de una cantidad, que se correlaciona claramente con la distancia cubierta por el proyectil, se determina de forma continua durante la propulsión, el valor real determinado de esta forma se compara de forma continua con un valor establecido predefinido, caracterizado porque el valor establecido se corresponde con un alcance predeterminado para el proyectil, y porque la capacidad de propulsión del motor de cohete se suprime de forma instantánea, cuando el valor real se encuentra que es al menos igual al valor establecido.
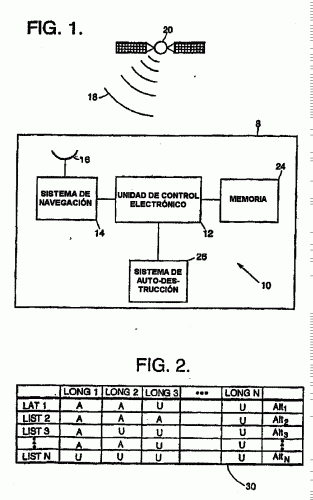
MISIL CON LIMITACION GOGRAFICA.
(16/05/2004). Ver ilustración. Solicitante/s: RAYTHEON COMPANY. Inventor/es: COBLEIGH, NELSON, E.
Un aparato proyectil capaz de volar , que comprende: un sistema de navegación que determina una posición del proyectil, caracterizado por: una memoria configurada para almacenar una pluralidad de posiciones, estando designadas algunas de la pluralidad de posiciones como posiciones aceptables del proyectil y estando definidas otras de las posiciones como posiciones inaceptables del proyectil; una unidad de control electrónico configurada para buscar una posición en la memoria que sea la más próxima a la posición determinada por el sistema de navegación , para determinar si la posición del proyectil es aceptable o inaceptable, iniciando la unidad de control electrónico una señal de autodestrucción que hace que el proyectil se autodestruya si la posición del proyectil es inaceptable.
PROCEDIMIENTO PARA DETERMINAR UN EVENTUAR DESAJUSTE ENTRE LA POSICION EFECTIVA Y UNA POSICION PREVISTA DE UNA AERONAVE.
(01/03/2003). Solicitante/s: AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE. Inventor/es: BARRAT, BENOæT, MAZAR, BRUNO, GRENIER, GILLES.
LA PRESENTE INVENCION SE REFIERE A UN PROCEDIMIENTO Y A UN DISPOSITIVO PARA DETERMINAR UN EVENTUAL DECALAJE EN POSICION DE UNA AERONAVE (A). SEGUN LA INVENCION: . SE EFECTUA UNA PLURALIDAD DE SUCESIVOS BARRIDOS DEL TERRITORIO SOBREVOLADO (T), MEDIANTE UN GENERADOR DE IMAGENES, TRANSVERSALMENTE A LA DIRECCION DE VUELO (D), DE MANERA QUE GENERE BANDAS DE IMAGENES; - A MEDIDA QUE AVANZA SU GENERACION, SE EFECTUA UN TRATAMIENTO DE DICHAS BANDAS DE IMAGENES; - SE AGRUPAN JUNTAS LAS BANDAS DE IMAGENES TRATADAS; Y - SE EFECTUA UN EMPAREJAMIENTO ENTRE ESTAS ULTIMAS Y UN MAPA PREESTABLECIDO DEL TERRITORIO (T), PARA DETERMINAR EL DECALAJE EN POSICION.
SISTEMA DE GUIADO DE ARMAS DE RECONOCIMIENTO AUTOMATICO POR GPS (SISTEMA DE POSICIONAMIENTO GLOBAL).
(01/02/2003). Solicitante/s: RAYTHEON COMPANY. Inventor/es: SCHNEIDER, ARTHUR, J.
SE PRESENTA UN SISTEMA DE GUIA DE ARMAS GPS (SISTEMA DE POSICIONAMIENTO GLOBAL) RELATIVO A LA AUTOINSPECCION . ESTE SISTEMA DE GUIA INCLUYE SATELITES MULTIPLES DE GPS QUE TRANSMITEN LOS DATOS GPS A UN SENSOR DE TIERRA . EL SENSOR DE TIERRA INCLUYE UN RECEPTOR GPS , UN ORDENADOR DE AUTOINSPECCION , UN FORMATEADOR DE DATOS Y UN TRANSMISOR . EL RECEPTOR GPS RECIBE LOS DATOS GPS Y DETERMINA UNA SEGUNDA UBICACION DEL SENSOR DE TIERRA EN BASE A LOS DATOS GPS. EL ORDENADOR DE AUTOINSPECCION DETERMINA UNA PRIMERA UBICACION DEL SENSOR DE TIERRA EN BASE A LOS DATOS GPS RECOPILADOS A LO LARGO DEL TIEMPO, QUE ES MAS EXACTA QUE LA SEGUNDA UBICACION. EL FORMATEADOR DE DATOS DETERMINA UN ERROR DE GPS ENTRE LA PRIMERA Y LA SEGUNDA UBICACION QUE ES TRANSMITIDO POR EL TRANSMISOR . EL ERROR DE GPS ES UTILIZADO POR ARMAS GUIADAS EN LA PROXIMIDAD DEL SENSOR DE TIERRA PARA INCREMENTAR SUSTANCIALMENTE LA EXACTITUD DE LAS ARMAS GUIADAS.
PROCEDIMIENTO Y DISPOSITIVO PARA DETERMINAR LA POSICION DE UNA AERONAVE.
(01/11/1997). Solicitante/s: AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE. Inventor/es: LAURES, PIERRE.
EL PRESENTE INVENTO SE REFIERE A UN PROCEDIMIENTO Y A UN DISPOSITIVO PARA DETERMINAR LAS POSICIONES SUCESIVAS DE UNA AERONAVE. RONAVE OCUPA UNA POSICION PI, EN UN PLANO IMAGEN: NAN LAS COORDENADAS DE LA IMAGEN DE UN PUNTO IMPORTANTE M DEL PAISAJE; . SE DETERMINAN LAS COORDENADAS DE LA IMAGEN DE UN PUNTO FICTICIO MI, SIENDO EL VECTOR MMI EQUIPOLENTE AL VECTOR PI-1 PI, SIENDO PI-1 LA POSICION DE LA AERONAVE EN EL INSTANTE TI-1; . SE DETERMINAN LAS COORDENADAS DEL PUNTO DE INTERSECCION ENTRE DICHO PLANO IMAGEN Y UNA LINEA RECTA QUE PASA POR DICHA POSICION PI Y PARALELA AL VECTOR VELOCIDAD DE DICHA AERONAVE; . A PARTIR DE DICHAS COORDENADAS, ASI COMO DE LA VELOCIDAD AXIAL DE LA AERONAVE Y DE LA DURACION ENTRE DOS MEDICIONES SUCESIVAS, SE CALCULAN LAS COORDENADAS DE DICHO PUNTO IMPORTANTE M, ASI COMO LOS COMPONENTES DEL VECTOR VELOCIDAD (V) EN UN REFERENCIAL LIGADO AL MISIL.
APARATO TRAZADOR DE RUTAS TACTICAS PARA DETERMINAR LA PROBABILIDAD DE MUERTE ACUMULADA ASOCIADA CON UNA RUTA SELECCIONADA.
(16/03/1988). Solicitante/s: BRITISH AEROSPACE PUBLIC LIMITED COMPANY.
APARATO TRAZADOR DE RUTAS TACTICAS PARA DETERMINAR LA PROBABILIDAD DE MUERTE ACUMULADA ASOCIADA CON UNA RUTA SELECCIONADA. CONSTA DE MEDIOS DE MEMORIA DE MAPA QUE CONTIENEN DATOS QUE REPRESENTAN LA INFORMACION POSICIONAL CONCERNIENTE AL DOMONIO; DE MEDIOS DE BASE DE DATOS QUE CONTIENEN DATOS QUE REPRESENTAN EL PERFIL DE AMENAZA DE CADA UNO DE UNA PLURALIDAD DE TIPOS DE AMENAZA; DE MEDIOS DE ENTRADA PARA INCORPORAR A LOS MEDIOS DE MEMORIA DE MAPA DE DATOS QUE REPRESENTAN LAS POSICIONES DE PARTIDA Y FINAL; DE MEDIOS DE PROCESADOR PARA TRATAR DATOS PROCEDENTES DE LOS MEDIOS DE MEMORIA DE MAPA Y DE LOS MEDIOS DE BASE DE DATOS PARA DETERMINAR CON ELLO LA PROBABILIDAD DE MUERTEACUMULADA ASOCIADA CON UNA RUTA PARTICULAR; DE MEDIOS DE VISUALIZACION PARA VISUALIZAR DICHA RUTA; Y DE MEDIOS DE VISUALIZACION PARA VISUALIZAR LA PROBABILIDAD DE MUERTE ACUMULADA.
UN METODO DE DETERMINAR LA PROBABILIDAD DE MUERTE ACUMULADA ASOCIADA CON UNA RUTA SELECCIONADA A TRAVES DE UN DOMINIO.
(01/03/1988) METODO DE DETERMINAR LA PROBABILIDAD DE MUERTE ACUMULADA ASOCIADA CON UNA RUTA SELECCIONADA A TRAVES DE UN DOMINIO. SE DETERMINA UNA RUTA OPTIMA A TRAVES DE UN AREA DE DISTRIBUCION DE AMENAZAS. PARA DETERMINAR LA PROBABILIDAD DE MUERTE ACUMULADA ASOCIADA CON UNA RUTA SELECCIONADA SE REALIZAN LAS OPERACIONES DE: I) SELECCIONAR UNA RUTA ARBITRARIA INICIAL QUE TIENE UN PUNTO DE PARTIDA Y OTRO FINAL Y QUE CONECTA UNA PLURALIDAD SELECCIONADA DE PUNTOS DE PASO; II) DETERMINAR LA PROBABILIDAD DE MUERTE ACUMULADA ASOCIADA CON DICHA RUTA ARBITRARIA; III) ALMACENAR DICHA PROBABILIDAD DE MUERTE ACUMULADA; IV) PERTURBAR CADA UNO DE DICHOS PUNTOS DE PASO POR TURNO EN UNA DIRECCION DADA PARA DETERMINAR UNA POSICION PREFERIDA LOCAL DE CADA PUNTO DE PASO EN FUNCION DE LA MAS BAJA PROBABILIDAD DE MUERTE ASOCIADA CON LOS SEGMENTOS DE TRAYECTORIA A…
PROCEDIMIENTO PARA EVITAR LA REORIENTACION DE APARATOS DISPARADORES PARA CUERPOS VOLANTES BALISTICOS.
(01/01/1982). Solicitante/s: GRS GESELLSCHAFT FUR RAKETEN-SYSTEME MBH.
PROCEDIMIENTO PARA EVITAR LA REORIENTACION DE UN APARATO DISPARADOR DE CUERPOS VOLANTES BALISTICOS, PROVISTOS DE UNA INSTALACION ELECTRONICA COMUNICADA ELECTRICAMENTE CON EL APARATO DISPARADOR. CARACTERIZADO PORQUE LAS INSTALACIONES DE DETERMINACION DE POSICION Y ORIENTACION, QUE PREFERIBLEMENTE ESTAN COLOCADAS EN EL CAMPO DE TIRO O EN LA ZONA NEUTRA DE COMBATE, DETERMINAN EL BLANCO DE TIRO Y TRANSMITEN SUS DATOS DE MOVIMIENTO (OS) DE MODO INALAMBRICO A UNA INSTALACION EVALUADORA (AF) ASOCIADA CON EL ORDENADOR DIRECTOR DE FUEGO (FR) DEL APARATO DISPARADOR, EN LA CUAL LAS SEÑALES RECIBIDAS (OS), EN COOPERACION CON EL ORDENADOR DE FUEGO (FR), SON CONVERTIDAS EN VALORES DE CORRECCION DE LA PISTA DE VUELO.
{kind=link}
{kind=link}