CIP-2021 : F41G 5/08 : Sistemas de seguimiento desde el suelo de los blancos aéreos.
CIP-2021 › F › F41 › F41G › F41G 5/00 › F41G 5/08[1] › Sistemas de seguimiento desde el suelo de los blancos aéreos.
Notas[t] desde F41 hasta F42: ARMAMENTO; VOLADURA
F MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA.
F41 ARMAS.
F41G APARATOS DE MIRA; PUNTERIA (aspectos ópticos G02B).
F41G 5/00 Sistemas para controlar la elevación o la dirección en los cañones (soportes para armas de fuego que permiten el movimiento en altura o en dirección p. ej. cureñas, F41A 27/00; computadores G06).
F41G 5/08 · Sistemas de seguimiento desde el suelo de los blancos aéreos.
CIP2021: Invenciones publicadas en esta sección.
Procedimiento y dispositivo para controlar la posición de una plataforma pivotable alrededor de tres ejes provista de un dispositivo de seguimiento de objetivos.
(20/11/2019) Procedimiento para controlar la posición de una plataforma sensible a la vibración provista de un dispositivo de seguimiento de objetivos, pivotable alrededor de tres ejes espaciales con las etapas de:
a) determinar la posición real de la plataforma ;
b) determinar una desviación de la posición real de una posición deseada para la plataforma , en la que un dispositivo de detección de objetivos previsto en la plataforma apunta a un objetivo (T) situado en una posición de destino (PT);
c) reconstruir la posición de destino (PT) absoluta del objetivo (T) a partir de la posición real de la plataforma determinada en la etapa a) y la desviación determinada en la etapa b);
d) estimar una trayectoria…
Método de control de tiro para defensa antiaérea basada en armas de fuego.
(27/03/2019). Solicitante/s: BAE SYSTEMS BOFORS AB. Inventor/es: WÄLBERG,KJELL.
Método de control de tiro de armas contra blancos aéreos cuando se dirigen hacia un objeto de protección, en el que se conoce la posición del objeto de protección, que comprende las siguientes etapas de método:
medir la posición del blanco aéreo,
estimar la posición del blanco aéreo,
estimar la velocidad del blanco aéreo,
caracterizado por las etapas adicionales de:
aplicar un modelo de la ley de guiado de blanco aéreo,
calcular las aceleraciones que debe aplicar el blanco aéreo con el fin de acertar en el objeto de protección,
predecir la trayectoria futura del blanco aéreo basándose en la posición del objeto de protección, la posición estimada del blanco aéreo, la velocidad estimada del blanco aéreo, la aceleración calculada del blanco aéreo,
calcular puntos de mira a lo largo de la trayectoria predicha, y
dirigir las armas hacia los puntos de mira.
PDF original: ES-2724325_T3.pdf
Procedimiento para la clasificación de proyectiles-RAM que se aproximan volando.
(03/01/2018). Solicitante/s: Airbus Defence and Space GmbH. Inventor/es: BODENMÜLLER,ALBERT.
Procedimiento para la clasificación de proyectiles-RAM, caracterizado por que alrededor de la trayectoria balística de vuelo de un proyectil-RAM anterior, clasificado por medio del análisis del perfil de vuelo se genera una zona de prueba espacial , realizando la generación de la zona de prueba utilizando datos a-priori, que reflejan el comportamiento de vuelo típico de munición-RAM, y/o datos cinemáticos del proyectil-RAM anterior, y verificando para la clasificación de un proyectil que aparece nuevo si se encuentra al menos en un instante dentro de la zona de prueba espacial definida anteriormente.
PDF original: ES-2660587_T3.pdf
Procedimiento para enfocar un haz de alta energía en un punto de referencia en la superficie de un objeto volador en vuelo.
(30/11/2016) Procedimiento para enfocar un haz de una fuente de radiación de alta energía , particularmente un haz láser, en un punto de referencia (HP) en la superficie de un objeto volador en vuelo , que incluye las etapas siguientes:
a) Grabación de un número de imágenes bidimensionales consecutivas del objeto volador en vuelo con un procedimiento de imagen que utiliza un dispositivo de adquisición de imágenes ;
b) Determinación de la trayectoria (T) de la ruta de vuelo del objeto volador como una secuencia de puntos de recorrido tridimensionales;
c) Determinación simultáneamente de la línea del ángulo de visión entre el dispositivo de adquisición de…
EVALUACION DE AMENAZAS Y ASIGNACION DE ARMAMENTO AUTOMATICAS BASADAS EN EL CONOCIMIENTO.
(16/07/2004) Método para la asignación automática de armamento que comprende las etapas de: (i) provisión de una base de datos de tipos posibles de blancos móviles, incluyendo dicha base de datos para cada tipo de blanco un conjunto de tipos particulares de armamento en una disposición priorizada, asignándoseles a dichos tipos de blanco un ranking de prioridad; (ii) provisión de una tabla de blancos de objetos detectados dentro de una zona protegida; (iii) selección en dicha tabla de blancos de un blanco detectado con el ranking de prioridad más alto; (iv) realización de un proceso automático de asignación de armamento para dicho blanco seleccionado, incluyendo dicho proceso la selección…
DISPOSITIVO Y METODO PARA CONTROLAR UN ARMA.
(01/02/1997). Solicitante/s: HOLLANDSE SIGNAALAPPARATEN B.V.. Inventor/es: HIJINK, BERTIL JAN, KELLER, JOHANNES MARTINUS.
DISPOSITIVO DE CONTROL ADECUADO PARA APLICAR A UN ARMA , POR EJEMPLO UN ARMA DE FUEGO (14B), PARA GENERAR SEÑALES DE CONTROL, POR EJEMPLO SEÑALES DE PUNTERIA SPR, UTILIZANDO UNOS DATOS DE TRAYECTORIA DE BLANCO PD OBTENIDOS CON UN SENSOR , POR EJEMPLO UN APARATO DE RADAR DE IMPULSOS . ADICIONALMENTE, EL DISPOSITIVO DE CONTROL GENERA UNAS SEÑALES DE FACTOR DE CALIDAD, QUE INDICAN POR EJEMPLO UN ERROR DE DISTANCIA ENTRE UN PUNTO DE IMPACTO PREVISTO (TP) Y LA POSICION DEL BLANCO. A ESTE FIN, EL DISPOSITIVO DE CONTROL ALMACENA DURANTE CIERTO INTERVALO DE TIEMPO UNAS SEÑALES EN UNA MEMORIA , COMO PUNTOS DE IMPACTO TP Y TIEMPO DE RECORRIDO TTP, EN BASE A LO CUAL SE GENERAN LAS SEÑALES DE PUNTERIA SPR.
INSTALACION DE CONDUCCION DE TIRO DE COMPENSACION DE LOS ERRORES DE PUNTERIA.
(16/06/1994). Solicitante/s: SOCIETE D'APPLICATIONS GENERALES D'ELECTRICITE ET DE MECANIQUE SAGEM. Inventor/es: DOREAU, JEAN, JAQUARD, PAUL, LELAY, JEAN-PIERRE.
LA INSTALACION, QUE SE UTILIZA ESPECIALMENTE EN ARMAS DE PEQUEÑO CALIBRE, CONSTA DE UN VISOR EN LA CAJA DE UN ARMA , DE RETICULO DESPLAZABLE EN RELACION AL EJE DE DICHA ARMA, Y DE ELEMENTOS DE EVALUACION DEL ANGULO DE DESVIACION QUE CONTROLA LA POSICION DEL RETICULO. CONSTA DE UNA CAMARA DE GRAN CAMPO ACOPLADA AL ARMA Y DE ELEMENTOS DE MEDICION DEL MOVIMIENTO APARENTE DEL BLANCO EN EL CAMPO DE LA CAMARA Y DE CALCULO DEL ANGULO DE DESVIACION A PARTIR DE LAS VARIACIONES DEL ANGULO DE PUNTERIA DEL ARMA MEDIDAS POR CAPTADORES, TAQUIMETRICOS O GIROMETRICOS Y DEL MOVIMIENTO APARENTE EN EL CAMPO DE LA CAMARA.
SISTEMA DE SEGUIMIENTO DEL BLANCO.
(01/11/1993). Solicitante/s: OERLIKON CONTRAVES AG. Inventor/es: PICCOLRUAZ, HEINZ.
UN SISTEMA DE SEGUIMIENTO DEL BLANCO CON GRAN SEGURIDAD DE SEGUIMIENTO Y MINIMA SERVOCARGA, COMPUESTO POR VARIOS GRUPOS (D1, D2, W1, W2, W3) DE SENSORES DE SEGUIMIENTO CON DIFERENTES TIEMPOS DE SEÑALES Y LAS CORRESPONDIENTES LINEAS DE MIRA DE GRUPO A GRUPO: - UN SERVO (S) QUE CONDUCE A ESTAS LINEAS DE MIRA AL BLANCO; - UN ESTIMADOR DEL BLANCO (ZE) QUE CALCULA EL MOVIMIENTO DEL BLANCO; - UN SERVO-ESTIMADOR (SE) QUE CALCULA EL MOVIMIENTO DEL SERVO (S) Y - UN REGULADOR (R) QUE DIRIGE AL SERVO (S) Y AL SERVO-ESTIMADOR (SE) A LA MISMA VEZ, PASANDO LA DIFERENCIA VECTORAL (EZ - ES) DE AMBOS CALCULOS MENCIONADOS (EZ Y ES) A CERO. LAS SEÑALES VECTORIALES (AI,I=1,2,3,) DE LOS GRUPOS SENSORES ANGULARES (WI) SE TRANSFORMAN EN UNA SEÑAL COMBINADA (MI=MAI.AI) CON LOS MULTIPLICADORES (MVI) CON LAS MATRICES (MAI), PASANDO AL SERVO (S) Y AL SERVO-ESTIMADOR (SE) DIRECTAMENTE, COMO SI UNICAMENTE EXISTIERA UN SENSOR ANGULAR CON LA SEÑAL COMBINADA (MI).
UN SISTEMA DE CONTROL DE FUEGO PARA DIRIGIR UN LANZADOR DE PROYECTIL HACIA UN BLANCO.
(01/03/1989). Ver ilustración. Solicitante/s: HUGHES AIRCRAFT COMPANY. Inventor/es: FROHOCK, MILLARD M.
UN SISTEMA DE CONTROL DE FUEGO PARA UN ARMA MONTADA A PIVOTAMIENTO EN ELEVACION Y EN AZIMUT EMPLEA UN SEGUIMIENTO OPTICO DE UN BLANCO MANUALMENTE A TRAVES DE UNA MIRA TELESCOPICA DIRIGIDA DE MODO FIJO, SUSTANCIALMENTE PARALELA A UN EJE GEOMETRICO DEL ARMA . UN TELEMETRO DE LASER DIRIGE SU RAYO LASER EN UNA DIRECCION PARALELA A LA MIRA TELESCOPICA PARA OBTENER LA MEDIDA DE LAS DISTANCIAS. EL SISTEMA INCLUYE UNA UNIDAD DE CONTROL QUE EMPLEA LOS DATOS DE ELEVACION DE AZIMUT Y DE TELEMETRIA PARA PREDEDIR LA TRAYECTORIA DEL BLANCO. LA UNIDAD DE CONTROL INCLUYE CIRCUITERIA ELECTRICA PARA DESPLAZAR EL ARMA A FIN DE PERMITIR LA INTERCEPCION DEL BLANCO POR UN PROYECTIL DISPARADO DESDE EL ARMA, Y CIRCUITERIA DE RETARDO QUE RETRASA UN DISPARO DEL ARMA HASTA QUE ESTA HA SIDO DESPLAZADA. LA ORIENTACION DEL ARMA SE DIRIGE MANUALMENTE DURANTE EL SEGUIMIENTO DEL BLANCO Y PASA AL CONTROL AUTOMATICO EN RESPUESTA A UNA ORDEN DE DISPARO.
UN SISTEMA DE ARMAS ANTIAEREAS.
(16/10/1978). Solicitante/s: ARES, INC.
Resumen no disponible.
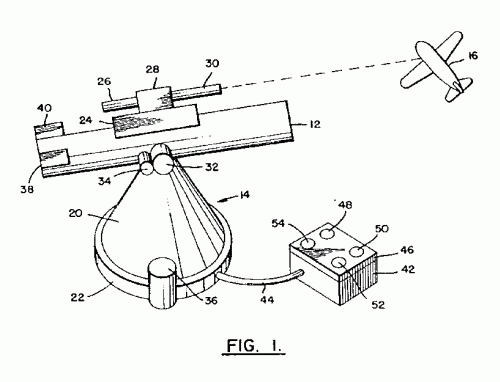
UN SISTEMA PARA INTERCEPTAR Y ATACAR BLANCOS AEREOS.
(01/05/1965). Ver ilustración. Solicitante/s: AKTIEBOLAGET BOFORS.
Resumen no disponible.
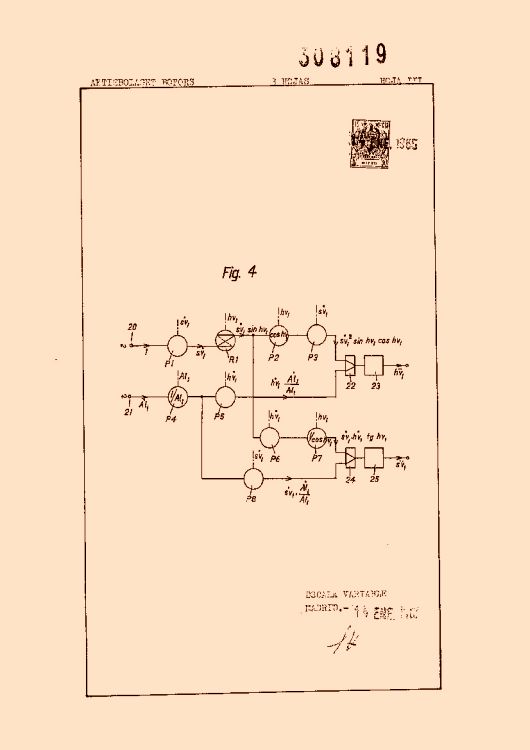
UN SISTEMA DE DIRECCION DE TIRO.
(01/05/1965). Ver ilustración. Solicitante/s: AKTIEBOLAGET BOFORS.
Resumen no disponible.
UN INSTRUMENTO DE CONTROL DE FUEGO CON CALCULADOR DEL PUNTO DE IMPACTO CONSISTENTE EN UN CALCULADOR ELECTRÓNICO DIGITAL PARA, POR EJEMPLO, NÚMEROS BINARIOS.
(01/12/1959) Instrumento de control de fuego a cuya conexión de entrada se suministran datos en forma de coordenadas polares que indican la posición de un objetivo, que tiene un convertidor de coordenadas que convierte las coordenadas polares en coordenadas cartesianas, una unidad de velocidad que forma las velocidades de las coordenadas cartesianas, un calculador del punto de impacto conectado con el convertidor de coordenadas y con la unidad de velocidad, cuyo calculador del punto de impacto indica en coordenadas cartesianas la posición del punto de impacto, es decir el punto en el que chocan el citado objetivo y un objeto dirigido de…
SERVOSISTEMA QUE TRABAJA CON VECTORES.
(01/11/1959) Servosistema que trabaja con vectores, con un elemento de control y un elemento controlado, en el cual dicho dos elementos pueden ser regulados en dos direcciones en ángulos rectos y en el cual el último elemento mencionado está provisto de un dispositivo indicador para cada dirección, que indica la regulación del elemento controlado en la dirección de regulación y de dispositivos de accionamiento para su regulación, caracterizado por el hecho de que el elemento de control tiene propiedades tales que suministra valores de control con carácter de vector de que un convertidor de coordenadas está conectado con dichos elementos indicadores y forma un vector de igual longitud que el primer vector mencionado y una orientación correspondiente a los valores de regulación suministrados para los dos elementos indicadores,…
{kind=link}
{kind=link}
{kind=link}