VEHICULO SUBMARINO OPERADO POR CONTROL REMOTO.
Vehículo submarino operado por control remoto que comprende el propio vehículo (1) y una unidad de control exterior,
encargada de suministrar al vehículo (1) señales de control de los propulsores (14) para maniobrar el vehículo (1) y gestionar las señales de datos de sensores e instrumentos del vehículo (1). El vehículo (1) está configurado de forma modular, integrando una pluralidad de módulos encargados del funcionamiento del vehículo (1), y comprende un casco autoportante no hermético formado por al menos dos partes (110, 111) separables unidas entre sí, teniendo funciones de carenado para reducir la resistencia hidrodinámica y de bastidor sobre el que se montan los módulos, sensores e instrumentos del vehículo (1), los cuales son montados en el casco (11) mediante elementos de fijación dispuestos en el casco o mediante su colocación en alojamientos dispuestos en el casco
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200702282.
Solicitante: ALBATROS MARINE TECHNOLOGIES, S.L.
Nacionalidad solicitante: España.
Provincia: ILLES BALEARS.
Inventor/es: ROIG BROMAN,DANIEL, ALVAREZ DIAZ,ALBERTO, TINTORE SUBIRANA,JOAQUIN.
Fecha de Solicitud: 14 de Agosto de 2007.
Fecha de Publicación: .
Fecha de Concesión: 22 de Diciembre de 2009.
Clasificación Internacional de Patentes:
- B63C11/42 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63C BOTADURA, VARADO, O PUESTA EN DIQUE SECO DE BUQUES; SALVAMENTO EN LA MAR; EQUIPOS PARA PERMANECER O TRABAJAR BAJO EL AGUA; MEDIOS DE LOCALIZACION O RECUPERACION DE OBJETOS SUMERGIDOS (redes flotantes, rampas de amerizaje flotantes o dispositivos similares para la recuperación de aviones del agua B63B 35/52). › B63C 11/00 Equipo para permanecer o trabajar bajo el agua; Medios para buscar objetos sumergidos (composiciones químicas para utilizarlas en aparatos de respiración A62D 9/00; accesorios o equipos para la natación A63B 31/00 - A63B 35/00; submarinos B63G 8/00). › con control independiente de propulsión y de dirección.
- B63C11/48 B63C 11/00 […] › Medios para buscar objetos sumergidos (medios para señalizar el emplazamiento de objetos hundidos B63C 7/26; aparatos de sondeo sónico G01S).
- B63G8/00B
Clasificación PCT:
- B63C11/42 B63C 11/00 […] › con control independiente de propulsión y de dirección.
- B63C11/48 B63C 11/00 […] › Medios para buscar objetos sumergidos (medios para señalizar el emplazamiento de objetos hundidos B63C 7/26; aparatos de sondeo sónico G01S).
- B63G8/00 B63 […] › B63G INSTALACIONES OFENSIVAS Y DEFENSIVAS EN LOS BUQUES; COLOCACION DE MINAS; DRAGADO DE MINAS; SUBMARINOS; PORTAAVIONES (medios de ataque o de defensa en general, p. ej. torretas, F41H). › Embarcaciones sumergibles, p. ej. submarinos (cascos de submarinos B63B 3/13; cámaras de buceo unidas mecánicamente a una base, p. ej. mediante un cable B63C 11/34; artefactos automotores de buceo B63C 11/46; torpedos F42B 19/00).
Fragmento de la descripción:
Vehículo submarino operado por control remoto.
Sector de la técnica
La presente invención se encuadra en el sector técnico de la robótica submarina.
Estado de la técnica
Actualmente está cada vez más extendido el uso de vehículos submarinos, tanto en aplicaciones profesionales, científicas y recreativas. El uso de estos sistemas para aplicaciones profesionales incluye la realización de trabajos submarinos (mantenimiento, limpieza de cascos, depósitos, tuberías y cables, reparación de elementos submarinos, tendido de cables, recuperación de objetos, ...) y la observación (control de obras y reparaciones en buques, estructuras sumergidas y puertos, inspección de buques y elementos sumergidos, seguridad, búsqueda de objetos, ...). En el ámbito de las aplicaciones científicas se incluye la medida de propiedades biológicas y físico-químicas, la observación del medio acuático y el entorno, y la toma de muestras. En el ámbito de aplicaciones recreativas se incluyen principalmente las de observación (visión de flora y fauna marina, etc.).
En general, los vehículos submarinos operados por control remoto están constituidos por: un vehículo submarino que realiza el trabajo o inspección, una unidad de control exterior y un cable umbilical de transmisión de energía y datos (que usualmente incluye señal de vídeo).
El vehículo está formado como mínimo por una serie de propulsores que le dotan de movilidad (mínimo 3 propulsores que permiten 3 grados de libertad, por ejemplo: avance/retroceso, giro, inmersión/ascensión), una o varias cámaras para observación (fija o móvil) y un compartimento estanco en el que se aloja la electrónica. Paralelamente, hay vehículos que pueden incorporar sensores e instrumentos: brújula, sensor de profundidad, sensor de temperatura, sónar de profundidad, ecosonda de barrido lateral, sensor de velocidad, sensor inercial para posicionamiento, detectores de sustancias químicas/biológicas, brazo manipulador o de trabajo, etc.
La unidad de control está en el exterior y está formada por 3 subsistemas: Un subsistema de aporte de energía al vehículo, un subsistema de mando y control y un subsistema de visualización. Estos dos últimos subsistemas pueden estar combinados en múltiples configuraciones, en forma de consola incorporada en una maleta de transporte, en forma de ordenador o consola portátil, etc. La unidad de potencia o energía puede estar incorporada en la unidad de control, estar incorporada en el vehículo en forma de baterías, o presentarse como unidad independiente.
El cable umbilical es un cable hermético que conecta el vehículo a la unidad de control transmitiendo la señal de control y la energía de funcionamiento en un sentido y los datos y señal de vídeo en el otro. Existen multitud de sistemas de transmisión, desde un cable coaxial sobre el que se modula la potencia y los datos digitalizados, o un cable multifilar que transmite el vídeo analógico, potencia y datos, hasta incluso cables de fibra óptica.
Se pueden distinguir 5 categorías generales vehículo operado por control remoto (ROV: Remotelly Operated Vehicle) dependiendo de su peso, profundidad de trabajo y objetivos:
- Grandes robots para obras submarinas y tendidos de cables, con un peso del orden de 10-15 toneladas.
- Robots para trabajos submarinos y plataformas petrolíferas, con un peso del orden de 1-5 toneladas.
- Robots multiuso para trabajos ligeros e investigación, con un peso del orden de 30-300 kg.
- Pequeños vehículos manejables por una persona, para inspección o trabajos ligeros, con un peso del orden de 10-20 kg.
- Vehículos muy pequeños y manejables para inspección o investigación, con un peso del orden de 3-6 kg y profundidad máxima de 50 a 75 metros.
Los sistemas de mayor tamaño son un producto maduro del que existen muchos modelos diferentes, ya que las primeras aplicaciones de este tipo de vehículos fueron trabajos a gran profundidad. La mayor parte de patentes existentes se refieren a accesorios o configuraciones para aplicaciones muy concretas. Existen patentes y modelos de utilidad de configuraciones completas de vehículos de pequeño tamaño como las descritas por ejemplo en WO 01/58751, ES 1051034 U, ES 2007966, ES 1051209 U.
A continuación se mencionan una serie características que pueden suponer un problema o inconveniente de los sistemas de pequeño tamaño existentes. Una característica común de los sistemas de vehículos submarinos operados por control remoto es la adecuación del sistema para solamente una o pocas aplicaciones concretas, unos solamente sirven para visión, otros sólo para recoger objetos, otros sólo para tomar medidas de uno o pocos parámetros, ... Otra característica común a la mayoría de los sistemas existentes es que reivindican la inclusión de accesorios modulares, cuando lo cierto es que tienen un protocolo de comunicación propietario y la instalación del accesorio (instrumento o sensor) debe ser realizado por personal especializado, con formación y conocimientos del sistema, o por personal técnico del fabricante del sistema. También hay que resaltar el hecho de que los sistemas existentes cuentan con una única unidad de control y visualización, normalmente con instalación y protocolos de comunicación no estandarizados.
Esta invención pretende superar los inconvenientes o falta de adecuación de los sistemas existentes, proponiendo como solución técnica un sistema totalmente modular y configurable por el usuario final, tanto en lo que se refiere a la modularidad del sistema de control y del vehículo, como en la instalación de sensores e instrumentos accesorios, a parte de proponer una nueva concepción de la estructura del vehículo.
Descripción de la invención
La invención se refiere a un vehículo submarino operado por control remoto de acuerdo con la reivindicación 1. Realizaciones preferidas de dicho vehículo se definen en las reivindicaciones dependientes.
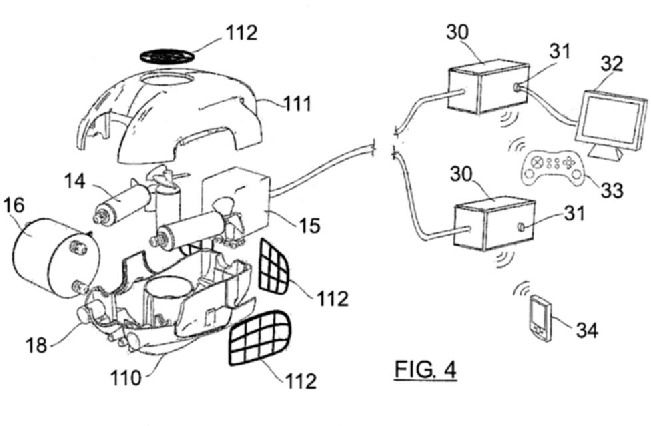
El vehículo submarino operado por control remoto objeto de la presente invención comprende el vehículo submarino propiamente dicho y una unidad de control exterior al vehículo con medios de procesamiento de datos, encargada de suministrar al vehículo señales de control para operar el vehículo y de gestionar las señales de datos que recibe procedentes del vehículo. El vehículo incorpora una pluralidad de propulsores para maniobrar el mismo, y una pluralidad de sensores e instrumentos. El vehículo está configurado de forma modular, integrando una pluralidad de módulos encargados del funcionamiento del vehículo, y comprende un casco autoportante no hermético formado por al menos dos partes separables unidas entre sí, teniendo dicho casco funciones de carenado para reducir la resistencia hidrodinámica, actuando además dicho casco de bastidor sobre el que se montan los módulos, sensores e instrumentos del vehículo, los cuales son montados en el casco por medio de elementos de fijación dispuestos en el casco o bien mediante su colocación en alojamientos dispuestos en el casco.
El vehículo incorpora preferiblemente los siguientes módulos:
- un mínimo de tres propulsores;
- un módulo de electrónica, instalado en un compartimento hermético, encargado de recibir las señales de control provenientes de la unidad de control; controlar, en función de dichas señales de control, los distintos módulos del vehículo; y transmitir a la unidad de control señales de datos provenientes de los distintos módulos, sensores o instrumentos.
En una realización preferida el vehículo incorpora tres propulsores eléctricos impulsados por hélice, uno vertical, situado sensiblemente en la vertical del centro de resistencia hidrodinámico a la inmersión, y dos horizontales, situados simétricamente con respecto al plano medio longitudinal vertical y sensiblemente en el plano horizontal que contiene el centro de resistencia hidrodinámico de avance longitudinal.
El módulo de electrónica puede estar conectado con cada módulo que controla por medio de un pasacables hermético o un conector estanco.
El vehículo puede incorporar adicionalmente al menos uno de los siguientes módulos:
- un lastre;
- una flotación adicional;
- un módulo de instrumentación con al menos una base de conexión estanca para instrumentos o sensores;
- un módulo de alimentación para suministro de energía eléctrica al vehículo.
- un sistema...
Reivindicaciones:
1. Vehículo submarino operado por control remoto, que comprende el vehículo submarino (1) propiamente dicho y una unidad de control (3) exterior al vehículo (1) con medios de procesamiento de datos, encargada de suministrar al vehículo (1) señales de control para operar el vehículo (1) y de gestionar las señales de datos que recibe procedentes del vehículo (1), incorporando dicho vehículo (1) una pluralidad de propulsores (14) para maniobrar el mismo, y una pluralidad de sensores e instrumentos, caracterizado porque el vehículo submarino (1) está configurado de forma modular, integrando una pluralidad de módulos encargados del funcionamiento del vehículo (1), y porque dicho vehículo (1) comprende un casco autoportante (11) no hermético formado por al menos dos partes (110,111) separables unidas entre sí, teniendo dicho casco (11) funciones de carenado para reducir la resistencia hidrodinámica, actuando además dicho casco (11) de bastidor sobre el que se montan los módulos, sensores e instrumentos del vehículo (1), los cuales son montados en el casco (11) por medio de uno de los siguientes:
- mediante elementos de fijación dispuestos en el casco (11);
- mediante su colocación en alojamientos dispuestos en el casco (11).
2. Vehículo submarino según reivindicación 1, caracterizado porque el vehículo incorpora los siguientes módulos:
- un mínimo de tres propulsores (14);
- un módulo de electrónica (15), instalado en un compartimento hermético, encargado de:
3. Vehículo submarino según reivindicación 2, caracterizado porque el vehículo (1) incorpora tres propulsores (14) eléctricos impulsados por hélice, uno vertical, situado sensiblemente en la vertical del centro de resistencia hidrodinámico a la inmersión, y dos horizontales, situados simétricamente con respecto al plano medio longitudinal vertical y sensiblemente en el plano horizontal que contiene el centro de resistencia hidrodinámico de avance longitudinal.
4. Vehículo submarino según reivindicación 2 ó 3, caracterizado porque el módulo de electrónica (15) está conectado con cada módulo que controla por medio de uno de los siguientes:
- pasacables hermético;
- conector estanco.
5. Vehículo submarino según cualquiera de las reivindicaciones 2 a 4, caracterizado porque el vehículo incorpora adicionalmente al menos uno de los siguientes módulos:
- un lastre (12);
- una flotación adicional (13);
- un módulo de instrumentación (17) con al menos una base de conexión estanca (172) para instrumentos o sensores;
- un módulo de alimentación (151) para suministro de energía eléctrica al vehículo (1).
- un sistema de visión (16).
6. Vehículo submarino según reivindicación 5, incorporando dicho vehículo (1) un módulo de instrumentación (17), caracterizado porque cada base de conexión estanca (172) dispone de una alimentación de energía eléctrica para alimentar a los instrumentos o sensores (173) y un puerto de comunicaciones con un protocolo estandarizado encargado de:
- transmitir los datos provenientes de dichos instrumentos o sensores (173); y
- configurar desde la unidad de control (3) el tipo de instrumento o sensor (173) conectado.
7. Vehículo submarino según reivindicación 6, caracterizado porque dispone de un sistema de reconocimiento automático del tipo de sensor o instrumento (173) conectado a cada base de conexión estanca (172).
8. Vehículo submarino según cualquiera de las reivindicaciones 6 a 7, caracterizado porque la conexión de un sensor o instrumento (173) al puerto de comunicaciones de cada base de conexión estanca (172) se realiza a través de un conector estanco situado en uno de los extremos de un compartimento hermético en el que es introducido dicho sensor o instrumento (173) junto con una electrónica de adecuación del protocolo de comunicaciones original del sensor o instrumento (173) al protocolo de comunicaciones estandarizado utilizado por el puerto de comunicaciones.
9. Vehículo submarino según reivindicación 8, caracterizado porque el compartimento hermético en el cual se introduce el sensor incorpora un lastre adicional o una flotación adicional de manera que la densidad total del instrumento o sensor (173) junto con su compartimento hermético sea sustancialmente igual a la del agua.
10. Vehículo submarino según reivindicación 9, caracterizado porque el lastre adicional o flotación adicional introducido en el compartimento hermético está distribuido de manera que el instrumento o sensor (173) junto con su compartimento hermético ejerce un momento nulo respecto a los tres ejes de coordenadas.
11. Vehículo submarino según cualquiera de las reivindicaciones 6 a 7, caracterizado porque la conexión de un sensor o instrumento (173) al puerto de comunicaciones de cada base de conexión estanca (172) se realiza a través de un conector estanco situado en uno de los extremos de un encapsulamiento hermético en el que es introducido dicho sensor o instrumento (173) junto con una electrónica de adecuación del protocolo de comunicaciones original del sensor o instrumento (173) al protocolo de comunicaciones estandarizado utilizado por el puerto de comunicaciones, siendo dicho encapsulamiento hermético de un material no conductor cuya densidad haga la flotación neutra de todo el conjunto.
12. Vehículo submarino según reivindicación 11, caracterizado porque el encapsulamiento hermético en el cual se introduce el sensor incorpora un lastre adicional o una flotación adicional de manera que la densidad total del instrumento o sensor (173) junto con su compartimento hermético sea sustancialmente igual a la del agua.
13. Vehículo submarino según cualquiera de las reivindicaciones 11 a 12, caracterizado porque el encapsulamiento hermético tiene una forma tridimensional adaptada para que el instrumento o sensor (173) junto con su encapsulamiento hermético ejerza un momento nulo respecto a los tres ejes de coordenadas.
14. Vehículo submarino según cualquiera de las reivindicaciones 5 a 13, incorporando dicho vehículo (1) un sistema de visión (16), caracterizado porque dicho sistema de visión (16) comprende una cámara (161) montada sobre un soporte móvil (162) con al menos un grado de libertad de rotación, estando instalado dicho sistema de visión (16) en un compartimento hermético con tapa transparente (163) a lo largo del recorrido de visión de la cámara (161).
15. Vehículo submarino según cualquiera de las reivindicaciones 5 a 14, incorporando dicho vehículo (1) un lastre (12) y una flotación adicional (13), caracterizado porque el lastre (12) y la flotación adicional (13) están dispuestos de forma que el centro de gravedad del vehículo (1) coincide sensiblemente sobre la vertical del centro de flotación, y a inferior altura; y porque la cantidad de lastre (12) y flotación adicional (13) se determina de forma que el vehículo (1) completo tenga una flotabilidad sustancialmente neutra.
16. Vehículo submarino según cualquiera de las reivindicaciones anteriores, caracterizado porque el casco (11) dispone, para cada propulsor (14), de un conducto de flujo (114) de baja resistencia hidrodinámica.
17. Vehículo submarino según reivindicación anterior, caracterizado porque los conductos de flujo (114) no están comunicados entre sí y porque las entradas del flujo aspirado y las salidas del flujo impulsado por cada propulsor (14) están protegidas por rejillas (112) con sección de baja resistencia hidrodinámica.
18. Vehículo submarino según cualquiera de las reivindicaciones anteriores, caracterizado porque la comunicación entre la unidad de control (3) y el vehículo (1) se realiza a través de una de las siguientes formas:
- mediante un cable hermético (2) que conecta la unidad de control (3) con el vehículo (1);
- mediante comunicación inalámbrica.
19. Vehículo submarino según la reivindicación anterior, en el que la comunicación entre la unidad de control (3) y el vehículo (1) se realiza a través de un cable hermético (2), caracterizado porque el casco (11) dispone de una pluralidad de anclajes (113), estando un tensor (116) del cable hermético (2) anclado por un extremo a uno de dichos anclajes (113) y por su otro extremo al cable hermético (2).
20. Vehículo submarino según cualquiera de las reivindicaciones anteriores, caracterizado porque la alimentación eléctrica del vehículo (1) se realiza a través de una de las siguientes formas:
- mediante un cable hermético (2) que conecta la unidad de control (3) con el vehículo (1);
- mediante un módulo de alimentación (151) integrado en un compartimento hermético del propio vehículo (1).
21. Vehículo submarino según cualquiera de las reivindicaciones anteriores, caracterizado porque los módulos de un mismo tipo disponen de una carcasa envolvente del mismo tamaño para las diferentes configuraciones electromecánicas interiores de ese tipo de módulo.
22. Vehículo submarino según cualquiera de las reivindicaciones anteriores, caracterizado porque la unidad de control (3) dispone adicionalmente de medios de visualización (32) configurados para visualizar los datos que recibe procedentes del vehículo (1) y medios de entrada de datos (33) para operar de forma remota el vehículo submarino (1).
23. Vehículo submarino según cualquiera de las reivindicaciones 1 a 22, caracterizado porque la unidad de control (3) dispone adicionalmente de un módulo de comunicaciones a través del cual se comunica con un dispositivo programable (34) configurado para ejecutar el control remoto del vehículo (1) y visualizar los datos procedentes del mismo.
24. Vehículo submarino según cualquiera de las reivindicaciones 1 a 23, caracterizado porque la unidad de control (3) dispone adicionalmente de un módulo de comunicaciones a través del cual se comunica con una consola de control y visualización configurada para ejecutar el control remoto del vehículo (1) y visualizar los datos procedentes del mismo.
Patentes similares o relacionadas:
SISTEMA DE AJUSTE DE MOTORES PARA VEHÍCULOS SUBMARINOS DE OPERACIÓN REMOTA PARA APROVECHAMIENTO DE EMPUJE DE MOTORES, del 16 de Julio de 2020, de UNIVERSIDAD SIMÓN BOLIVAR: La presente invención pertenece al campo de buques u otras embarcaciones flotantes, sus equipos y medios de localización o recuperación de objetos […]
DISPOSITIVO ROBOTICO SUMERGIBLE PARA CAPTURA DE IMAGEN, del 4 de Octubre de 2018, de FUNDACION UNIVERSIDAD DE BOGOTA JORGE TADEO LOZANO: Se relaciona la presente invención con el ramo de la ingeniería mecánica, particularmente con un dispositivo robótico sumergible que se desplaza sobre cables de […]
VEHICULO SUBMARINO NO TRIPULADO PARA INSPECCION DE EMISARIOS, del 29 de Mayo de 2018, de Seys MedioAmbiente, S.L: 1. Vehículo submarino no tripulado (ROV) para inspección de emisarios caracterizado por estar constituido por los siguientes elementos. Un vehículo submarino no tripulado […]
Dispositivo para dragar material de suelo bajo el agua, del 25 de Abril de 2018, de Tideway B.V: Dispositivo para verter material sobre un fondo o instalación submarina, tal como una canalización, comprendiendo el dispositivo: - una embarcación , provista […]
Vehículo planeador submarino, del 23 de Enero de 2015, de BOTIA VERA, Elkin Mauricio: 1. Vehículo planeador submarino compuesto de un cuerpo principal , un cuerpo de entrada , un cuerpo de salida y una superficie sustentadora […]
APARATO PARA DESPLEGAR UN OBJETO HASTA UNA POSICION OBJETIVO SUBMARINA Y METODO DE CONTROL DE DICHO APARATO., del 16 de Mayo de 2005, de BERNARD, FRANCOIS: Aparato para desplegar un objeto hasta una posición objetivo submarina, dotado de una baliza para transmitir rayos acústicos a […]
VEHICULOS DE CONTROL REMOTO., del 16 de Julio de 2004, de H2EYE (INTERNATIONAL) LIMITED: Cable umbilical para un ROV para transportar señales entre una parte sobre cubierta y un sumergible subacuático del ROV, requiriendo el […]
 DISPOSICION DE UN CONJUNTO ACUSTICO CON MEDIDOR DE VELOCIDAD DEL SONIDO, del 16 de Diciembre de 2008, de BERNARD, FRANCOIS: Disposición comprendiendo un conjunto acústico con un medidor de velocidad de sonido , adecuado para estar dispuesto debajo del agua, el conjunto acústico […]
DISPOSICION DE UN CONJUNTO ACUSTICO CON MEDIDOR DE VELOCIDAD DEL SONIDO, del 16 de Diciembre de 2008, de BERNARD, FRANCOIS: Disposición comprendiendo un conjunto acústico con un medidor de velocidad de sonido , adecuado para estar dispuesto debajo del agua, el conjunto acústico […]